挖掘机智能引导系统在离岸式防波堤施工中的应用
2022-04-13聂洪斌
聂洪斌,杨 源
(中交四航局第二工程有限公司 广州 510230)
0 前言
防波堤理坡作业是按照设计图纸要求,通过陆上堆填、抛石、挖机梳理等方式将边坡标高修整至设计边坡高程的一种水上或陆上施工作业。边坡作业完成后若干块石之间出现空隙、密实性不紧密、坡面平顺度不合格、上下层块石搭接不连续等情况,就会形成局部坡面不稳定和影响扭王字块护体结构安装,影响主体防护结构安全。一般而言,对于陆上理坡作业,挖机操作手能够看得见的坡面块石是比较容易施工的;而对于大面积水下不可见的块石边坡而言,则传统施工工艺难以满足设计要求,需要选择适当的工艺进行处理。针对水下边坡作业不可见,施工难度大,特别是防波堤护面块石垫层处理,由于涉及到大规模扭王字块体安装防护重要结构部位的安全和稳定性,水下边坡施工质量应该慎重考虑[1]。本文主要介绍了防波堤边坡护面块石防护结构的施工工艺选择、施工过程中设备的选择以及施工过程中定位、测量、校核、验收等内容,总结了施工过程中的要点,为外海防波堤水下边坡理坡施工技术人员提供一定的经验参考。
1 概况
1.1 工程概况
某港口城项目位于印度洋沿岸,离岸式防波堤总长约3 245 m,如图1 所示结构为斜坡式抛石防波堤,设计堤顶标高为+4.0 m,顶部宽度为9 m,具有设计断面宽度窄、堤顶标高低、施工难度及强度大等特点。每年4 月~10 月为当地季风期,风向、海浪变化频率高,海浪主波向转为西南方向,防波堤施工难度进一步加大,堤身结构安全稳定更是面临巨大的挑战[2]。
图1 离岸式防波堤结构Fig.1 Structural of Offshore Breakwater
1.2 施工特点与难点分析
⑴海域水深,防波堤原泥面高程-14 m~(-20)m;
⑵水下施工工序多,目前本工程最大型长臂挖掘机在陆上施工范围只到坡面-8 m 处且水下作业不可控,坡面块石垫层难以按设计和规范要求理坡成型,影响到扭王字块安装质量;
⑶坡面长,设计允许坡面成型偏差±40 cm,海岸两侧坡面总长88.6 m,其中设计低水位正0.1 m 以下护面长31.2 m,该段护面扭王字块需水下安装,块石坡面质量直接影响扭王字块安装质量;
⑷常年受风浪、涌浪,特别是季风期风浪影响严重,堤芯石料流失量多,工序返工频繁,功效低,边坡工程量大,理坡进度难以保证;
⑸一般地堤心石暴露长度不宜大于50 m,进度衔接紧凑,施工过程中要求各道工序质量控制高,尽量减少返工,及时形成一定的防风防汛能力,确保堤身结构安全;
⑹验收标准同时采用英标、美标、欧洲标准以及国标,按严格者执行。
1.3 施工方案的确定
本工程最外侧的扭王字块压脚块石抛填成型质量,直接影响第一排扭王字块安装的质量以及整体结构稳定安全,普通挖掘机无法陆上超远距离理坡,采用传统式水上船机理坡又受风浪及水下不可视限制,施工盲目性大,设备及挖斗磨损严重,质量、进度、成本均无法得到控制。因此,通过调研比选采用将GPS定位智能引导系统安装在长臂挖掘机上引导施工,实现可视化理坡为最佳方案,陆上和水上均能满足挖掘机作业条件,经比选后确定定制臂长26 m 的挖掘机,能满足以下施工要求[3];
⑴陆上理坡最深作业范围-8 m,水上理坡最深作业范围-15 m,施工全程可视化,提高施工效率和质量,满足施工要求。在同一段坡面理坡时,应先由水上挖机完成水下至坡面-8 m处理坡,再由陆上挖机接着水下-8 m至水上坡面理坡,理坡顺序应由边坡横向外侧往内侧、从坡脚往坡顶循序渐进,确保块石之间接触紧密、水上陆上施工紧密搭接,以防止护面块石下滑;
⑵ 经比选测试挖掘机引导系统测量定位精度为±5 cm,满足设计坡面施工允许误差±40 cm 精度要求;传感器的采样频率20 Hz/s,远远大于外界因素(如海浪、震动、船舶摇晃等)干扰,可以实时调整挖掘机姿势,满足挖掘机在陆上行走和水上船舶作业;
⑶对设计防波堤顶窄,临时施工便道窄,路况及地基承载力适当性强;
⑷分层分段理坡,不受风浪、潮水、不可视因素等影响作业,质量可控,成本低,施工高效,进度有保障。
2 智能引导系统的引入
2.1 系统简介
某国外公司专门针对挖掘机水下工程作业,开发的智能引导系统,采用全球卫星定位监测技术与丰富的设计控制软件相结合,通过建立数字化设计基准模型,在无法通过视力观察到的水下作业面,机手也能通过系统控制箱屏幕显示的引导信息让水下铲斗末端位置随时可见,控制铲斗精确完成工作。挖机斗杆及铲斗都是接触大块石硬物的频繁点,系统上的传感器和线揽有金属外壳保护,具备自我防护和防水防震功能,完全适应水下挖填大块石头理坡,同时该系统应用范围广泛,包括水利设施水下清淤、河道修整施工;河道、沟渠及堤坝边坡修整施工;预埋输油管线土方开挖施工;公路、铁路建设基坑开挖、边坡修整;城市市政污水管网开挖施工等[4]。在现场无需测量放样的情况下,可以精确完成多种坡度、深度以及防波堤横断面轮廓的坡面修整挖掘工作,系统精度能达到±5 cm,能够实时查看到是否存在漏挖或过挖,避免返工和浪费工时,提高了机械施工精度和效率,节约施工成本。
2.2 工作原理
智能引导系统,采用GPS 实时动态定位控制技术,实时、准确获知挖掘机三维位置[5];通过读取安装在挖掘机上的各种坡度传感器(见图2),解算校准过的主要枢轴尺寸,获得铲斗实时、精确的三维位置信息。系统通过比较数字化三维设计基准模型与当前铲斗所处位置信息,以机器模拟图形、数值和声音信号等多种方式指示实际铲斗与目标工作面的相对位置,引导操作手精确施工。施工过程和质量随时在驾驶室内控制箱屏幕显示并在内存中记录竣工图,机手可以实时看到已经完成工作面情况,避免出现漏挖或过挖。
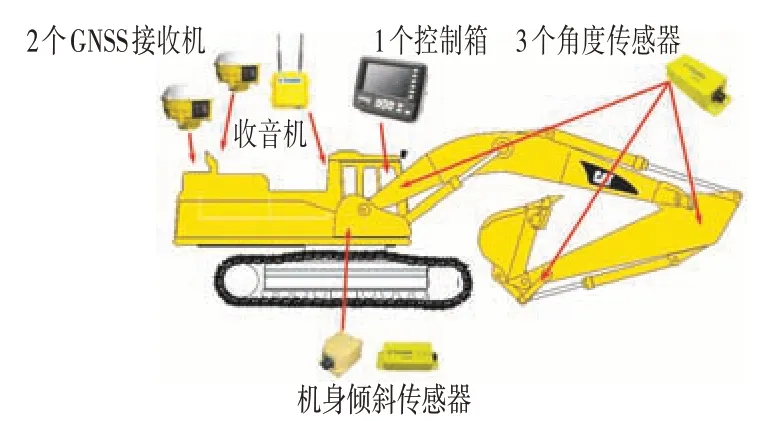
图2 系统的组成部件Fig.2 Component of the System
2.3 系统控制箱设计图管理
2.3.1 设计制作
智能引导系统配备的设计制作软件Trimble Busi⁃ness Center 可安装在电脑上,根据工程设计图纸信息可在软件里输入设计里程、坡比、左右偏距、变坡点里程以及变坡点高程等,软件能快速生成相应的平面图和断面图。
2.3.2 设计导入
通过U 盘或移动硬盘设备可将制作好的设计文件拷贝导入控制箱,在控制箱里可以根据现场施工需要调取相应的设计图纸进行施工。
3 理坡技术
3.1 施工顺序
防波堤护面体系由护底片石、压脚块石、坡面块石垫层、护面扭王字块4块组成,护面体系应与扭王字块安装各项工程施工紧密衔接才能形成稳定整体,共同抵抗风浪[6]。分段理坡,挖掘机智能引导系统可视化实现施工灵活性,纵向理坡顺序由里程方向可随机选点理坡,工作面灵活调整,多台挖掘机可从水上陆上同时进行作业,解决因等机位施工导致工作面不足的被动局面;横向理坡顺序由外侧往里侧,即由水下到水上,循序渐进。堤头段内外两侧护面块石的稳定性要比堤身外坡差,主要因为越过堤头的波浪破碎水流将直接把护面块石从堤上向外推,而比波浪对堤身护面块石的作用强,所以堤头段进行加强处理。
3.2 施工流程
护底块石抛填➝一级棱体石料抛填➝一级棱体内侧倒滤层片石抛填➝压脚块石抛填理坡➝堤芯石抛填➝水下坡面堤芯石垫层梳理➝水下护面垫层块石抛填理坡➝水上护面垫层块石抛填理坡➝水下坡面扭王字块安装➝水上坡面扭王字块安装。
3.3 理坡方式
理坡方式分为陆上理坡和水上理坡两种。陆上作业受横向坡长距离、水深等因素影响,理坡最大深度只能到达坡面-8 m 处,而因设计堤顶宽度窄、临时施工便道宽度局限性,若全部挖掘机都在陆上施工的话造成施工道路堵塞,影响交通车、石料运输车过往,陆上堤芯石料推填、扭王字块安装等工序均无法进行,影响工程进度;水上理坡挖机作业则不受陆地交通和陆地平台条件制约,可灵活运用船舶甲板平台或移船方式调整挖机工作面,移船只需要通过操作船舶卷扬机松卷锚缆方式快速达到目的,通过水上移船方式调整作业面比陆上挖机行走方式调整作业面的工作效率要高得多,正常一次移船最大能满足45 m长的边坡工作面施工,且引导系统能适应海上风浪条件,实时调整姿态并显示理坡信息。因此,结合陆上挖掘机实际最大作业距离,以设计坡面-8 m为界护面垫层块石-8 m 以上为陆上理坡,采用挖掘机在陆上堤顶理坡;水上理坡采用船机甲板作为施工平台,指挥挖掘机开上甲板施工,施工过程中需考虑船舶吃水深度以及船舶与边坡的安全距离,本工程坡面水下-15 m 以上至坡顶的边坡均能从水上理坡,弥补了陆上挖掘机长距离作业受限的不足。理坡顺序应由边坡横向外侧往内侧、从坡脚往坡顶顺序推进,确保块石之间接触紧密、水上陆上施工紧密搭接,以防止护面块石下滑。
3.3.1 陆上理坡
陆上理坡采用智能引导系统挖掘机在堤顶作业,挖臂垂直于防波堤纵轴方向,如图3所示,由外侧往里侧,即由水下-8 m 往水上坡顶横向理坡,纵向前后推进顺序。
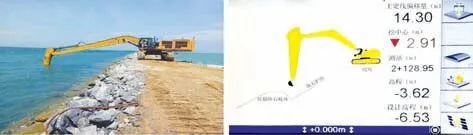
图3 陆上理坡Fig.3 Land Slope Triming Image
⑴理坡前,操作手需认真检查智能引导系统硬件是否牢固安全。如传感器有无松动、水密性是否完好、GNSS 接收机和电台有无松动、线缆是否完好等,如有问题及时处理,确保系统设备硬件安全,做好每天的设备安全排查记录。如需在挖掘机上进行焊接作业,必须确保系统总电源为断开状态,避免线路过电烧坏硬件设备致使系统瘫痪;检查完硬件之后,打开系统控制箱电源进行数据测试,如GPS 信号是否正常、传感器连接状态是否正常、边坡设计图是否正确等,如有问题及时通知测量专业技术人员进行处理;
⑵开始理坡,操作手操控挖掘机,用斗齿以点触碰形式探摸坡面,以获取该点位的实际标高,通过观看系统控制箱实时显示的坡面设计线、实际高程与设计高程差值,即填挖量,正偏差为填,负偏差为挖,以及相应的里程桩号、偏距等信息引导理坡,理坡过程中适当调整块石间的接触面和角度,逐点拍打检查以密实块石之间的空隙和块石垫层的整体牢固性;
⑶根据智能引导系统,操作手在探测到边坡块石欠方时,应记录欠方位置以及欠石方量,然后从陆上备料区挑选1~3 t 规格块石随挖斗进入水下送至边坡欠方位置抛填,哪里欠高填哪里,哪里超高挖哪里,减少水深、水流和波浪等自然条件对块石产生漂流的影响或滚落到其他位置去,达到精准理坡;超方反挖时应考虑块石滚落以及扰动相邻两侧坡面块石的稳定性,勤用挖斗拍打检查以密实临边块石之间的空隙,确保坡面块石垫层的整体稳定性、顺平性;
⑷牢固的块石垫层能保护堤芯石不被风浪“抽走”,又能保护自身不会因扭王字块空隙大而被风浪“抽走”,从而确保了扭王字块基础面的稳定性。块石垫层的牢固需建立在堤身的稳定、水下坡脚、护底的抛填到位,垫层块石间相互挤密[7]。
3.3.2 水上理坡
水上理坡采用智能引导系统挖掘机在船舶甲板上作业,挖臂垂直于防波堤纵轴方向,由坡脚往坡顶方向进行,通过船舶移位调整挖掘机作业工作面。
⑴待方驳或自航驳靠码头,在甲板料仓上备好石料,指挥挖掘机开上甲板安全位置;如需要远距离临边作业时,需在船舶甲板上指定挖机作业位置,焊接挡板以固定挖掘机双腿保证设备安全,准备工作完成后,将船移至施工位置,抛锚定位开始理坡。对于直线段边坡,一个船位最大能满足45 m 长理坡工作面;而对于圆弧段边坡则根据圆弧大小控制工作面,一般单次调整船位能满足施工作业面不少于10 m。
⑵挖掘机水上作业因船舶受水流、风浪等自然条件影响,随船舶漂浮摇晃不定,智能引导理坡系统发挥的作用更为突出,系统实时提供挖掘机位置信息,引导操作手准确理坡。
⑶水下压脚块石棱体的理坡质量相当重要,关乎到坡面垫层石的稳定性以及扭王字块体安装的质量和安全稳定性,水下第一排扭王字块安装必须紧靠水下压脚块石棱体,以防止护面块体下滑造成护面层“拔缝”[8]。本工程压脚块石棱体设计宽度窄,顶面宽度仅为5 m,设计棱体块石规格为2~5 t 大块石,几乎多抛一块石头就会超高,而少抛一块又不够高,抛石量多少和抛填位置要把握得非常准确,棱体外侧坡比为1∶1.5,内侧坡比为1∶1.33,棱体内侧块石宽度和坡度抛填成型质量直接影响水下第一排扭王字块体能否顺利安装上去,利用水上船舶抛石或吊机岸上吊抛均受风浪、水流以及水下不可视因素制约,常规传统抛石工艺根本无法完成这项艰巨的任务。采用智能引导理坡系统实现水下可视化作业,现场只需要挖掘机操作手观看系统控制箱实时提供的信息,高挖低填,实现精准理坡,如图4所示。

图4 水上理坡Fig.4 Slope Triming at Barge Image
4 精度与质量
4.1 智能引导系统理坡精度
操作手可通过智能引导系统辅助挖斗斗齿逐点触碰边坡坡面,并使用快速记录按钮记录点位坐标和高程自动存储于控制箱默认根目录下,验收完成后,可使用存储工具拷贝到电脑里生成断面图作为验收资料。为检验该系统的测量精度,采用多波束测深仪分别在本工程外防波堤CH1+300 m~CH1+400 m 段海侧,按照设计要求理好的边坡进行测量实验对比,情况如下:
⑴根据本工程验收规范要求,利用智能引导系统挖掘机纵向每5 m 测量一个里程断面,横向偏距每1 m记录一个数据,并且生成断面图;
⑵把多波束测深仪安装在测量船上对该区域进行全面扫海测量,测量成果也按照1 m×1 m的网格、每5 m生成一个断面图。
二者测量成果对比如图5所示,可以发现,智能引导系统测量成果与多波束测深仪测量成果基本吻合,差距很小,满足验收规范要求,得到业主和监理的高度认可。所以智能引导系统在施工过程中既能作为引导理坡工具,也能作为测量自检和验收工具,实现施工、自检、验收一体化。为在现场无需测量放样的情况下,精确完成理坡各项工序,无需等待测量人员用测深仪扫海就能解决自检和验收问题,省去测量人力、器械和时间成本,提升了施工效率,保证了工程质量,节约了成本,为施工单位赢得了更多的利润,为建设单位提供更直观可控的结构质量和安全保障。
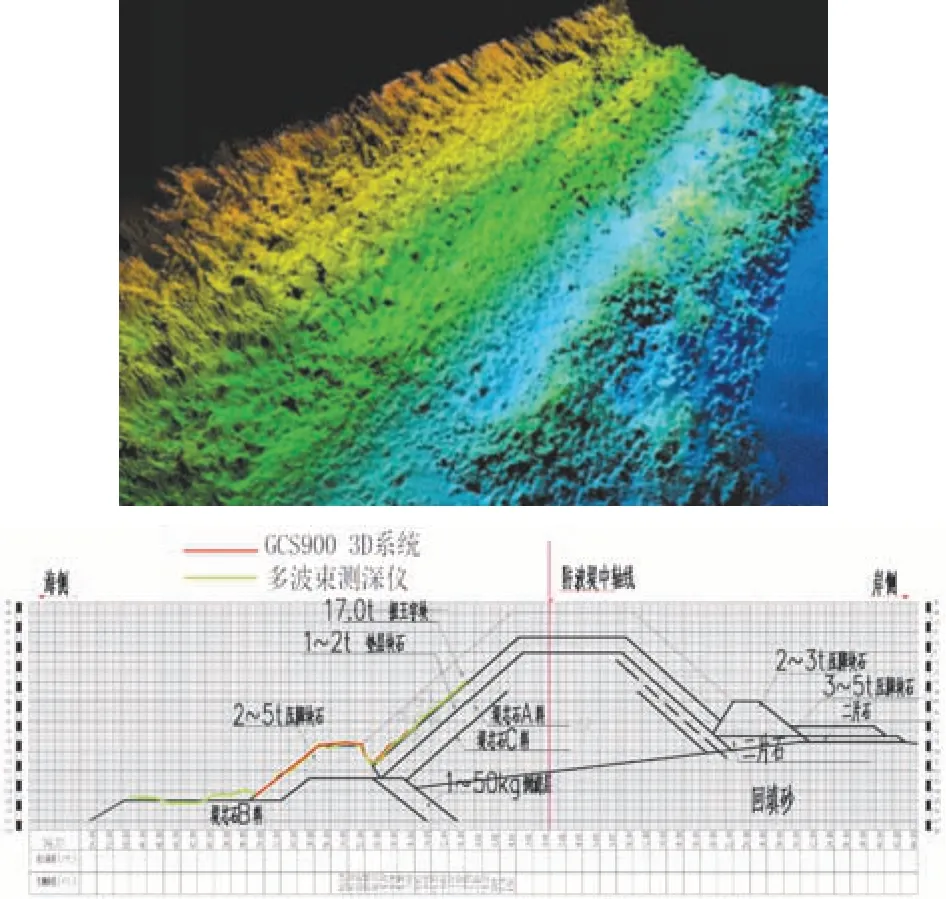
图5 测深仪与智能引导系统测量数据对比Fig.5 Comparison of Survey Data Between Bathymeter and Intelligent Guidance System
4.2 理坡质量
验收时,采用测深仪扫海检查,结合实际理坡施工记录,块石密度、坡面高程平整度等均能满足设计与《防波堤设计与施工规范:JTS 154-1—2011》[9]的要求。护面扭王字块体安装时,虽存在部分块体安装很难达到全规则,这是由于块石垫层存在沉降变形或受风浪袭击变形所致,但块体整体安装合格率达到设计要求95%以上,扭王字块能相互接触紧密,相互咬合,形成整体,观感舒畅,经现场采用测深仪扫海和无人机测量拍摄抽查,安装密度和坡度均达到设计要求[10]。
至今半年,经历印度洋恶劣天气大风大浪袭击,扭王字块总体虽有下沉,但总体平整,相互咬合紧密、牢固,堤身整体沉降位移小,未出现拔缝淘芯情况(见图6),充分验证了理坡质量的可靠性。

图6 无人机航拍Fig.6 Aerial Photograph of UAV
5 结语
本工程的施工特点与难点使理坡成为工程施工关键环节和关键工序,施工过程中所采取的新技术与新工艺大有成效,保证了质量和进度,其技术和工艺的创新点体现在以下两点:
⑴将水上施工方案的不可行转为可行,将传统水下盲目施工转为可视化施工,提高施工效率和质量,确保施工连续性与可控制性;
⑵减少人力成本投入,提升施工人员的综合能力,减轻工程技术管理人员的负担,降低工程设备的损耗率,为推动一带一路海外工程建设实现本土化管理提供有力的保障;
外海深水防波堤坡面长、宽度窄,垫层块石理坡、扭王字块安装等水下工序复杂,对于大型施工机械完全按设计要求施工,其质量难以控制,且海况条件比物理模型时所比拟的条件复杂多,施工难度大,因此,如何在工期紧、单价与措施费用低、建筑市场竞争激烈等环境下,按设计及建设单位要求建设好防波堤仍需不断探讨。