基于卫星编队的杆塔状态在线综合监测系统设计
2022-04-15王宇汪鹏图布信
王宇 汪鹏 图布信
摘 要:為提升杆塔状态在线综合监测的精度,设计基于卫星编队的杆塔状态在线综合监测系统。基于卫星轨道动力学方程和卫星轨道编队方式,采用卫星编队定位技术定位杆塔物理位置,根据在线综合监测装置内置的倾角传感器,实时采集杆塔倾斜角数据,计算杆塔倾斜度,并向CMA传输计算数据,判断综合倾斜度是否超出阈值,在超出阈值时及时预警,并通过GPRS网络将监测数据打包压缩传输至监控中心,实现杆塔状态在线综合监测。实验结果表明,当卫星间距为2 km时,误码率最低,且随着卫星数目的增加,误码率增长缓慢;塔架倾角最大误差仅为0.19°,监测精度高。
关键词:卫星编队;杆塔状态;在线综合检测;倾角传感器;斜度;监测基准站
中图分类号:TM75 文献标识码:A
Design of Online Comprehensive Monitoring System
for Tower Status Based on Satellite Formation
WANG Yu, WANG Peng, TU Buxin
(Inner Mongolia Power Research Institute,Hohhot,Inner Mongolia 010020,China)
Abstract:In order to improve the accuracy of online comprehensive monitoring of tower status, an online comprehensive monitoring system based on satellite formation is designed. Based on the dynamic equation of satellite orbit and the formation mode of satellite orbit, the physical position of the tower is located by using the satellite formation positioning technology. According to the builtin inclination sensor of the online integrated monitoring device, the tower inclination angle data is collected in real time to calculate the tower inclination, and the calculation data is transmitted to CMA to judge whether the comprehensive inclination exceeds the threshold, and the early warning is timely when it exceeds the threshold, Through GPRS network, the monitoring data is packaged and compressed to the monitoring center to realize the online comprehensive monitoring of tower status. The experimental results show that when the distance between satellites is 2 km, the bit error rate is the lowest, and with the increase of the number of satellites, the bit error rate increases slowly; The maximum error of tower inclination is only 0.19 °, The monitoring accuracy is high.
Key words:satellite formation; tower status; online comprehensive detection; inclination sensor; slope; monitoring reference station
伴随着我国卫星导航系统和国家基础增强系统的建设,目前我国已能为全国29个省提供厘米级高精度定位服务[1]。但在电网实际业务应用中,逐步采用自主可控的高精度服务来取代前期 GPS(Global Positioning System,全球定位系统)服务,符合国家战略的大趋势。电力巡线和智能电网运营等业务对高精度位置服务有着强烈的需求[2-5]。所以构建高精度专有服务平台,开发基于平台的高精度应用,可以在很大程度上满足国家战略、企业发展以及电力实际的业务需求[6-7]。
针对这一问题,陈文灿等[8]、侯慧等[9]开发了基于空间多源异构数据的输电杆塔工况在线监测系统,研究了输电杆塔塔脚腐蚀现场实时监测系统,结果表明,该系统能够有效地监测杆塔工况,但检测精度不高,有时会丢失监测目标。
卫星高精度定位相关技术不断推陈出新,比较热门的有星基定位、航测后处理、形变监测、多频定位等,高精度定位业务发展趋势如下:覆盖范围广的地基增强站,大容量接入能力,高精度地图技术,软件定义接收机的 SDR,高精度手机,自动驾驶/辅助驾驶,云端一体化技术。因此,本文提出了基于卫星编队的杆塔状态在线综合监测系统设计方案,并通过卫星编队模型的设计,使杆塔状态在线综合监测系统更加完善。
1 基于卫星编队的杆塔状态在线综合监测系统设计
1.1 系统总体结构
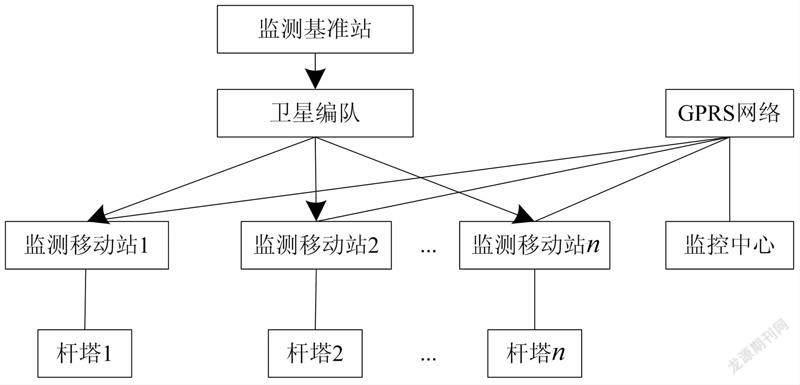
图1中,基于卫星编队的杆塔状态在线综合监测系统包含监测基准站、监控中心以及监测移动站。监测移动台安装在输电塔上。监测基站利用卫星编队定位各塔的物理坐标,并通过射频网络与周边监测移动台共享。通过射频链路接收监控基站的共享位置,对塔台的现场姿态进行监控,并将GPRS(General packet radio service,通用无线分组业务)网络将数据打包压缩到监控中心。利用卫星编队定位技术对塔架进行精确定位,监测塔架的位移状态。为了获取塔架的姿态信息,在监测移动台上设计了在线综合监测装置。采用高精度倾角传感器进行在线综合监测,使管理人员能够及时了解输电线路的运行状况[10],尽量避免因铁塔位移、倾斜、下沉等引起的事故,实现输电线路的数字化、自动化管理。
1.2基于卫星编队的杆塔定位
1.2.1 轨道动力学方程—道动力学方程
Hill方程即参考星与伴随星之间的相对运动方程,当存在外界摄动影响时,假设参考星的半长轴大于伴随星与参考星距离,在航天器质心轨道坐标系下,Hill方程表示为:
公式(1)中,其他作用力具有合理的加速度(伴随星与参考星除地球中心引力以外的),在轴上的分量依次用fx、fy以及fz描述。
由于监测基准站采用卫星编队实现杆塔的定位,卫星基线长度以及基线的测量方式都可以由卫星编队方式决定,不同的编队形式,产生不同的摄动影响,为减小摄动影响,需选择比较稳定的编队方式,因此,设质心轨道坐标处于原点位置,保证Hill方程在外界摄动影响下,不被修改,Hill方程转换为:
1.2.2 编队轨道设计模型
水平编队、空间圆编队、沿航向编队以及串行编队是卫星编队中常用的四种编队飞行方式。其中,最简单的一种方式是串行编队方式,这种方法是指参考航天器和伴随航天器按一定顺序在同一轨道上运行,具有运行稳定的优点[11-13]。
此刻,Hill方程在相对运动特性退化为固定点时,可表示为:
公式(3)中,y0为初始条件。
1.2.3 编队卫星相对定位的RDOP描述
相对定位精度衰减因子(RDOP)是基于几何精度衰减因子(GDOP)概念提出的。目前,铁塔状态在線综合监测系统通常采用“时测距离”的定位监测方式。当单点定位或绝对定位开始时,精度衰减系数和用户的等效测距误差可以同时确定其精度[14]。DOP可以反映导航卫星的空间几何分布,即获取低轨卫星和导航星座的轨道参数。
在绝对定位中,当导航卫星m颗可见,可以线性化处理非线性伪距观测方程,表示为:
公式(5)中,xj,yj,zjTj=1,…,m表示低轨卫星的星载荷接收机概略位置与卫星j之间的单位方向矢量,LOS(Line of Sight)表示伴随星与参考星矢量距离
将元素全是1的m维矢量设为em,m颗导航卫星LOS矢量建造的矩阵设为Am,则:
Hm=Am,…,em(6)
需要了解某一个接收机的绝对位置,确定实际的相对定位,设A为接收机,若在同一时刻获得测量,为获得双差方程,将其中的第m颗卫星当作参考卫星,可得公式为:
通过公式(8),可将DOP求解出来:
公式(9)中,下标DD表示双差,tr(°)表示矩阵的迹。因为钟差被双差消除,所以,相对的时间精度衰弱因子并不存在。
1.3 杆塔状态在线综合监测装置
1.3.1 硬件设计
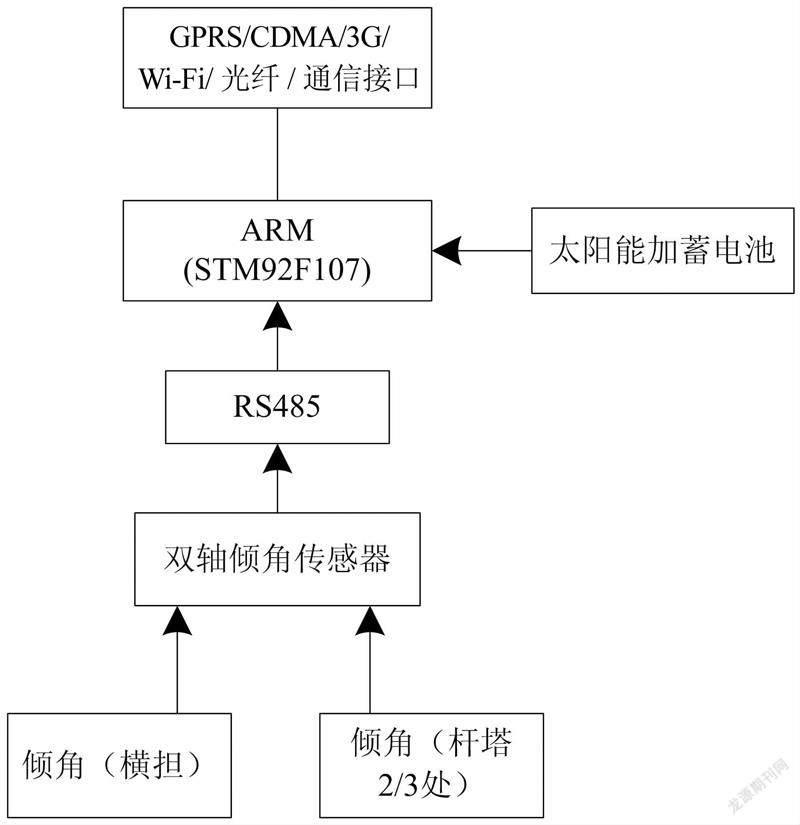
为了获取倾角传感器监测倾斜角数据,设计了塔架倾斜角监测装置计算塔架倾斜角,并将数据传输给CMA(模块化平台)。该装置的组成如图2所示。
图2中,杆塔状态在线综合监测装置主要包括控制单元、电源、RS485通讯和倾角传感器。在塔架2/3的横担上安装了两轴倾角传感器,可以采集垂直和水平方向的倾角,并通过RS485传输给系统控制单元。对于采集到的倾斜角,控制单元通过塔架倾斜角计算模块计算出塔架倾斜角,然后将计算结果发送给CMA,传输过程中采用GPRS/CDMA/WiFi/3G/光纤通信网络。
1.3.2 软件设计
(1)杆塔倾斜度计算原理
在系统中,在2/3杆塔高度处及顶部安装双轴倾角传感器,实现全天候、实时监测高压运行中的杆塔横向角以及顺向角,对于综合倾斜度G,采用空间直角坐标系进行计算,并存储在主控制器中。
通过G描述综合倾斜度,Gt描述横向倾斜度,Gd描述顺向倾斜度,由如下公式(10)、公式(11)、公式(12)表示:
当不同杆塔的高度不同时,H与杆塔允许倾斜度的乘积是其最大允许倾斜范围。当计算得到杆塔综合倾斜度G后,可对各杆塔综合倾斜度G的报警阈值、预警阈值、提示阈值、正常值进行设定。
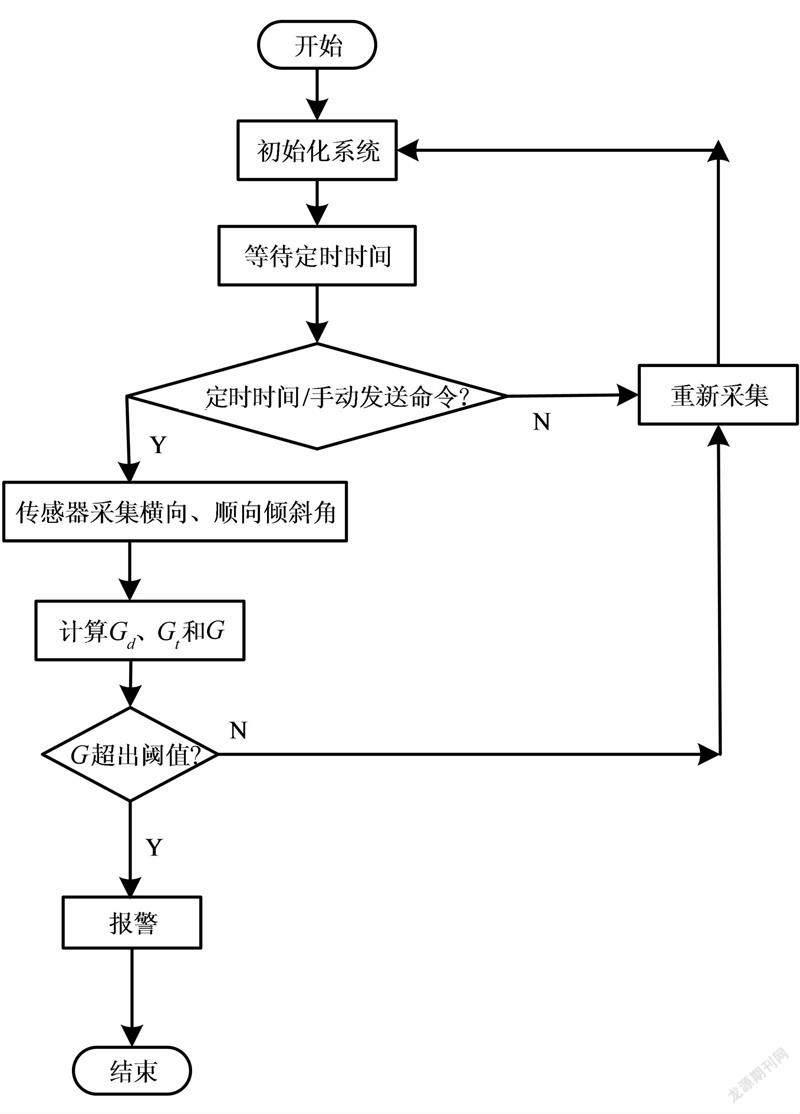
(2)软件流程图
为使系统的功率损耗降低,设定手动或定时形式对数据进行采集[15]。当到达设定事件时,倾角传感器向系统控制单元传送顺向倾角与横向倾角数据,并计算顺向倾斜度与横向倾斜度,判断综合倾斜度G是否超出阈值,依据判断结果,决定是否执行报警。
2 实验分析
为分析本文系统的性能,将本文系统应用于某电网公司中,对该公司管辖区域内的杆塔状态进行在线综合监测。
系统正式应用之前,对系统的功能模块进行测试,分析具体功能是否正确运行,是否达到预期的假设。测试结果如表1所示。
根据表2可知,通过该系统的实时监测数据,可以看出7号线3号线杆水平摆动倾斜度在7级风力情况下最小,沿线摆动变化略大于水平摆动的变化,而在9级东南风力情况下,5号线杆的摆动倾斜度最大。
在卫星间平均距离分别为2 km、4 km、6 km三种情况下,对本文系统的误码率进行分析,分析结果如图4所示。
由图4可知,在不同卫星间距离的情况下,随着卫星个数的增加,误码率上升,当卫星间距离为6 km时,本文系统的误码率最高,卫星距离为2 km时,本文系统的误码率最低。
选取文献[8]的输电杆塔塔脚腐蚀现场实时监测系统、文献[9]的基于空间多源异构数据的台风下输电杆塔监测系统作为本文的对比系统,分析误码率与卫星个数的关系,分析结果如图5所示。
由图5可知,随着卫星个数的增加,不同系统的误码率也随之增加,但本文系统的误码率始终低于文献[8]系统与文献[9]系统。
通过设定标准角度,对不同系统所监测的杆塔角度误差进行分析,分析结果如表3所示。
分析表3可知,不同系统监测到的杆塔倾斜角度存在的误差不同,文献[8]系统的最大误差为0.47°,文献[9]系统的最大误差为0.66°,但本文系统的最大误差只有0.19°,同时,本文系统所监测的角度误差始终低于文献[8]系统与文献[9]系统,因此,本文系统的监测精度可以满足对杆塔状态在线综合监测的需求。
3 结 论
设计了基于卫星编队的杆塔状态在线综合监测系统,该系统应用在线综合监测装置内置的倾角传感器实时采集塔架倾角数据,当综合倾斜角超过阈值时,及时预警,将监测数据打包压缩,通过GPRS网络传输至监控中心,实现对铁塔状态的在线综合监测,有助于技术人员在第一时间掌握输电塔的运行情况,在发生意外时及时并准确地对其进行抢修。
参考文献
[1] 潘三明,袁明强. 基于边缘计算的视频监控系统及应用[J]. 电信科学, 2020, 36(6):68-73.
[2] 兰五胜, 徐伟强, 毛丽娜,等. 基于串行总线同步的氧化锌避雷器在线监测系统设计[J]. 电瓷避雷器, 2020, 295(3):115-119.
[3] 杨慧欣. 基于循环追踪控制的卫星编队构形调整控制律设计[J]. 航空学报, 2020, 41(S2):181-186.
[4] 杨盛庆, 叶文郁, 何煜斌,等. 基于势场法的卫星编队保持及其稳定性分析[J]. 系统仿真学报, 2019, 31(2):332-338,345.
[5] 王祖武, 韩军, 孙晓斌,等. 基于视觉导航的输电线杆塔方位确定方法[J]. 激光与光电子学进展, 2019, 56(8):126-134.
[6] 杨知, 欧文浩, 费香泽,等. 基于高分辨率SAR影像和深度学习的输电杆塔智能识别研究[J]. 电测与仪表, 2020, 729(4):76-82.
[7] 周文峰, 杜志叶, 张力,等. 地质灾害对超高压输电线路杆塔杆件失效影響分析[J]. 电测与仪表, 2020, 732(7):21-27.
[8] 陈文灿,孟晓波,张海鹏,等. 输电杆塔塔脚腐蚀现场实时监测系统的研制[J]. 高压电器, 2020, 381(12):201-207.
[9] 侯慧, 于士文, 肖祥,等. 基于空间多源异构数据的台风下输电杆塔风险评估[J]. 电力系统自动化, 2020, 44(10):127-134.
[10]马强, 侯立群, 李占军,等. 基于优化算法的千伏输电线路复合横担杆塔通用结构研究[J]. 中国电子科学研究院学报, 2019, 14(4):436-442.
[11]杨博, 王浩帆, 苗峻,等. 基于卫星编队的空间碎片视觉高精度导航方法[J]. 中国空间科学技术, 2019, 39(1):40-48.
[12]程亮, 刘爱芳, 穆冬,等. 编队卫星InSAR三同步技术地面验证系统设计研究[J]. 微波学报, 2019, 35(5):61-66.
[13]侯锐, 张驰, 苗峻,等. 基于蝙蝠飞行的仿生智能卫星编队管理策略[J]. 空间控制技术与应用, 2020, 46(2):22-28.
[14]赵娟, 白春, 胡亚辉,等. 基于北斗卫星的船载无人机惯性导航定位系统[J]. 舰船科学技术, 2020, 42(8):143-145.
[15]陈强, 王建, 熊小伏,等. 一种降雨诱发滑坡灾害下输电杆塔的监测与预警方法[J]. 电力系统保护与控制, 2020, 549(3):153-161.
