透空格栅鱼巢排水下抛投控制
2022-04-18郭素明
王 峥,郭素明
(1.上海交通建设总承包有限公司,上海200136;2.中交上海航道局有限公司,上海200002)
国家大力发展长江经济带的战略效果显著,但由于工程建设引起局部地区水体交换能力变弱、水流流速降低,造成了水域浮游动物、鱼类及其他处于食物链顶端的水生生物生境的变化[1],许多自然江河的原始水域生态及环境遭到了不同程度的改变[2],对水下生物特别是鱼类的栖息和繁衍造成了巨大影响。长江干线武汉—安庆段6 m水深航道整治工程Ⅲ标段在生态涵养试验区采用新型薄壁预制构件透空格栅鱼巢排,是在长江大保护的理念下,采用工程措施将河流系统内部的生物、水体及土壤三者重新组合的新型工艺,可以在保砂的基础上通过维持水体与河床间的连通达到对水下微生物环境进行改善的目的,实现生物与环境的相互涵养。像透空格栅鱼巢排这类小尺寸结构,在投放过程中不可避免地将面临由水流引起的复杂水动力荷载,鱼巢排的漂移对于控制施工成本及精细化施工均会产生负面影响,由于漂移作用,使得鱼巢排进入水下后产生侧翻、旋转及着地偏移等现象,导致鱼巢排着床后局部堆叠、构件间距参差不齐、局部构件碰撞破损等,这对水域的保砂促淤以及生态涵养区水下微生物环境的再次生成产生不利影响。因而有必要对这类结构的漂移进行合理的估计,进而控制施工质量和施工成本。对于抛石一类极小尺度的规则结构,韩海骞等[3]和李小超等[4]结合Morison方程给出了抛石漂移距的半解析结果并通过模型试验对其进行了验证。对于鱼巢排,由于尺度更大、结构更复杂,因此结合Morison方程对其运动过程直接进行数值求解,并在现场观测的基础上验证模型,结果表明计算模型可以对鱼巢排投放过程中的漂移距进行合理估计。以本文的计算模型为基础,可将其推广至预测大部分水流条件下、任意规则形状结构漂移距,进而控制施工成本和施工质量,指导精细化施工。
1 工程概况
工程主要分布在湖北省鄂州市戴家洲水道、湖北省黄冈市鲤鱼山水道及江西省九江市张家洲水道,施工区域总跨度约150 km。工程建设内容主要包括:整治工程、生态工程、建设期维护工程、航标及配套工程、临时工程以及生态涵养试验区。工程建设标准为6.0 m×200 m×1 050 m(水深×航宽×弯曲半径),部分重点碍航滩段航宽不低于110 m,设计最低通航水位年保证率为98%。
生态涵养试验区采用透空格栅鱼巢排,选择张家洲水道北港凸岸串沟区域进行试点。工程区域内总体按两组大区域进行布局,采用吊放工艺进行布置,每组区域沿横向布置80件、沿纵向布置25件,每组区域总布置数量为2 000件,施工过程中构件间按1 m间隔组成阵列形式,生态涵养试验区共计吊放鱼巢排4 000件、总覆盖面积为3.6万m2。
2 工作机理
2.1 地点选择
本次生态涵养试验区试点建设区域的选取主要考虑水域的生态资源与外部条件两方面因素。
2.1.1水域条件
考虑到试验的非典型性,须选取具有足够的覆盖面积且具有一定原始规模生态资源总量的水域环境,同时综合水域环境中水环境系统、土壤环境系统以及生物环境系统三者的完备程度与水域涵盖面积的适配性,要求选取的水域涵盖面积须具有一定规模。
2.1.2外部条件
水域的外部条件主要指保护试点水域的可行性。因此要求试点水域周边人类活动相对较少、试验水域内船舶流量相对较小且周围外界环境相对安静。
综上,将生态涵养试验区位置选取在张家洲水道北港支汊。此支汊形状较长、分流量较为可观,周边居民以农业生产活动为主,支汊所在河段主汊航道条件优势明显,支汊本身通航需求量不大。
2.2 鱼巢排特性和机理
2.2.1结构特性
局部生境改良是生态涵养试验区建设的重要组成环节。本工程采用透空格栅鱼巢排改良局部水下生境,鱼巢排布置在水下环境中,改变了水流形态、增加水体流动性,有利于浮游动植物聚集,为鱼类觅食提供场所[5]。鱼巢排为2 m×2 m×0.5 m(长×宽×厚)的田字形钢混透空格栅,见图1。

图1 构件尺寸(单位:mm)
2.2.2抛投工艺
鱼巢排的吊装施工主要采取运输船,配合装有2台GPS定位系统的浮吊定位船进行抛投。抛投施工前,运输船靠档定位船后,测水深、流速并计算漂移距,然后对定位船进行精准定位。
抛投施工时,浮吊船起吊鱼巢排吊架至运输船舱内,人工将吊架自动脱钩装置安挂在透空格栅鱼巢排的4个挂钩上,确保起吊后透空格栅鱼巢排不会脱钩后,起吊透空格栅鱼巢排,每次起吊1个。浮吊船吊起透空格栅鱼巢排旋转至抛投区域,并根据吊机抛投一侧甲板上的定位刻度标记确认抛投点。操纵吊机,待透空格栅鱼巢排贴近水面时,操纵脱钩开关,完成鱼巢排抛投。一次抛投完毕后,提升吊车钢丝绳,收回吊架至运输船舱内,继续挂钩,准备进行下一次抛投。
该结构投入水下后,具有较为稳定的着床效果,该水下结构在具备一定的保砂能力的基础上,通过中部的空腔可以保持水体与河床之间的有效连通,格栅结构及结构面层在水下原生环境作用下,可以为水下生物、植物提供稳定的附着环境,也可蓄积或绑扎水中的树枝、芦苇,从而能够在空腔内形成局部缓流,促进局部微生境改善。水中的树枝、芦苇或附着藻类在逐渐降解或更新换代的过程中也可一定程度上提升河流近底生境的初级生产力。
3 抛投质量分析
鱼巢排作为生态涵养试验区的重要组成部分,其施工质量是决定试验成功与否的关键。实际现场施工的经验表明,除预制质量控制外,安放过程中的质量控制显得尤为重要。鱼巢排在吊安施工过程中要考虑船舶吃水、安全距离以及构件高度尺寸等因素,受水位影响较大。另外张家洲北港支汊船舶流量较少,本身支汊分流量有限,其航道高低起伏不均匀。经过对测图的分析,综合考虑控制生态试验区施工水深在10~12 m,局部深水区可达到14 m,因此水流会对水下自身质量较小、且断面面积较大的薄壁型预制构件的精准安放产生较大影响。
3.1 抛投参数验证
3.1.1漂移距公式
构件起抛点与着落点之间的水平距离称为漂移距离。漂移距经验公式反映流速、抛高、水深、不规则的块石形状及块石质量等因素对抛石漂距的影响;同时,考虑水流流速在垂直方向分布的基础上,通过分析块石在动水状态中的受力特点,推导出水上抛石漂移距离计算公式,并将其现场观测数据、计算结果和模型试验数据三者进行比较,最终验证合理。
研究表明,其主要影响因素是构件在动水作用下在下沉过程中受到水的阻力;同时也受水流流速的冲击,因而下落过程中将产生漂移。而鱼巢排截面厚度仅为长度的1/20,且侧面面积占比较大,因此在沉放过程中会由于水流影响产生显著的横向漂移。施工过程中需要根据现场测定抛投区的水深和流速,进一步根据公式计算和现场试验综合确定透空格栅鱼巢排漂移距。
根据经验公式,鱼巢排抛入水中,在着落河床之前,在水流作用下,漂移距离Ld与流速v和水深H成正比,可用理论漂移距经验公式(1)进行估算,并通过现场试验综合确定。
Ld=0.74vHW-1/6
(1)
式中:Ld为漂移距离(m);v为表面流速(m/s);H为水深(m);W为鱼巢排质量(kg)。
3.1.2横流力侧翻
透空格栅鱼巢排入水后会受横向水流力推移、重力作用和水浮力作用,在鱼巢排入水姿态不平衡的情况下,构件极易发生倾覆、侧翻,此现象在构件进行水上脱钩时较为明显。为了避免构件倾覆侧翻现象的发生,施工中选择送件入水、水下脱钩的施工方式。水下脱钩方式的最佳情况为将预制构件直接沉入水底,待着床后进行脱钩操作,此时鱼巢排的定位控制最为精准。考虑水深、流速等因素,该方式的安全隐患较大,因此施工过程中需根据水流横向力作用计算出最佳入水距离,在避免安全问题的基础上尽可能减少倾覆、侧翻等现象的发生;同时,抛投位置点对鱼巢排的实际漂移距离有直接影响。构件入水后受到重力、浮力及水流横向力影响,抛投位置越低、抛投初始速度越大、构件沉入水底时间越快,则构件在水流作用下的横向推移距离也就越短。
3.1.3经验公式与力学计算漂移距对比
鱼巢排漂移距经验公式(1)的推导中假定鱼巢排投放过程中具有恒定的垂向下落速度,并通过Morison公式估计垂向水流力,同时经验公式假定漂移过程中的水平速度始终与水流速度保持一致。对于抛石投放这类问题,该假定具有一定的合理性,即相对水深较大、结构尺度较小的结构经历短暂的过渡后快速进入稳定状态与当地水流同步运动。但对于鱼巢排这类尺度较大的结构,由于相对水深并不大,因此,漂移过程中的过渡阶段不可忽略,即鱼巢排自投放至触底的过程中相当长的时间内其运动与当地水流并不同步,因此有必要对漂移过程进行更为精细的分析。相比于经验公式(1),一方面可以获得鱼巢排的漂移距;另一方面通过对鱼巢排运动过程的时域直接求解,鱼巢排漂移过程中的运动曲线可以方便地获得。图2为鱼巢排受力分析。
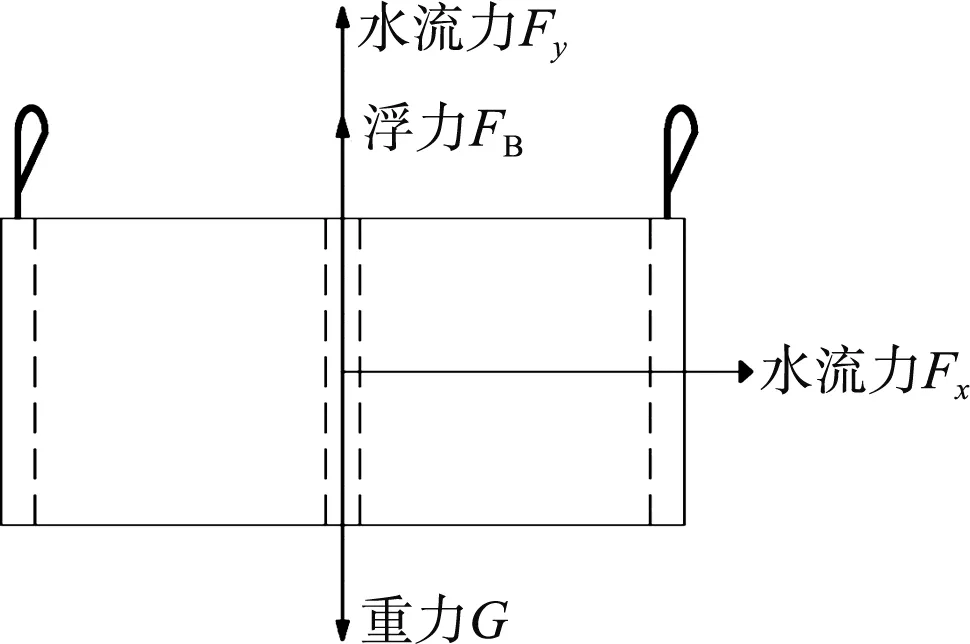
图2 鱼巢排受力
根据图2,透空格栅鱼巢排入水后主要受到重力G、浮力FB及水流力Fx、Fy作用,采用Morison公式估计水流力,通过改变唯一变量——水流速度,在同等情况下对比计算数据与经验公式数据,从而计算出准确的漂移距,保证施工定点抛投的精准度。Morison公式[6]如下:
(2)
式中:F=(Fx,Fy)为鱼巢排所受水流力合力;ρ为水体密度;V为浸没水中的体积;U为水流流速;Uc为质心速度;CM为惯性力系数;CD为拖曳力系数;A为迎流面积,由于鱼巢排中间透空,迎流面积应按侧面积的3倍进行选取;U为投放过程中的水流流速,取结构质心处的水质点速度;dU/dt为水质点加速度,对于本文涉及的均匀来流工况,该项取值为0;Uc、dUc/dt分别为结构质心的速度矢量及加速度矢量,经验系数CM、CD可参考海港规范进行选取并根据具体工况适当调节。
在通过Morison公式对水流力进行估计的基础上,通过牛顿第二定律对结构的运动过程进行时域求解:
(3)
式中:XC=(XC,ZC)为质心坐标;G=(0,-G)为重力;FB=(0,FB)为浮力;M为质量。求解过程采用二阶精度中心差分[7]对加速度项进行离散,对鱼巢排位移进行数值积分。鱼巢排Z向触底时程序终止,并将此时鱼巢排X向位移作为漂移距输出。需要指出,由于Morison公式中隐含了未知的结构质心加速度,因此实际求解过程中需将Morison公式中的惯性力与结构自身惯性力进行合并,即将Morison公式的惯性力项移至等式左端进行计算。另外,本文涉及的流速与水深、鱼巢排的转动效应与侧向运动并不显著;同时,施工过程中往往需要通过投放过程的精准化操作避免鱼巢排侧翻,因此求解过程中并未考虑结构转动及侧向漂移的影响。
在具体实施过程中,为保证数据的可靠性、实用性及普遍性,将生态涵养试验区平均划分为8块区域,从中选取6个区域,每个区域随机抽取6组数据,共计36组数据,计算对比透空格栅鱼巢排抛投漂移距。36组数据的Morison计算偏移距与理论计算偏移距的数据与水深变化关系见图3。
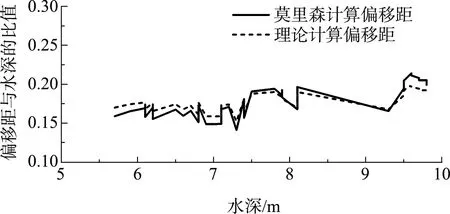
图3 Morison计算偏移距和理论计算偏移距水深比
将Morison计算实测值和理论计算偏移距做差值,并结合流速变化制作成图4。根据图4曲线分布,本次试验区域的Morison实测计算与理论计算偏移差数据趋势较为集中,比值基本在-0.01~0.02波动,并随水深改变而呈现一定变化规律。不难看出,在水深较浅的区域,Morison计算数值与理论计算数值比较接近,在施工过程中可做小幅适时调整以满足施工精度要求;在实际施工过程中尤其是在水深超过7.5 m后,正负值的变化逐步增大,须根据实际情况结合区间计算结果的中间值作为偏移修正值,附加在理论漂移距计算公式后进行二次对比修正,保证吊安薄壁构件过程中能够准确定点安放,消除横向水流带来的漂移偏移差。
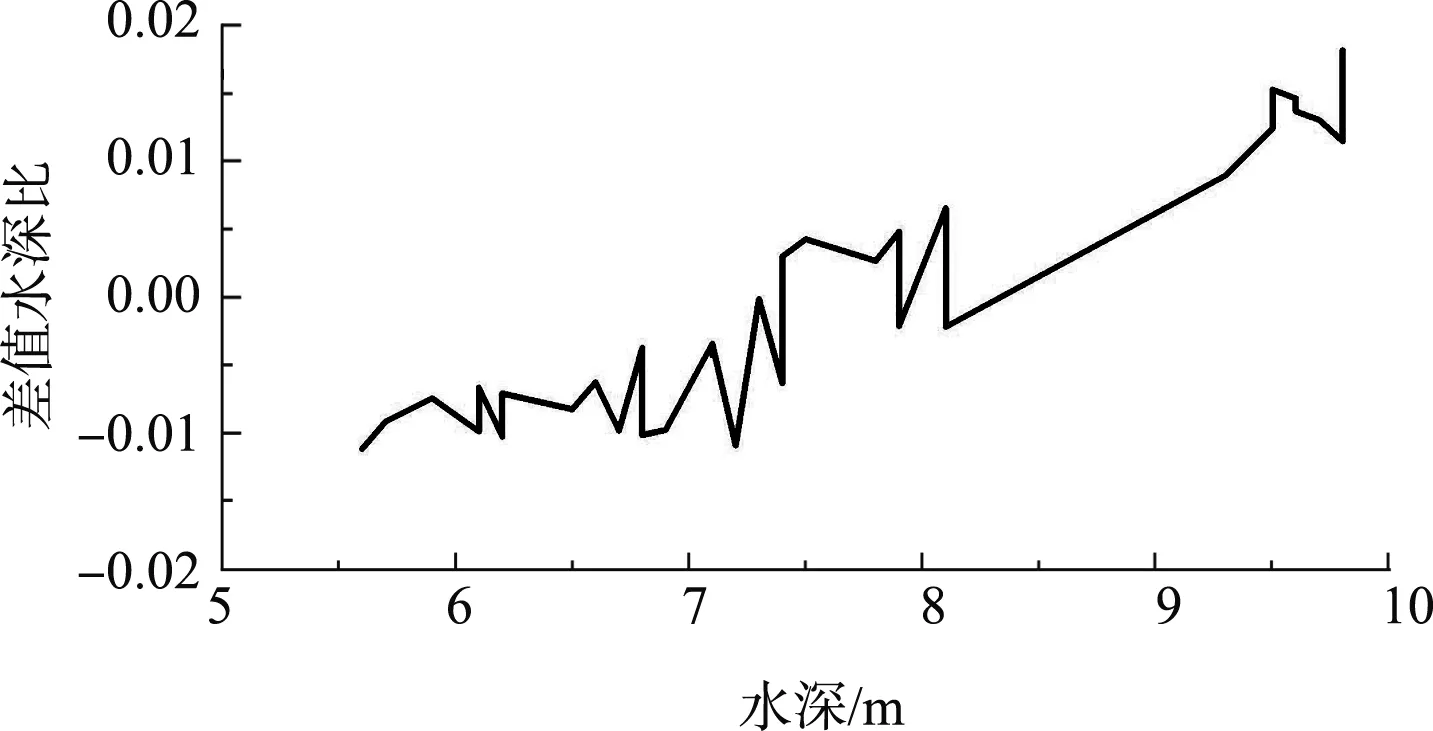
图4 Morison和理论偏移差值水深比
综上,在水深、鱼巢排构件自身质量以及浮力不变的情况下,对比力学计算与经验公式的漂移距离,可以看出,在水深10 m以内理论漂移距比实算漂移距相差-7.07%~8.88%,并且以水深7.5 m为界随着水深的增加偏移距差距逐渐由负转正,并存在一定变大趋势。因此在施工过程中,可根据精度要求进行适当偏移,偏移距离建议在原经验公式的基础上根据实测值乘以安全系数5%~10%,并判断方向,以保证抛投的精确度。
3.2 吊具制作
透空格栅鱼巢排的抛投最初采用传统鱼巢砖吊具,吊具自身质量大、过于笨重,起吊过程中鱼巢排吊具方向控制困难,因此抛投点位置、方向难以控制,操作不便且存在一定安全隐患。
经过研究改良,新吊具主骨架仍然为矩形钢架,其长度3 m、宽度2 m,四角连接吊绳及吊扣,主体框架采用国标14 mm的槽钢焊接而成,框架内加焊槽钢使吊架更坚固;同时对吊钩铁链进行调整,保证其同时受力同时脱钩。新吊具长宽比缩小,其侧面辅助控制方向的钢丝工作效率提升,且稳定性高、操作便捷。针对松脱钩系统的调整,提高吊具各点与构件轮廓形状及主要受力点的切合度,使得预制构件各点受力均匀,保证同起同落,避免在入水姿态扭翻,保证抛投精准度。吊架见图5。

图5 改良吊架
3.3 过程监测
传统GPS定位系统结合网格图可以观测船舶位置及吊架位置。由于生境改造区域平均水深为10~12 m,鱼巢排抛投至着床稳定过程受水流影响较大,因此,精准观测水底鱼巢排着床情况及落点分布是质量控制的重点。
采用声呐监控系统实时对水下情况进行检测。声呐监控系统利用声呐反射原理,将反射信息进行成像反映到屏幕,从而得到实时水下监控。水下监控情况前后效果见图6。
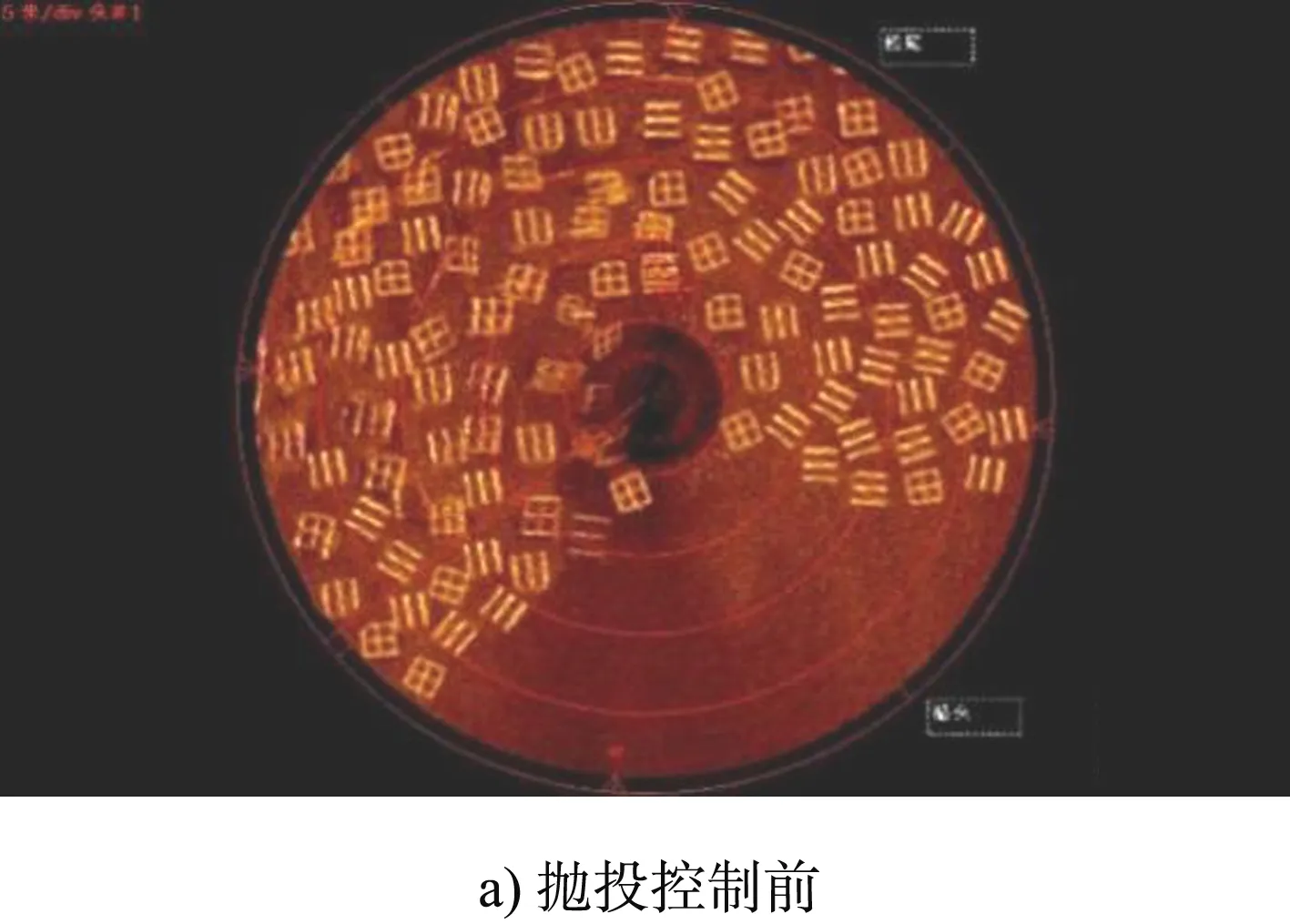
图6 声呐旁扫
将声呐装置安装在船舶抛投侧,可辐射半径为30 m的范围。在鱼巢排施工过程中为保证施工精度吊臂施工范围,根据定位船大小,辐射半径一般控制在10~20 m,因此声呐扫测可完全反映水下鱼巢排着床状态。通过实时监测可迅速反映鱼巢排的着床情况,对受水流影响或地形变化区域可以做到及时调整,以保证施工质量。
4 生态效果
鱼巢排作为一种人工结构对鱼类群和微生物群进行生境改良,可以改变水体的理化环境和生物环境[8],而水体理化环境的改变是新生物区系形成的前提条件。控制鱼巢排材料、投放规模、投放时间和管理等人为因素能保证施工质量,生态涵养试验区域水深、底质、流速等自然因素的选择会影响鱼巢排对鱼类的增殖效果。
鱼巢排在精确布设以后,可以导致大量着生生物、浮游生物生长,为鱼类的索饵行为提供便利;鱼巢排的透空格栅空隙也可以为小型鱼类躲避敌害提供帮助,具有适宜水生动植物繁衍生长的优点[9];同时,小型鱼类的聚集也可吸引肉食性鱼类群体,当鱼巢排水域生态系统经过长时间的稳定后,就可以形成稳定水下生态,对生物多样性和生态系统的完整性修复提供有效帮助。
5 结语
1)薄壁型预制构件在抛投过程中由于构件存在多个规则的纵向面,在水下受水流横向作用明显,基于Morison方程计算与漂移距经验公式进行对比,发现薄壁型预制构件在水中的运动不能简单视为质点运动,要根据水流、水深等因素综合考虑横向水流力。
2)在横向水流力的作用下采用Morison公式与经验公式的数值对比,发现在抛投漂移距控制过程中需要对原始的漂移距经验公式的计算结果进行修正,在水深较浅区域由于下落高度较低,偏差调整值可在10 cm;当水深超过10 m施工水域,Morison公式计算值与经验公式偏差较大,需根据现场实际数值进行二次分析校正经验公式偏移距,从而达到精准抛投控制。
3)新型预制构件抛投过程中应逐一抛投,根据构件自身特点及与水接触结构面形状制作专门的吊装用具,保证构件在抛投过程中各边均匀释放,平稳入水,减少侧翻。
4)深水区域可采用声呐装置实施监控,可有效反映预制构件着床形态,以到达辅助现场预制构件精准抛投施工的作用。