基于深度八叉树的粘接机器人移动轨线自动识别系统设计
2022-04-19韩宝虎赵亮韩希君
韩宝虎 赵亮 韩希君

摘 要:针对以往使用的GPS、电涡流法、超声波法移动轨线自动识别系统受到噪声干扰,而导致识别精度低的问题,提出了基于深度八叉树的露天矿粘接机器人移动轨线自动识别系统设计。采用充电桩对电池进行充电,保证系统持续供电8 h以上。利用IMX179型照相机,从后方和侧面角度拍摄了露天矿粘接机器人的移动画面。利用摇把开关控制avt31 HD视频跟踪器,跟踪机器人的移动轨迹。采用深度八叉树将识别数据绘制到三维实体中,避免了繁琐的数据查找過程,方便了三维子体的定位。采用白平衡技术消除外界光线干扰,获得清晰的视频图像。构造深度八叉树存储结构,对其进行迭代处理,得到单通道亮度图像,即:轨道线。利用三阶贝兹曲线对其进行拟合,确定机器人的工作轨线。实验结果表明:系统轨线长度200 m,识别精准。
关键词:深度八叉树;露天矿;粘接机器人;移动轨线;自动识别
中图分类号:TN958 文献标识码:A 文章编号:1001-5922(2022)03-0172-05
Design of automatic recognition system for moving
trajectory of bonding robot based on depth octree
HAN Baohu,ZHAO Liang,HAN Xijun
(Storage Center of Hiller Energy Co.,Ltd. Hulun Buir 021000,Inner Mongolia China)
Abstract:
Aiming at the problem that the GPS, eddy current method and ultrasonic method mobile trajectory automatic identification system used in the past is interfered by noise, which leads to the problem of low identification accuracy, an automatic identification system design for the mobile trajectory of the bonding robot in open-pit mine based on the depth octree is proposed. Use the charging pile to charge the battery to ensure that the system can continue to supply power for more than 8 hours. Using the IMX179 camera, the moving pictures of the open-pit mine bonding robot were taken from the rear and side angles. Use the rocker switch to control the avt31 HD video tracker to track the movement of the robot. The recognition data is drawn into the three-dimensional entity by using the depth octree, which avoids the tedious data search process and facilitates the positioning of the three-dimensional sub-body. White balance technology is used to eliminate external light interference and obtain clear video images. Construct a deep octree storage structure, and iteratively process it to obtain a single-channel luminance image, that is, a track line. The third-order Bezier curve is used to fit it to determine the working trajectory of the robot. It can be seen from the experimental results that the trajectory length of the system is 200 m, which is consistent with the ideal situation and has accurate identification results.
Key words:
deep octree; open pit mine; bonding robot; moving trajectory; automatic identification
目前,露天矿带式输送机与天然气管道之间工作环境温度一般为-45~40 ℃,作业环境温差较大,温度偏高[1]。由于环境温差较大导致输送机传送皮带寿命减少,局部容易开裂,造成传送故障。在实现裂缝实时,有效的粘接修复前,必须对粘接机器人的移动轨迹进行有效的识别[2]。采用人工检测的方法,在这种特殊的工作环境下,人工劳动强度增大,同时也存在着检测效率低、实时性差等缺点[3]。UAV飞行式 GPS移动轨道自动识别系统的使用,也会受到自身、信号传输和地面接收设备等因素的影响,从而引起 GPS定位信息的误差[4]。此外,露天矿粘接机器人运动轨迹坐标信息比较稀疏,无法对局部目标进行实时定位。
现有的方法多采用电涡流轨线自动识别系统或超声波轨线自动识别系统,其中涡流轨道识别系统是利用轨道探伤仪产生的感应电流来识别运动轨迹。但是,识别系统中高频激励信号的存在,使识别信号的处理和识别速度变慢。超声波自动识别轨道系统虽然是一项应用广泛的技术,但其探伤探头在被连续超声波脉冲发射到轨道上检测运动轨道时也会受到干扰,从而影响识别精度。因此,根据现有系统存在的问题,设计了一种基于深度八叉树的露天矿山粘接机器人运动轨迹自动识别系统。
1 系统硬件结构设计
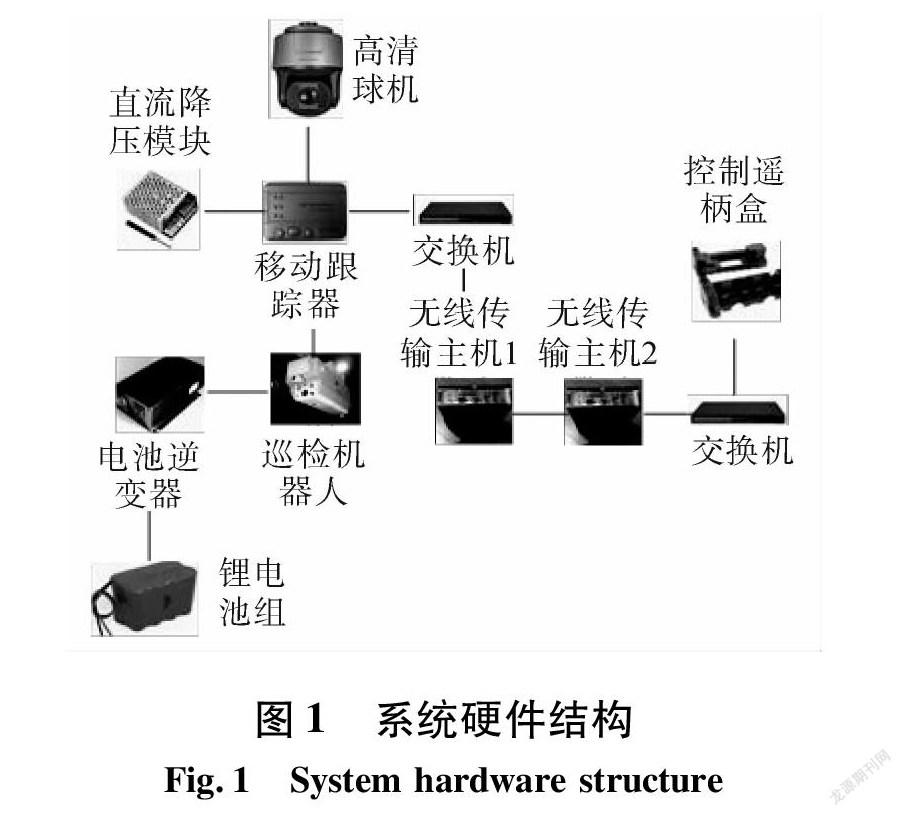
根据露天矿实际情况,设计了基于深度八叉树的露天矿粘接机器人移动轨线自动识别系统的硬件结构,如图1所示。
由图1可知,系统是通过将充电桩和充电探头连接在一起,从而为锂电池充电,并使用DC降压模块和逆变器为箱内设备供电[5-7]。无线通信主机1、2由识别箱侧的开关传送到监控屏幕;识别箱侧曲柄式跟踪箱发送的露天矿粘接机器人移动跟踪信号由无线通信主机2到达;1号识别箱侧及身体上的运动机器人运动跟踪器内有运动跟踪程序,用于跟踪粘接机器人的运动轨迹,可进行前进、后退、停止、粘接、复位、充电等各种作业[8-10]。
1.1 充电桩
根据充电桩在户外安装的实际工作情况,需要考虑其防水绝缘问题,避免接通电源后发生火灾事故[11]。所以自制的阻燃有机玻璃充电桩,在电机内部使用高碳钢电刷充电探头,保证了充电探头与接触点的铜片接触时不会产生火花或电弧,且导电性能好、耐磨、消弧性能好,其结构如图2所示。
由图2可知,充电桩内置高强度压缩弹簧,电动制动充电探针。通过对压缩弹簧的压力,使带电探针与铜板充分接触,保证充放电接触面良好,不受外界环境影响。针对每台设备的功耗,在供电方面采用48 V、80 AH锂聚合物电池组供电给系统充电探头,可保证整个系统持续供电8 h以上[12]。锂电池充电器连接着充电探头,并连接到可充电的锂电池铜片上[13]。本机配有锂电池组和充电器,电池过充保护电路,充电后能自动停止充电,对锂电池组起到保护作用;同时能有效延长其使用寿命,节省成本。
1.2 高清球机
采用高速摄像机对露天矿粘接机器人的运动轨迹进行拍摄时,可以通过多台高速摄像机同时拍摄,实现多角度观测。选取采样角时,应根据运动模型建立原理,将相机置于目标物的背面及侧面,进行后角及侧角的拍摄[14]。依据视频逐帧播放分析运动目标的轨迹和运动过程,对所建立的模型和标记点进行路径跟踪。采用IMX179摄像机拍摄作物工业级光学全波镜头,可任意角度选择,成像清晰,并增加了补光夜视功能[15]。根据对模型和标点的路径跟踪,即插即用USB2.0的标准速度可以达到60 MB/s;同时还可以使用 UVC驱动程序。
1.3 移動跟踪器
利用avt31 HD标取差器的设计思想,将捕获和自跟踪两种模式下的平台运动,实现了对目标运动的预测准速,使跟踪更可靠、更平滑、更全面。avt31型 HD视频跟踪器,跟踪性能平稳可靠,通用性好,能够实现目标运动的跟踪与预测[16]。该跟踪器具有多核 DSP和 FPGA作为主芯片,具有24位的 RGB格式视频输入接口;在VGA接口的 RGB部分,叠加了同步信号和 RGB部分,可实现隔行逐行处理。该视频接口实现了数字模拟 HD视频,可支持高达1 080 p 60 Hz的逐行视频,像素频率可达165 MHz,可进行S232通信和控制接口。
1.4 摇柄开关盒
在摇杆开关盒上设置有跟踪手柄,跟踪中心的操作人员在从显示器上远程识别场景后,仅需在摇杆开关盒上设置跟踪手柄,即可对粘接箱的移动和停止进行检查和控制。操作者只需坐在室内进行跟踪,通过观察屏幕就能自动识别出运动轨迹,同时完成自动识别工作。本实用新型还具有一键识别、一键复位充电功能,能够实现移动轨线智能识别与控制。
2 系统软件部分设计
2.1 基于深度八叉树三维体识别数据绘制
在面对大量复杂、繁琐的三维数据时,三维数据的实时绘制是一个非常困难的问题,计算和绘制速度都很慢。当前即使是最高端的绘图工作站,也不能达到高逼真度的三维视觉效果,不能满足实时绘制的要求。因此,需要使用深度八叉树来实现大规模三维数据体绘制的要求。
三维数据域具有不同的数据结构,如结构化和非结构化,结构化数据结构主要有3种形式:方格网格、矩形网格和不规则网格。由于规则排列的网格并不局限于每个网格,只需要在网格点的属性值之外,
记录初始点的位置坐标和网格间距,存储容量小,仅适用于大规模使用和管理。网格数据结构是一种具有规则间隔的网格阵列,它可以将原始数据卷分割成大小相等的子块。如果数据块过大或过小时,根据当前系统的软硬件条件,可能会造成数据调度过度,影响机器的处理能力。为此,提出一种基于深度八叉树的算法,三维数据处理过程主要以三维数据体的细化为基础,对三维轴的各个方向进行细化处理。
数据三维体字节数量的计算公式是:
N=log8VV0
式中:V表示识别数据三维体字节数量;V0表示载入数据字节数量。
为实现对三维数据体从粗略到详细的全局观测,并支持全局体绘制,需要对其进行编码,以建立子实体间的空间关系。大型三维数据体可以是多个不同尺寸粒度的子体,而且每个子体都具有单独绘制处理的能力。子实体之间的空间关系主要表现在两个方面:一方面,它主要表现为一个粗壮子实体与若干弱细子实体之间的细节层次关系;另一方面,它又表现为子实体之间的邻接关系,即同一层的位置。采用此代码是为了方便子体定位和避免复杂的搜索过程。
2.2 基于深度八叉树自动识别流程设计
基于深度八叉树露天矿粘接机器人移动轨线特点,进行如下流程设计。
步骤1:由无人机摄取轨道视频图像,并对其进行预处理,使用白平衡处理方法来消除环境光的影响。首先根据预先的识别结果提取相关区域,然后将相关区域转换成单通道亮度图像。详细内容为:采用灰度世界法消除环境光的影响,使 R、G、B图像经过变换后,其平均灰度值趋于同一水平;通过对单道亮度图像进行转换,将 BGR模式图像转换为 HLS模式,并以L分量表示亮度信息,通过4次量化亮度值得到最终的单通道亮度图像。
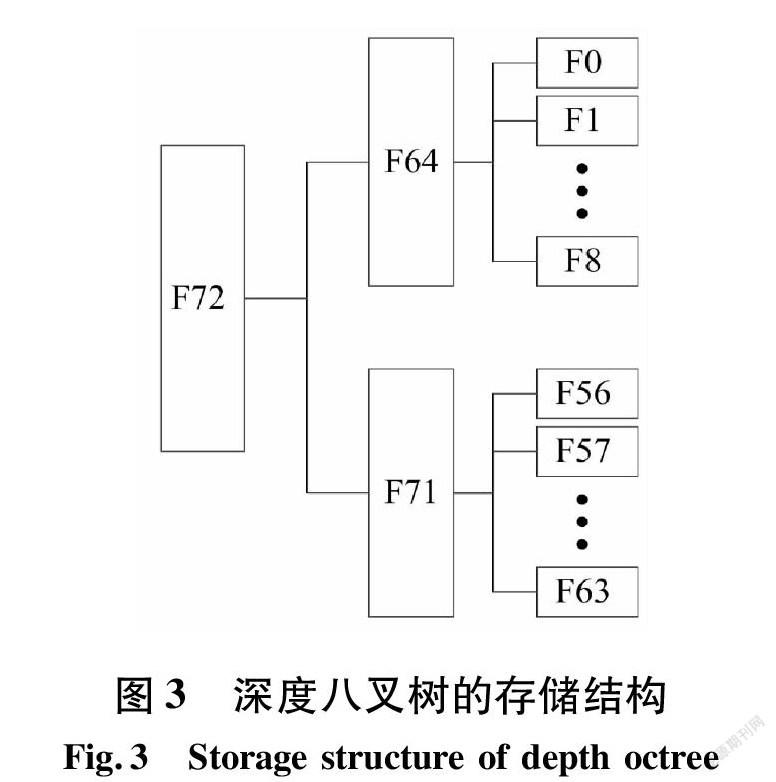
步骤2:利用深度八叉树算法实现了视频图像的轨迹识别。依据深度八叉树识别原理,使每个节点对应一个磁盘文件。
图1显示了深度八叉树的存储结构。
由图3可知,该存储结构包括(8n-1)/7个文件。其中,n表示八叉树深度,在进行稀疏处理之后,完成了所有文件处理。
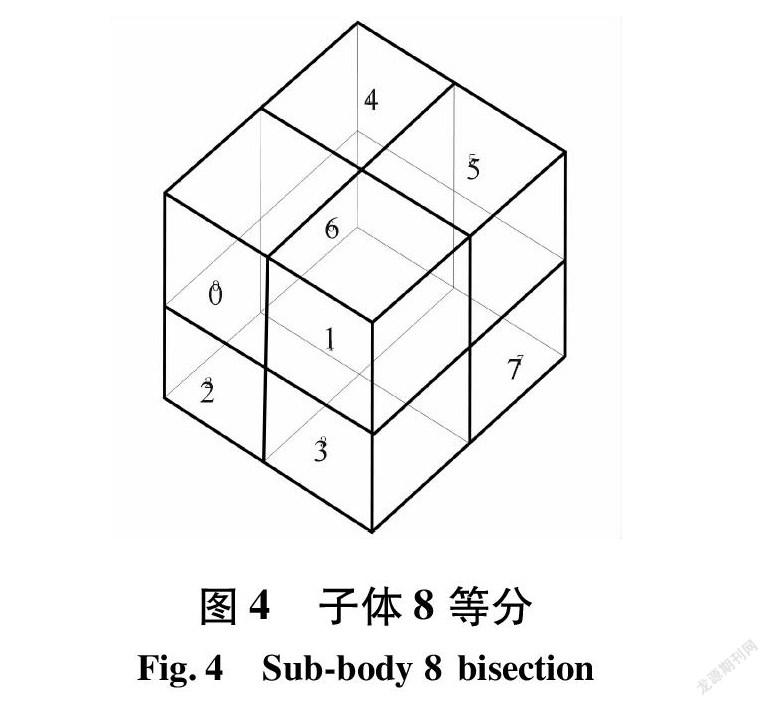
根据深度八叉树型逻辑结构,将露天矿粘接机器人的运动轨迹数据进行分块处理。每个子段被分成8个子段,也就是说,每个子段被分成8个子段,每个子段对应一个根节点,子体8等分如图4所示。
如图4所示,等分后得到完整的八叉树,且八叉树节点的数据大小相同,对应于露天矿粘接机器人的轨迹数据。从叶节点开始,各节点对应的露天矿粘接机器人运动轨迹可识别如下。
每个叶子节点的父节点具有1/8的数据大小,通过两次稀释值(即点之间的时间间隔),将8个子节点的数据合并成1/8的子节点数据大小,得到所有非叶子节点的对应数据。对合并后的相应数据进行重复稀释,经迭代处理,可以得到单通道亮度图像。比较单通道和动态门限的亮度值,作为新的识别节点,最终获得亮度较大的二值图像。判别二值化图像的熵是否大于阈值,或者迭代处理次数是否大于10次。满足此要求时,处理过程将停止,否则将继续迭代处理。对二值图的连通域处理,选择区
域最大的两个连通域对噪点进行消噪,从而得到轨道线。
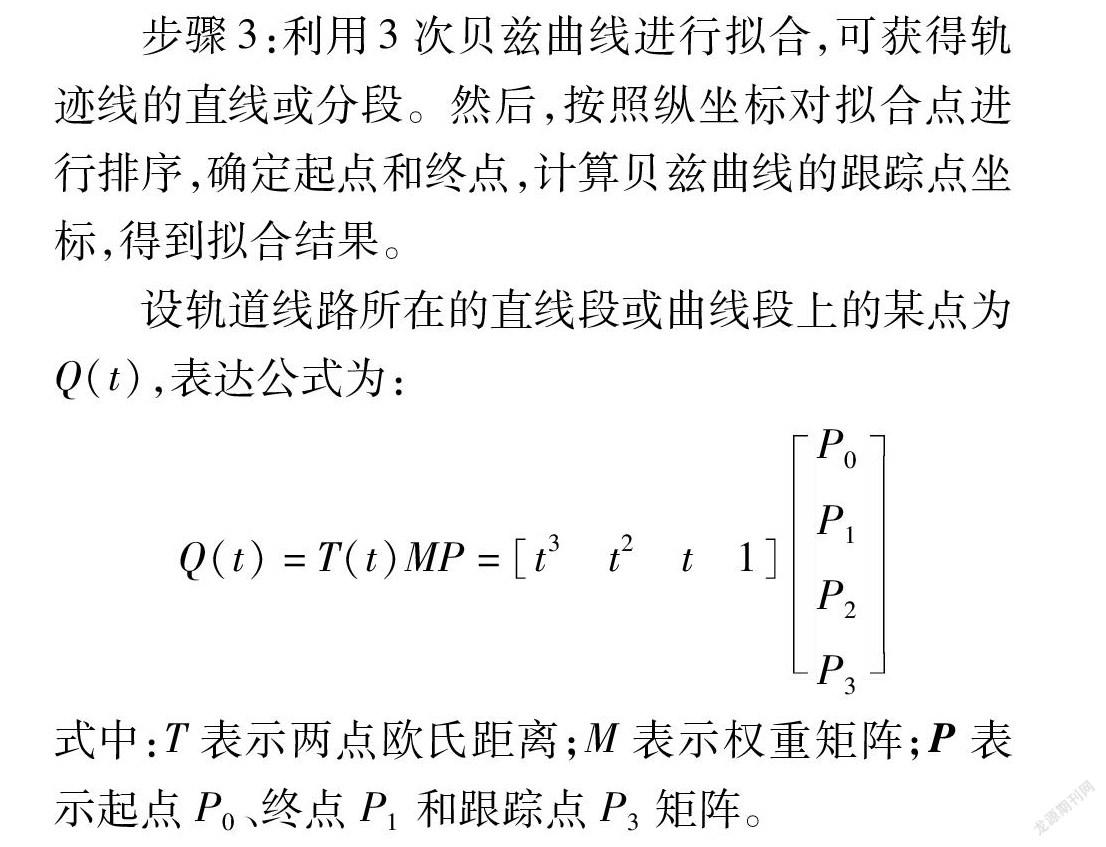
步骤3:利用3次贝兹曲线进行拟合,可获得轨迹线的直线或分段。然后,按照纵坐标对拟合点进行排序,确定起点和终点,计算贝兹曲线的跟踪点坐标,得到拟合结果。
设轨道线路所在的直线段或曲线段上的某点为Q(t),表达公式为:
Q(t)=T(t)MP=[t3 t2 t 1]
P0
P1
P2
P3
式中:T表示两点欧氏距离;M表示权重矩阵;P表示起点P0、终点P1和跟踪点P3矩阵。
以纵坐标为基准,纵坐标上的最小点为起点,纵坐标上的最大点为终点,对所得轮廓点进行计算。将乘法计算转化为大量的加法计算,并进行参数值拟合。通过对前后帧的左右距离进行计算,根据前后帧之间的距离判断识别结果是否正确。当两点欧氏距离大于设定阈值像素时,在一定的移动范围内,识别结果将被判定为干扰轨线;否则,识别结果将被判定为真实移动轨线。
3 实验结果与分析
以露天煤矿为背景,对基于深度八叉树的露天矿粘接机器人移动轨线自动识别系统设计合理性进行实验验证分析。
3.1 模拟跟踪
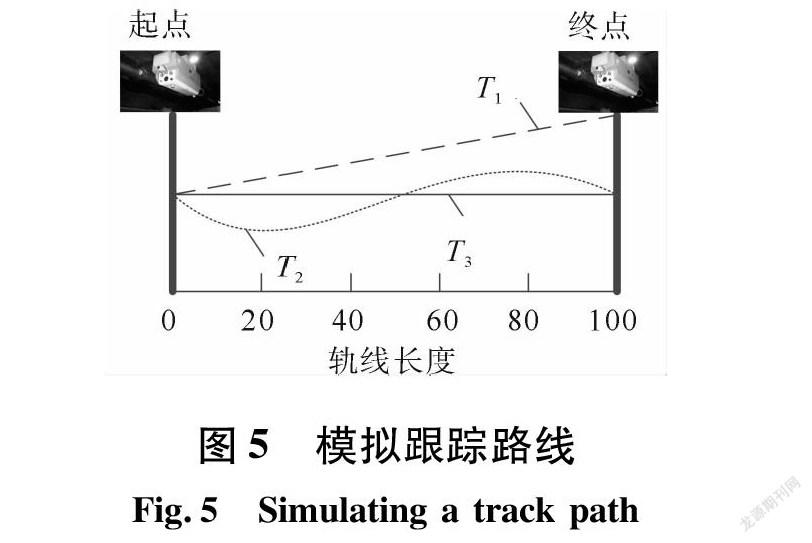
将露天矿粘接机器人在搭建的模拟实验环境中进行跟踪实验,设置起点与终点之间距离为100 m,粘接机器人由起点运行到终点后,再返回到起点,模拟跟踪路线主要有3条,如图5所示。
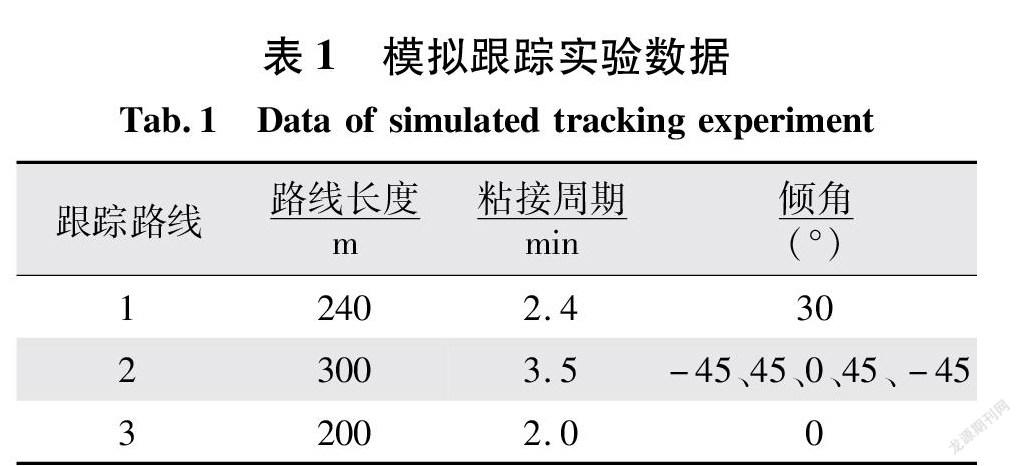
在图5所示路线下,得到的模拟跟踪实验数据如表1所示。
由表1可知,为了节省时间,避免繁琐布置,选择了线路3作为模拟跟踪线路。
3.2 实验结果与分析
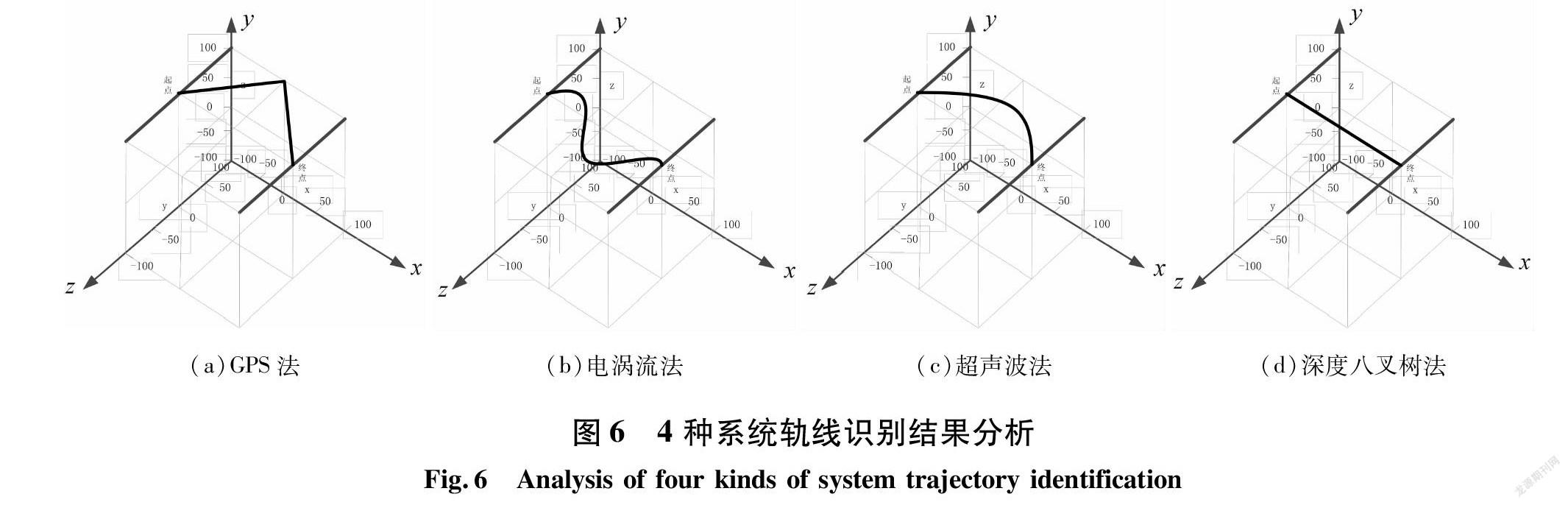
分別使用GPS、电涡流法、超声波法和基于深度八叉树移动轨线自动识别系统对露天矿粘接机器人移动轨迹识别,识别结果如图6所示。
由图6可知,使用GPS法、电涡流法、超声波法轨线识别结果与理想情况不符。其中,GPS法移动轨迹长度282 m,电涡流法移动轨迹长度223 m,超声波法移动轨迹长度222 m,深度八叉树法移动轨迹长度200 m。由此可知,使用深度八叉树法设计的系统识别结果更加精准。
4 结语
通过对露天矿粘接机器人在实时移动时出现的问题,提出了三维大尺度数据场深度八叉树的概念,并对其应用进行了分析。该系统采用深度八叉树方法,实时采集矿山粘接机器人的运动轨迹,通过三维数据场绘制,精确自动识别出粘接机器人的运动轨迹,可广泛应用于露天矿山日常巡视工作中,大大提高了工程管理效率。
在未来,将深度八叉树这一先进的理念运用到电厂、大型企业车间检查与维修中,使得露天矿粘接机器人能适应各种不同的应用场合。
【参考文献】
[1] 郝勇,袁智.综采工作面自动巡检机器人系统设计[J].煤炭科学技术,2020,48(8):145-149.
[2] 李艳,周莹亮,李可可.基于STM32的移动机器人目标自动跟随系统设计[J].电子器件,2019,42(2):403-410.
[3] 刘帅,王敏珍,刘超.基于模式识别的机器人运行轨迹数据分类存储系统设计[J].现代电子技术,2020,43(4):145-148.
[4] 李业谦,陈春苗.基于ROS和激光雷达的移动机器人自动导航系统设计[J].现代电子技术,2020,43(10):176-178.
[5] 彭盖伦,彭道刚,张浩,等.基于Faster R-CNN和模糊PID的巡检机器人云台控制研究[J].微电子学与计算机,2019,36(3):61-65.
[6] 张军,韦鹏,王古超.基于ROS的全向移动机器人定位导航系统研究[J].组合机床与自动化加工技术,2020(6):119-122.
[7] 杨知化,汤鹏,单晓辉,等.海上升压站自动巡检机器人颜色检测算法研究[J].红外与激光工程,2020,49(S2):255-261.
[8] 胡鹏,吴功平,曹琪,等.巡检机器人行驶轨迹定位方法[J].机械设计与制造,2019,337(3):23-26.
[9] 李荣,栾贻青,王海鹏,等.全向四驱变电站巡检机器人运动控制系统设计[J].机床与液压,2020,48 (8):112-116.
[10] 张树生,马静雅,岑强,等.煤矿综采工作面巡检机器人系统研究[J].煤炭科学技术,2019,47(10):136-140.
[11] 王满,吴功平,熊一飞,等.巡检机器人自动上下线系统制动装置研究[J].机床与液压,2020,48(9):1-4,15.
[12] 卢万杰,付华,赵洪瑞.基于深度学习算法的矿用巡检机器人设备识别[J].工程设计学报,2019,26(5):527-533.
[13] 罗宇亮,沈洁.智能机器人巡检系统在输变电工程中的应用研究[J].电测与仪表,2020,57(23):17-22.
[14] 刘明春,张葛祥,黄占鳌,等.基于深度学习的变电站巡检机器人道路场景识别[J].科学技术与工程,2019,19(13):163-168.
[15] 陈浩龙,李擎,郑耿峰.基于荧光磁粉裂纹探伤的图象识别装置设计[J].电子设计工程,2020,28(2):121-125.
[16] 何健,胡宏宇,徐波.室内巡查挂轨机器人轨线智能跟踪方法研究[J].电子设计工程,2019,27(8):63-66.