某型远程火箭炮控制系统训练模拟系统研制
2022-04-20李思雨黄少罗曹立军张建平吴巍屹
李思雨,黄少罗,曹立军,张建平,吴巍屹
(陆军工程大学石家庄校区,河北 石家庄 050003)
针对某型远程火箭炮武器系统训练和科研过程中实际装备数量较少,官兵在实装训练时不能全员参加,造成完全依托实装进行用炮、收炮、装弹和退弹训练,容易导致实装教学训练强度大、演示时间长、装备使用寿命缩短等问题。当远程火箭炮武器系统在训练过程中发生故障时,会严重影响训练和科研工作的进度。通过远火控制系统训练模拟系统(简称模拟系统)可以在脱离实装的情况下进行相关科目的操作训练,减少实装损耗,提高训练效率[1]。在工作过程中与指挥车等其他装备共同构成一个整体,模拟系统除完成本机单独的工作之外,还可以与其他模拟装备之间进行互联,构建武器系统的综合训练平台来进行指挥训练。
1 模拟系统研制方案
1.1 设计思路
模拟系统研制方案的整体思路是:采用与实装一致的组合面板,构建系统基本硬件环境,通过计算机模拟组合内部电路功能、实现各组合的逻辑控制,建立一个逼真的人机交互操作界面(环境),实现装备的操作训练、指挥训练和维修训练[2]。图1为控制系统训练模拟系统发射车模拟器。
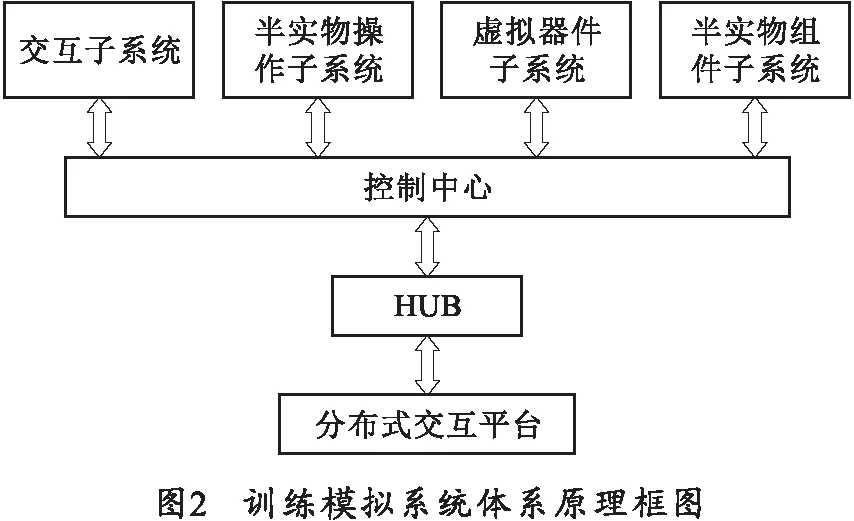
模拟系统由半实物操作子系统、虚拟器件子系统、半实物组件子系统、交互子系统和控制中心构成,各子系统通过控制中心连接形成一个有机的整体,在控制中心的统一协调控制下工作,控制中心与分布式交互平台相通,图2是其组成原理框图。
1.2 各子系统作用
1.2.1 控制中心
控制中心是整个系统的“大脑”。远程火箭炮武器系统正常工作时,系统内部关系多样、故障种类多,彼此关系错综复杂,所以要全方位、精准地在各个模拟子系统上把控制系统正常的运行状态和发生故障时的现象真实地模拟出来。设计思路是结合子系统运行时相互之间的控制、逻辑关系,把整个模拟系统以各个子系统为模块细化为不同单元,单元之间是独立的。控制中心作为模拟系统的枢纽,中央控制板输出指令,通过网络接口完成对各个子系统操作面板开关量、可调控变量等的监督,来实现对模拟系统的各子系统以及整个系统运行状态的控制。
1.2.2 半实物操作子系统
控制系统内部电路连接复杂,不同的控制面板功能各异。因此人员进行日常训练时,需要较强的操作能力。装备发生故障时,会由不同原因造成,根据故障现象很难及时排除故障原因,在进行维修训练时,更需要接近实际装备的训练环境。半实物操作子系统采用半实物仿真技术的控制面板在外观、功能上和实际装备几乎一样,创造出真实的操作训练环境。
半实物操作子系统结合远程火箭炮武器系统控制系统的运行规律,由硬件和软件两部分构成,硬件部分主要以实操面板为主;软件部分主要集中在终端上,完成信息的处理。
1.2.3 虚拟器件子系统
虚拟器件子系统是基于虚拟现实和计算机仿真技术来实现远程火箭炮武器系统的结构和组成、控制面板和组件之间的逻辑运行关系,从而搭建出整个训练环境。结合数据记录功能,可以存储大量训练数据,进行训练效果评估。还可以实现故障模拟,真实再现故障发生现象,便于人员虚拟维修训练。
1.2.4 半实物组件子系统
半实物组件子系统的主要功能是提供控制系统真实的工作环境,因此系统的各部分由实装组件构成,各部分组件之间用控制模块和功能不一的电缆连接,便于模拟系统正常工作输出的不同信号。根据不同的信号可以进行训练、检测与维修。
1.2.5 交互子系统
交互子系统主要是进行模拟系统与其他武器装备在信息上的互联互通,对链路上的信息进行有目的的控制。交互子系统转接口可以与两类装备进行交互,一是与实际的武器装备;二是与其他模拟系统。
1.3 工作方式
从全系统层面讲,模拟系统的工作方式主要分为联动工作方式和自主工作方式[3]。
1.3.1 联动工作方式
在该模式的工作下,模拟系统一方面完成本机工作,另一方面还要完成与其他设备之间的交互,以建立联调联试的武器训练平台。联动工作方式信息流如表1所示。

表1 联动工作方式各子系统输入、输出信息一览表
1.3.2 自主工作方式
在自主工作方式下,可完成模拟系统本机单独工作,与联动工作方式的区别是模拟系统不需要与武器系统综合训练仿真交互平台交互信息,控制中心控制协调半实物操作子系统、虚拟器件子系统、半实物组件子系统独立工作或协同工作[4]。
2 模拟系统硬件系统实现
基于系统硬件的研究是指各子系统硬件设计与实现,操作训练是一个典型的离散事件系统的仿真,整个过程是在操作产生的事件和远火控制系统内单体设备产生的事件的驱动下展开的。仿真运行的逻辑中,主要包括与具体的控制系统一致的开关机步骤、指挥软件操作和对操作过程的监督、记录3个部分。操作训练的全过程是激励各模拟器单体作用下的效果,是在联动工作方式下进行[5-6]。表1介绍了联动工作方式下,子系统输入、输出关系,因此主要对半实物操作子系统、半实物组件子系统和虚拟器件子系统分析研究。
2.1 半实物操作子系统
该部分采用“主控计算机+显示控制计算机+故障诊断计算机”的控制模式。
根据系统装备构成特点,半实物操作子系统以实际装备为基础,依据工作原理,研制出的操作面板在外观和功能上与实际装备相同,从而达到模拟训练的真实性。实装操作时主要是完成对操作面板和相关部件训练。硬件由两大部分组成:
1)主控计算机系统。输入操作指令,运行计算机相关程序进行相关操作训练和故障仿真,针对故障现象,人员完成故障诊断,从而实现维修训练。
2)显示控制计算机。通过网络协议,主控计算机生成的程序传输给显示控制计算机,显示计算机呈现出系统运行场景。
2.2 半实物组件子系统
半实物组件子系统的主要功能是提供装备子系统真实的工作环境,因此控制系统的各个部件采用实装部件,在部件之间连接及集成单元进行连接,以保证部组件组成、功能与实装相一致。同时,为了在半实物组件子系统的基础上进行操作使用和测试维修等训练,还需要根据实际需要对半实物组件进行改装,完成与实装连接。硬件由实装模块、控制模块、连接及集成模块等组成。构成如图3所示。
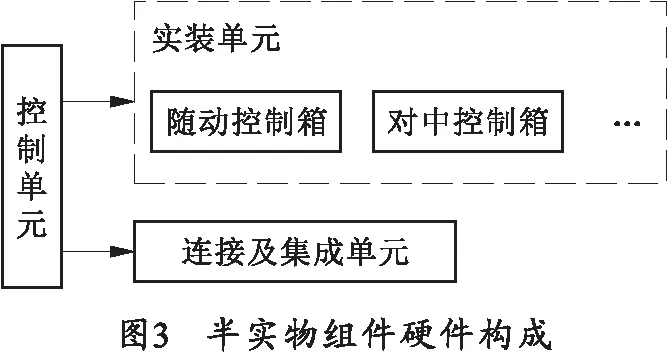
半实物组件子系统的硬件实现过程:连接及集成模块通过机械和电气连接,在控制模块的控制下为实装模块提供正常工作所需的各种电源、激励和控制信号,实现车载设备的正常功能。将设备的各实装部件连接起来使设备正常工作;开关可以控制链路部分产生的信号,便于观察和隔离故障;通过指示灯指示测试位置,以供观察;通过按键控制大屏幕液晶显示器呈现测试位置。将以上3部分通过机架有机地组合在一起,构成一个方便实用的操作环境。
2.3 虚拟器件子系统
虚拟器件子系统的实现基础是各种虚拟装备,主要由虚拟测试仪器、真实测试仪器、专用信号发生器3个部分构成。在该子系统下,参训人员可以完成装备虚拟训练、故障诊断后的虚拟测试、虚拟维修训练等。基于上述的训练需要虚拟器件子系统、控制中心、交互子系统进行信息交互。虚拟器件子系统可以与半实物操作子系统进行交互,也能够与实装操作子系统协同运行进行训练,从而实现训练同步感知。虚拟器件子系统也可以单独进行虚拟维修训练。
3 模拟系统软件系统实现
模拟系统设计时采用树状形的软件体系结构,编程方法是面向对象编程(Object Oriented Programming,简称OOP),软件系统实现如下:
1)计算机
操作系统:Windows XP、Windows 2000;
内存:3 GB;
显卡:GF系列显卡。
2)工具软件
分布仿真支撑软件:pRTI 1516/KD-RTI;
三维建模软件:Softimage/XSI、Lightwave 3D、Cinema 4D、PRO-E;
虚拟仿真软件:baiSimuWorks、PLC仿真软件;
建模工具:Trufun Plato;
编程环境:Visual Studio 2003/2005/2008,Eclipse;
系统数据库:MySQL/MariaDB。
3.1 子系统软件设计与实现
3.1.1 半实物操作子系统
软件层从功能上可分为应用层、模拟层、网络与通信层、硬件控制层和系统层。
半实物操作子系统能对武器系统的正常工作现象及常见的故障现象进行模拟,在综合考虑编程语言、用户需要和工程实践的基础上设计[7]。
系统的最上层为应用层,负责整个系统的管理及控制,并完成必要的人机交互及界面管理;其次是数据层,负责信息采集以及输出和通信控制;第三层为逻辑层,负责各组合的正常逻辑控制以及故障现象的逻辑控制。
3.1.2 交互子系统
模拟系统除完成专业训练外,还需与其他装备进行交互训练。模拟系统在设计时须在两个层面考虑集成问题。一是根据武器系统的信息流,考虑模拟器的输入、输出信息,既能够接收其他模拟器输入的信息,又能够输出信息到其他模拟器;二是设置数据接口,实现模拟系统间基于链路的分布互联。
体系结构图如图4所示。

3.1.3 虚拟器件子系统
从软件设计来看,虚拟器件子系统的虚拟操作训练、虚拟维修训练以及联合维修训练软件框架有形似性,各组件间都采用一致的基于消息的交互。虚拟操作训练、虚拟维修训练以及联合维修训练的软件部分采用了相同的设计模式,以消息管理组件为核心的“组件-框架”交互模式和基于消息的组件互操作模式[8]。提取3种训练框架中的共性组件构成虚拟器件子系统的支撑框架,3个训练任务的运行可视为在统一框架下的软件实例。虚拟子系统相关数据流如图5所示。

3.2 核心技术
研究训练模拟系统的实现过程,其核心技术如下:
1)仿真装备与实装的状态映射方法设计。状态映射是仿真装备结构的重要功能:一是仿真装备结构可以完全反映装备的工作状态或故障现象;二是在仿真装备上进行的状态切换、工作模式控制、故障设置、信号注入均可以在实装上得以表现[9]。仿真装备与实装的状态映射方法主要通过节点监测、分布式控制等手段实现,采用了与实物结构、尺寸完全相同的仿真技术制作,即可进行整体系统的操作演示,又可进行各部件的拆装、调试,完全可以替代对该系统的实装训练。
2)故障模式及故障机理建模。故障模拟是训练模拟系统对于虚拟维修实现的难点。故障模拟有两个前提:一是对装备的故障模式进行分析;二是建立装备发生故障时的机理模型。通过对原理研究以及实装实验实现的故障机理建模[10]。从单体设备的功能、组成着手,运用RCM和FMEA等理论对单体设备及其软件模块可能出现的故障进行分析,确定各单体装备的故障模式、现象以及输出的故障信号形式;然后,研究单体设备之间的连接关系和工作原理,分析传输信号的种类、数据组成、收发时序等参数。
3)实装产生信号与训练状态同步生成模式。产生故障时,明确单体设备之间影响特点,构建故障机理模型,从而实现故障模拟[11]。借助深度学习的诊断技术,对于不同信号形式的模拟,构建信号发生设备,内部嵌入多种专用信号发生模块,能够产生与实装相匹配的信号形式。在实际装备上进行故障试验,着重采录单体操作面板的故障现象、采集单体设备输入、输出端口的信号特征等,对故障机理模型进行修正和完善。设备正常运行时,输出正常信号;设备处于故障状态时,将此端口信号中断,没有输出。
4 结束语
远火控制系统训练模拟系统采用了一体化综合模拟设计方法,借助半实物仿真技术,能够替代实装的结构、动作教学,也可以完成对结构分解结合、故障设置与排除等维修训练。达到了结构、动作与实物的仿真效果;同时使系统中抽象的原理更加直观化。该模拟系统具有功能全面、仿真效果好、可视化程度高等特点,可用于部队、院校及训练机构的平时教学训练,有着明显的军事和经济效益。
