基于ROV技术的超声杆件检测技术在深水导管架检测中运用
2022-04-22倪鹏李国锐肖晓凌金信岑徐进周爱源
倪鹏,李国锐,肖晓凌,金信岑,徐进,周爱源
(1.深圳市杉叶实业有限公司,广东深圳,518067;2.上海水下救捞工程技术研发中心,上海,200090)
0 引言
随着海洋油气资源向近海和深海的开发,大型固定式导管架平台服役数量逐渐增多,依据中国《海上固定平台安全规则》[1]、美国石油协会(API)及船级社的相关规范要求,需要定期对导管架进行检测。在导管架水下检测作业中,当杆件存在穿透型裂纹或破损时,海水将渗入到导管架构件的内部,使该杆件充水,通过FMD检测技术来检测杆件是否透水来判别其是否存在穿透型裂纹或其它使水渗到构件内部的缺陷。且根据API RP 2A[2]相关规定,FMD可以替代详细目视检查方法,FMD相对于详细目视检查效率更高,节省了大量海生物清理工作量,特别是在深水作业中其优势更加明显,搭载在ROV上的超声式和射线式FMD检测手段[3,4]在国外和国内大深度的导管架水下检测作业中广泛运用,本文主要介绍超声式FMD检测技术在深水检测中的运用。
1 方法与原理
1.1 超声式FMD检测原理
超声波杆件透水探测仪回波信号显示是A扫描,A型显示将超声波的信号幅度(Y轴)与传播时间(X轴)的关系;当超声波垂直入射到平界面,界面两侧的介质的声阻抗的差异越大,反射声能越大,透射声能越小[5]。超声波杆件透水探测仪回波信号显示是A扫描,A型显示超声波的信号幅度(Y轴)与传播时间(X轴)的关系,如果超声波在均值材料中传播,声速是恒定的,传播时间可转变为转播距离;当超声波垂直入射到平界面,界面两侧的介质的声阻抗的差异越大,反射声能越大,透射声能越小,当界面两侧的声阻抗接近时,反射几乎为0,声波完全透射。其中钢的声阻抗Z为46X106kg/m2.S,水的声阻抗1.5X106kg/m2.S,空气为400kg/m2.S,如超声波从钢中射向水时反射率和透射率分别为-0.937和0.063。在钢与空气界面,空气的声阻抗可以忽略不计,只有反射,没有透射。

式中:R为声强反射率;T为声强透射率;Z1、Z2为界面的两侧介质的声阻抗,单位为kg/m2.S[5]。
如果杆件为干式的,由于钢和空气的界面,空气的声阻抗忽略不计,几乎没有透射声能,在接触的钢管壁全部产生反射回波;如果杆件透水,声波透射过接触面的钢管壁和管壁内的水层,到达构件另一侧产生反射回波,探头接收到反射波,反射波的波幅和传输时间对应A型显示,然后超声式FMD软件通过一些电路和算法,来识别构件中是否有水,从而形成检测结论。原理示意图见图1。

图1 超声波杆件进水检测原理图[6]

图2 ROV机械手[7]
2 超声式FMD搭载在ROV机械手的可行性
2.1 机械手搭载FMD探头的操作可行性
使用Schilling Robotics提供的T4机械手,通过机械手连接到工具工装,可以实现FMD探头的平移移动和旋转运动。从机械手可以达到的平面和空间区域示意图,理论上机械手可以达到所检测杆件的顶部和底部。
在实际水下导管架检测过程中,ROV的夹持器/扶手抓住杆件附近的结构件如阳极块,使用连接有FMD探头工装的T4机械手去接触所检测的区域,ROV舵手通过带有力反馈位置控制器对机械手进行控制操作,使探头与杆件表面结合完好,然后水面操作人员进行测量读数。

图3 Quantum 系列及T4机械手
2.2 ROV-FMD探头的通讯连接可行性
根据英国RSL公司的ROV-FMD说明书[8]对于电子舱连接到ROV接口方式与此次使用Quantum 18 ROV预留的8针水密接头进行匹配。其中J2-9的Pin1取电DC 24V,Pin2(白色)接地及屏蔽线,Pin3和Pin4对应(TXRX)信号传输,信号通过光纤传输到水面控制单元,然后通过RS232转USB数据线连接到ROV控制间的电脑,测试仪器通信连接。
2.3 功能测试
由于此次需要协调外部ROV资源,本阶段的功能测试根据设备资源的可利用性和测试时机进行,大体分为3个阶段:工装夹具及探头未连接电子舱运用,在潜水员级FMD进行功能性测试;工装夹具及探头连接到ROV电子舱进行通讯测试;整体连接到ROV机械手进行车间测试。
测试包含通讯和功能测试,通讯测试正常时在软件的坐标轴上会出现蓝色的柱状;功能测试方法:在容器中放置直径为300mm的铁桶,高度385mm,管壁厚约2mm,桶内中加入一定量的水,水位的高度约低于容器水位,操作探头贴合桶壁的外表面,测试管内部有水、没水、水线分界线三个位置,并结合软件进行判读透水、未透水是否正常显示。
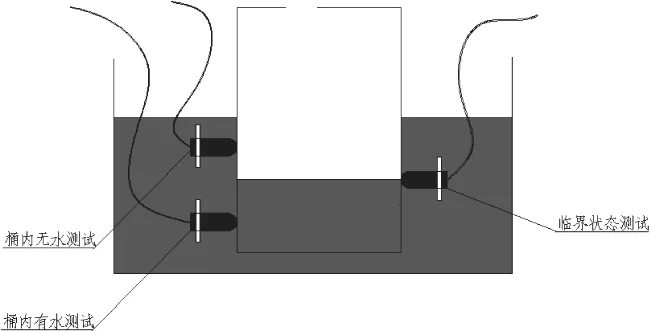
图4 功能测试方法
3 超声式ROV-FMD的限制和制约
3.1 FMD-ROV级超声杆件探测技术的局限性
如杆件透水时,水总是流向低位,根据超声波的原理,探头进行检测时接触管壁内的液位底部侧,结合厂家的仪器操作指南:检测水平杆件时,探头需要探测杆件的正下方点位,检测斜撑杆件时,需要探测杆件底部靠近焊缝附近的位置,对于钟点位未作要求。但在实际操作中,考虑到ROV进入导管架内部的风险性和机械手操作的局限性,ROV-FMD探头很难垂直地贴近杆件的正下方,这时只能检测杆件外侧,造成探头测量点取样的单一性,但也考虑到如杆件因开口性缺陷而进水和水压因素,通常水位会充满整个管内,现场的验船师通常也会接受。
在深水导管架的检测过程中,通常会存在安装有防溃孔的杆件,管中管或是开口型的管,由于其内部存在其它结构件、腐蚀、杂物或是海生物,会阻碍超声波的传输,这样探头表面接收不到回波,给检测结果带来误判;此时就需要结合实际情况进行说明,或是多个点位进行测量,确保数据准确。
3.2 探头工装夹具的限制
以往搭载在ROV机械手上的探头夹具采用类型的T型夹具,通过操作机械手直接把探头的前部顶到杆件上,刚性的接触到有曲率的的杆件外表面难以判断探头表面与杆件表面的结合度,特别是对于管径较小的杆件难度更大,且ROV前部的云台摄像头无法观察探头前部结合面,会给检测带来不确定性;加上探头前部也没有设计弹性反冲、调中装置,对于探头前部也会造成损伤。
4 工装改进设计及运用
在实际操作中,由于作业级ROV机械手不如潜水员手灵活且力度很大,就需要设计加工一个工装来安装探头并连接到ROV机械手,其主要作用是使探头表面能平稳地接触到杆件的外表面,并对探头和连接电缆进行防护。设计原则一是对探头及其电缆进行防护,二是增加一个磁性的自动捕捉功能,三是提供在机械手和夹具之间提供一个反冲装置,防止因机械手的动作导致探头的夹具捕捉功能失效。

图5 改进工装及功能测试
考虑到车间水池资源受限,此次ROV未进行水下试验或海上试验,但结合我司2近年来在南海油田导管架深水检测中的超声式FMD检测技术的实际运用经验,本次试验的目的是为了解决探头自动捕捉和夹具的阻尼功能。

图6 ROV级FMD以往水下作业实况
5 结语
随着人类开发海洋资源向深远海发展, ROV检测技术也必将成为深水检测的主要手段,超声式 ROV-FMD检测技术在国外导管架深水检测和管线内部流体检测作业中早已广泛运用,并被各船级社所推崇;随着工装夹具的改良和升级,ROV操控人员能更娴熟、更容易的操纵探头,使其与杆件表面贴合的稳定性得到提高,以ROV为载体的超声式FMD检测技术将会越来越广泛的应用在深水检测作业中。
