面向掘进工作面爆破质量评价的移动测量机器人技术研究
2022-04-20宋国栋
宋国栋
(应急管理部信息研究院,北京 100029)
爆破作业是煤矿掘进过程中掘进工作的重要环节,其爆破后的巷道成形质量直接影响到巷道安全和后续的支护作业[1-3]。虽然在作业前对爆破任务有工艺设计和安全检测,作业后有详细的安全检测规范,但是作业后可能存在的拒爆、残爆、顶板脱落等现象依然是对安全员构成威胁的重大隐患[4]。同时,爆破后巷道的成形效果是否能够达到预期设计目标很难通过人工检测达到精准的测量和评价。
掘进爆破后安全员一般采用便携检测设备与裸眼经验判断的传统安全评价方式,常用的检测设备有全站仪、经纬仪、水准仪、钢尺,将测量结果与设计图纸进行对照,以便评价爆破质量[5-8]。上述评价方法存在着诸多问题:①爆破作业后局部粉尘过大,影响测量精度和测量安全;②爆破后存在顶板不稳定现象,严重威胁安全员人身安全;③爆破后环境气体成分复杂,单一便携设备难以满足测量有毒有害气体浓度等参数的需要;④传统的目测方法难以精准评价对出矿进路顶板围岩稳定性的影响;⑤顶板离层仪定期检测数据为非连续性测量,难以精准和全面的表征巷道稳定性。
随着特种机器人技术的发展,适用于矿山井下特定区域、执行特定任务的机器人成为了矿山智能化的发展方向,也是解决掘进爆破后安全和质量评价问题的重要途径,本文基于履带式移动测量机器人提出一种用于评价掘进工作面爆破质量的方法。
1 移动测量机器人总体架构
掘进工作面完成爆破作业后,一般由安全员进入掘进工作面利用烟气传感器等进行爆破区域的有害气体检测,利用全站仪等设备进行爆破后巷道成形质量的测量[9-12]。使用移动测量机器人目的在爆破作业后初期替代安全员的上述工作,移动测量机器人应用场景如图1所示,因此机器人应具备在掘进工作面自主行走的能力,同时加装检测有害气体的传感单元和测量巷道的扫描装置。

图1 移动测量机器人应用场景
由于移动测量机器人主要用于完成掘进工作面放炮后的巡检工作,采集该区域环境数据并上传至管理平台,辅助相关生产技术人员分析回采工作面安全情况,确保安全后安排出矿人员设备进入进行出矿作业。主要实现的功能包括以下方面:
1)机器人根据巡检任务的要求,自主规划行进路径,实时监测工作面粉尘浓度、CO气体浓度、SO2气体浓度、O2气体浓度、CO2气体浓度。
2)机器人搭载的地质雷达对回采进路端部进行扫描,辨识顶板围岩稳定性。(当前采用的方式是巡检人员裸眼观测岩石类型、松散情况等属性以及顶板出水状态,结合经验分析围岩稳定性,作为后续采用何种支护方式的依据)。
3)机器人对已施工巷道进行三维激光扫描,完成井下巷道全景扫描后,将数据传到管控平台系统,相关工作人员对采集的扫描数据进行处理分析,生成井下巷道三维实体模型,利用该实体模型与设计施工图进行对比,完成巷道施工质量验收工作;同时对比多个时间段的实体模型变化情况,辅助分析巷道围岩稳定性。
4)井下环境恶劣,空间狭小,大型设备较多,有效视距有限,机器人运行过程中应具备自动识别避让系统。
根据移动测量机器人的功能定位,机器人应由移动平台和业务应用两个部分组成,其中业务应用包括SLAM扫描、环境气体检测、地质雷达检测三方面内容,检测数据通过网络传输到管理平台进行综合处理和分析,在PC端/移动端提供质量评价、三维可视化、辅助决策等方面的应用,机器人总体架构如图2所示。

图2 移动测量机器人总体架构
2 移动测量机器人实现方案
2.1 移动平台
移动平台是机器人运动的载体。掘进工作面形成初期,巷道地面平整度不高,轮式移动平台难以满足在巷道稳定行走的要求,因此移动测量机器人选用履带式移动平台作为机器人的运动载体。移动平台的主要技术指标见表1。
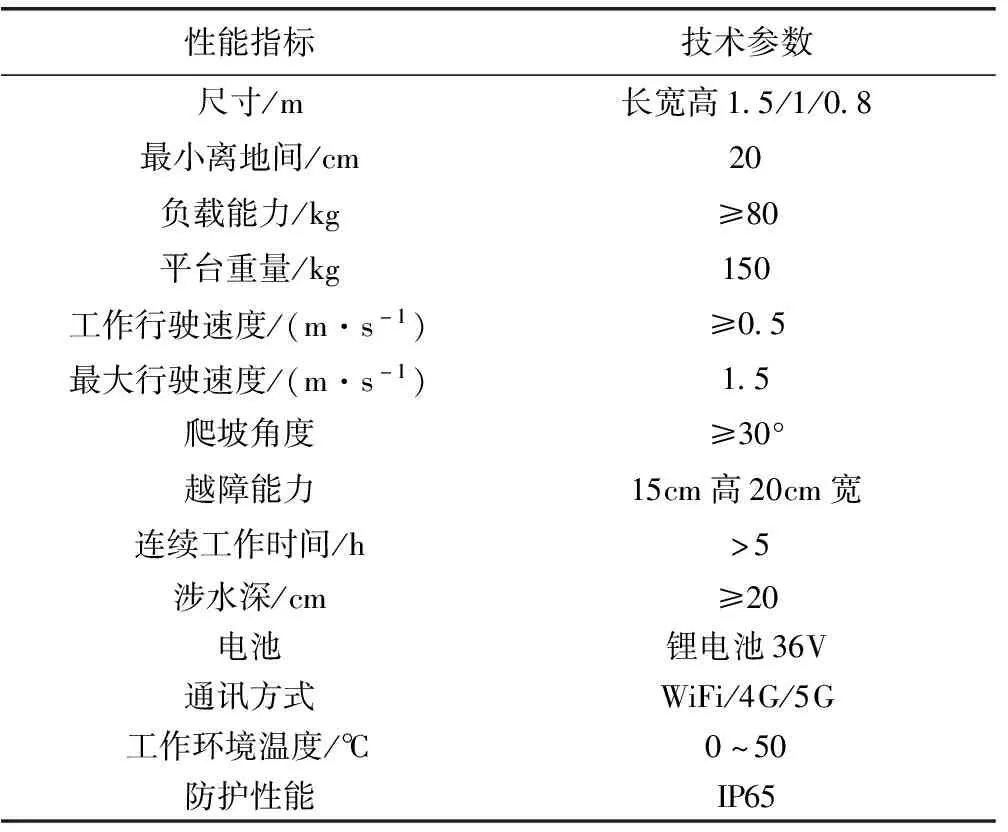
表1 移动平台主要技术参数
2.2 SLAM扫描
即时定位与地图构建(SLAM)是机器人领域的关键技术之一[13-17],相对于地面,通过SLAM扫描构建矿井巷道自然数字模型存在着诸多挑战:黑暗潮湿、空间狭窄、无GNSS信号、地面凸凹不平等。
SLAM扫描技术能够对视觉信息和激光雷达数据进行地图构建和三维重现,所构建的地图和三维模型在巷道形体评价中具有重要意义。
通过在移动平台上搭载SLAM扫描装置,利用SLAM装置重量轻、体积小的特点,对井下巷道进行全面的快速测量。获取矿山地下三维空间数据,用于巷道质量评价。SLAM的主要技术指标见表2。

表2 SLAM扫描主要技术指标
通过打开SLAM设备让其沿着巷道进行作业便可实现对巷道的三维数据采集,在采集过程中设备内部采用SLAM技术,实现数据的实时自动拼接和处理,简化处理流程。
1)点云配准。每一组数据都是对巷道尺寸的精确描述,对于多组巷道数据,使用点云自动配准的方法,对扫描的结果进行抽稀、降噪、剪切、平剖等处理后,再将多次测量结果进行拼接,将SLAM多个工程数据统一配准整合一起,得到地下矿山整体空间三维数据,如图3所示。

图3 SLAM扫描点云自动配准
2)巷道空间体数字孪生。对巷道的点云进行建模,可自动生成巷道模型,通过对巷道模型的拼接,形成井下巷道的模型更新和延伸趋势,如图4所示。将巷道内布置重大设备模型及运行数据相结合,实现矿山井下生产情况的数字孪生,为矿山智能化建设提供模型基础和数据依据。

图4 巷道空间体数字孪生
3)目标提取及重点部位分析。对于重点部分,利用裁剪盒工具提取目标所在位置。对多期的掘进工作面巷道数据进行对比,分析巷道的形变,可精准定潜在的安全隐患,协助矿山相关部门做出判断,进行支护方面的处置有效避免相关灾害的发生。
综上所述,利用SLAM扫描进行的三维重建和地图构建能够对巷道测量和GIS应用提供精准的数据支撑,相较于传统的巷道测量,SLAM扫描具有以下特点:①减小安全员现场测量的工作强度,数据处理成图的时间缩短;②扫描数据能清晰的反应现场,一目了然,可以更合理的布设生产的重大设备等;③平面位置和高程位置精度能够达到厘米级;④在爆破初期进入安全隐患不明确的区域,有效规避安全风险;⑤数据获取速度快,机器人自主完成,自动构图,快速构建三维模型。
2.3 环境气体检测
掘进工作面爆破作业后,巷道内粉尘浓度高、有害气体类型较多[18],通过机器人搭载环境气体检测装置能够有效避免人工检测方式给安全员带来的健康影响。
环境气体检测装置的搭载载体为移动测量机器人,其电源供电、数据传输、位置更新均依赖于机器人,因此对检测装置功耗、体积等参数有着严格的要求,多种参数的智能传感器能够适应集成度高的要求,各个传感器插槽可任意组合,传感器可现场任意互换,增强检测的灵活性,机器人搭载的环境气体检测装置应满足的技术指标见表3。

表3 环境气体检测主要技术指标
2.4 地质雷达检测
地质雷达是一种利用高频电磁波技术探测地下结构体的方法,能够根据现场探测显示异常区域,增强对内部结构的了解和数据掌握。地质雷达检测测试数据如图5所示。

图5 地质雷达检测测试数据
地质雷达采用现场成像的方式,能够对巷道内部结构进行现场分析,探测深度可以达到6~8m,基本能够满足掘进工作面爆破后初期对巷道质量和危险源的评价。地质雷达探测装置重量一般为4~5kg,在巷道检测过程中以机器人为载体,以移动平台基坐标为参考坐标系,将探头位置及探测位置数据与移动平台位置信息相结合,增强对危险源的评价和定位。
2.5 移动测量机器人总体构成
综合考虑掘进工作面爆破作业后的工况环境、评价需求、数据处理、综合分析等方面因素,移动测量机器人基于移动平台进行设计,平台上方搭载SLAM扫描单元、环境气体检测传感单元以及地质雷达检测单元,总体构成如图6所示。

图6 移动测量机器人总体构成
3 巷道质量评价
在掘进工作面巷道中,沿巷道开拓方向进行SLAM扫描和地质雷达扫描,能够获取巷道空间数据和地质体内部数据。首先对掘进工作面爆破作业后巷道进行扫描,确定巷道岩体内部异常区域,如图7所示。其次,对异常区域进的不同水平面分别进行扫描,得到巷道岩体内部水平剖视图如图8所示。最后,同理对该异常区域不同垂直面进行扫描得到巷道岩体内部垂直测量数据,通过以上一系列扫描,可在现场快速确定岩体内部异常空间区域的测量数据和异常区域的详细信息。将所得数据图拟合至巷道三维激光扫描图形数据中,对巷道内部岩体的异常结构进行判别,进而实现对巷道爆破质量的评价。

图7 巷道初次扫描数据分析异常区域多水平剖面扫描

图8 异常区域多水平剖面数据分析
4 结 语
面向掘进工作面爆破作业后的巷道环境,通过移动测量机器人实现爆破质量评价的方式能够对巷道成形情况和地质情况进行分析和评价。山西某煤矿的现场测试数据表明,机器人能够满足该阶段巷道质量的评价需求。
机器人通过搭载地质雷达对掘进工作面前端进行扫描,能够辨识顶板围岩稳定性。通过井下巷道全景扫描后,将数据传到管控平台系统,对采集的扫描数据进行处理分析,生成井下巷道三维实体模型,利用实体模型与设计施工图进行对比,完成巷道施工质量验收工作。通过对比多个时间段的实体模型变化情况,辅助分析巷道围岩稳定性。通过机器人的自主巡检,实现了掘进工作面爆破初期巷道安全及质量的快速评价,减少了危险环境下的作业人员,提高了掘进工作面的智能化水平。
