采用横摇式起落架直升机机体频率影响因素分析
2022-04-09张若忱
张若忱
(航空工业直升机设计研究所,江西 景德镇 333001)
0 引言
在直升机的研制过程中,必须要对“地面共振”问题加以分析。此现象在直升机机体频率与旋翼摆振后退型频率相近,且阻尼不足时就可能会出现,因此,在设计阶段可能需要对机体频率进行调整,以避免“地面共振”出现。起落架对机体频率有直接影响,而不同构型的起落架,对于机体频率的影响有所不同,所以研究起落架参数对于机体频率的影响有重要的意义,能够为分析和避免“地面共振”问题提供依据。
目前,国内的直升机大多采用纵摇式起落架或滑橇式起落架,但采用横摇式起落架的型号极少。纵摇式起落架的摇臂绕侧向转动,机轮沿航向前后运动,而横摇式起落架的摇臂绕航向转动,机轮沿侧向左右运动。两种起落架由于自由度不同,所以机体模态也有所不同,因此对横摇式起落架的研究是十分必要的。
本文使用Patran商用软件建立机体的简化模型,之后在此模型的基础上,研究部分参数对机体频率的影响进行分析。
1 建模
模型模拟采用后三点横摇式起落架的直升机,起落架结构如图1所示,主起为航向视图,尾起为侧向视图。主起摇臂只能绕航向转动,尾起为立柱式。

图1 起落架结构示意图
根据文献,建立简化模型时,将机体简化为一个重心处的质量点,该质量点与起落架采用MPC连接,主起缓冲器采用弹簧单元模拟,摇臂采用梁单元模拟,摇臂和缓冲器之间由MPC约束航向转动之外的自由度。尾起缓冲器采用弹簧单元,并用MPC约束垂向位移之外的自由度。机轮刚度由三个方向的弹簧单元模拟。建立的简化模型如图2所示。
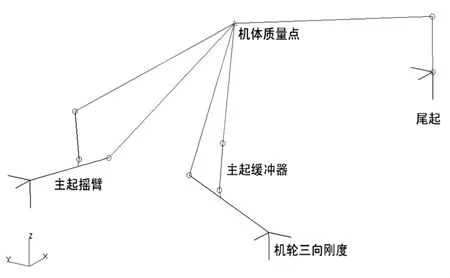
图2 简化模型
2 影响因素分析
选取一个模型作为对比基准,其参数见表1。

表1 基准模型参数
基准模型计算的机体频率如下,其中,航向和侧向模态指重心质量点有航向或侧向位移的模态。
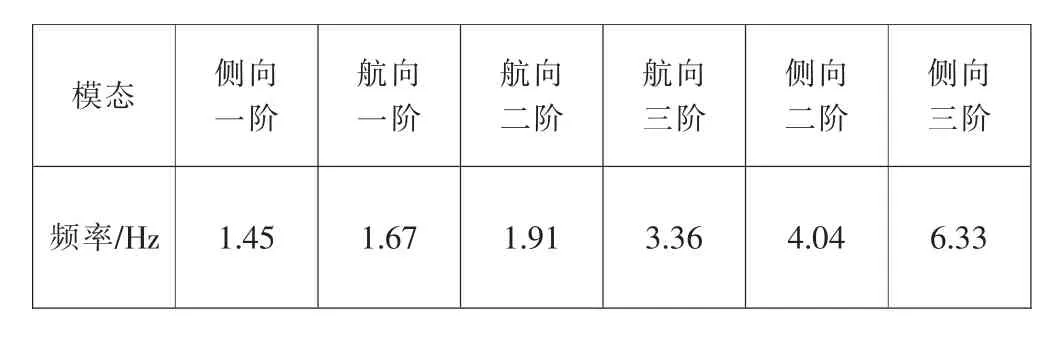
表2 基准模型机体模态频率
下面在其他参数不变的情况下,计算单个参数变化后的机体频率。
2.1 主起落架机轮侧向跨度
通过将主起整体向内或向外平移,改变主起机轮侧向跨度,计算结果如下。由表3可见,侧向一阶模态频率随主起机轮侧向跨度增大而提高,其他模态频率变化不大。

表3 改变主起机轮侧向跨度后的机体模态频率
2.2 主起与重心航向距离
通过将主起整体沿航向平移,改变主起与重心航向距离,计算结果如下。由表4可见,随着主起与重心航向距离增大,侧向二阶模态频率提高,航向一阶、航向三阶模态略微提高,其他模态频率变化不大。

表4 改变主起与重心航向距离后的机体模态频率
2.3 尾起与重心航向距离
通过将尾起整体沿航向平移,改变尾起与重心航向距离,计算结果如下。由表5可见,随着尾起与重心航向距离增大,航向一阶、航向三阶、侧向二阶、侧向三阶模态频率均提高,其他两个模态频率变化不大。
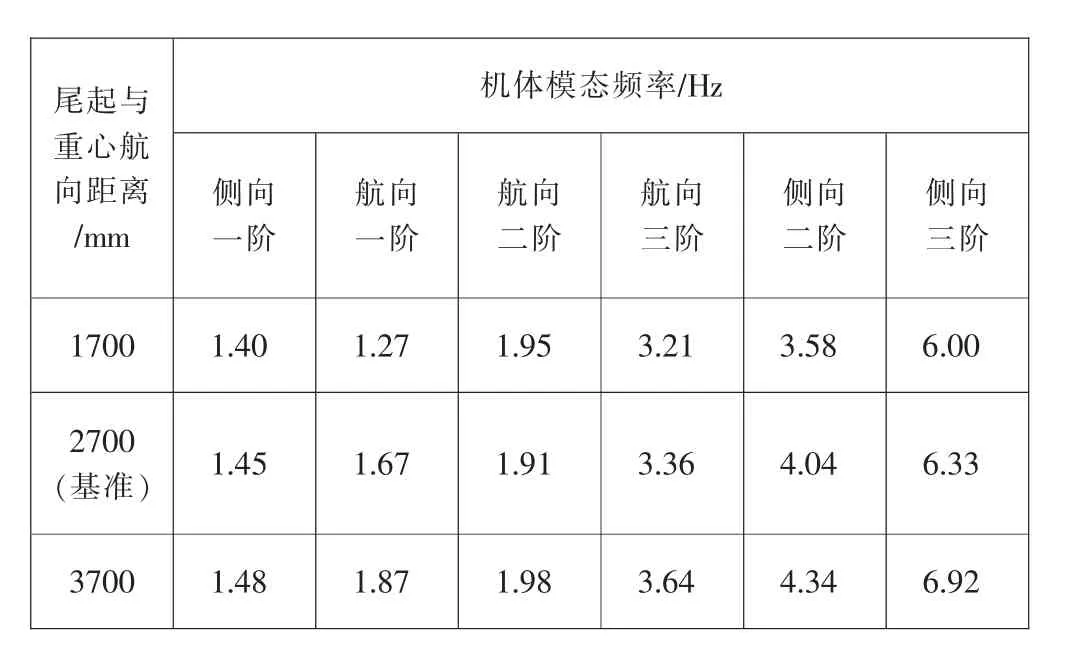
表5 改变尾起与重心航向距离后的机体模态频率
2.4 重心高度
通过将重心质量点沿垂向平移,改变重心高度,计算结果如下。由表6可见,随着重心高度增大,侧向一阶、航向一阶模态频率降低,航向三阶、侧向二阶、侧向三阶频率模态提高,航向二阶模态频率基本不变。
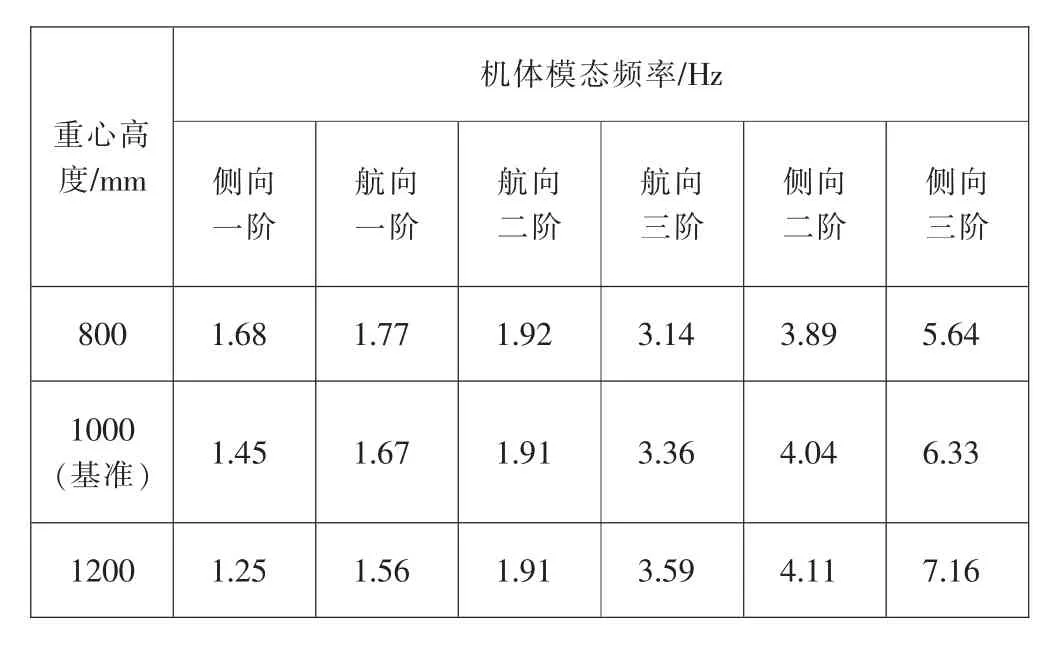
表6 改变重心高度后的机体模态频率
2.5 主缓刚度
改变主起落架缓冲器刚度,计算结果如下。由表7可见,随着主缓刚度增大,侧向一阶、航向二阶模态频率提高,其他模态频率变化较小。

表7 改变主缓刚度后的机体模态频率
2.6 尾缓刚度
改变尾起落架缓冲器刚度,计算结果如下。由表8可见,随着尾缓刚度增大,航向一阶模态频率提高,航向二阶和航向三阶模态频率略有提高,其他模态频率变化较小。

表8 改变尾缓刚度后的机体模态频率
根据计算结果,采用横摇式起落架的直升机,机体模态频率影响如下,正相关表示参数越大,模态频率越高,负相关则相反。表9可为采用横摇式起落架直升机机体模态的调频提供依据。
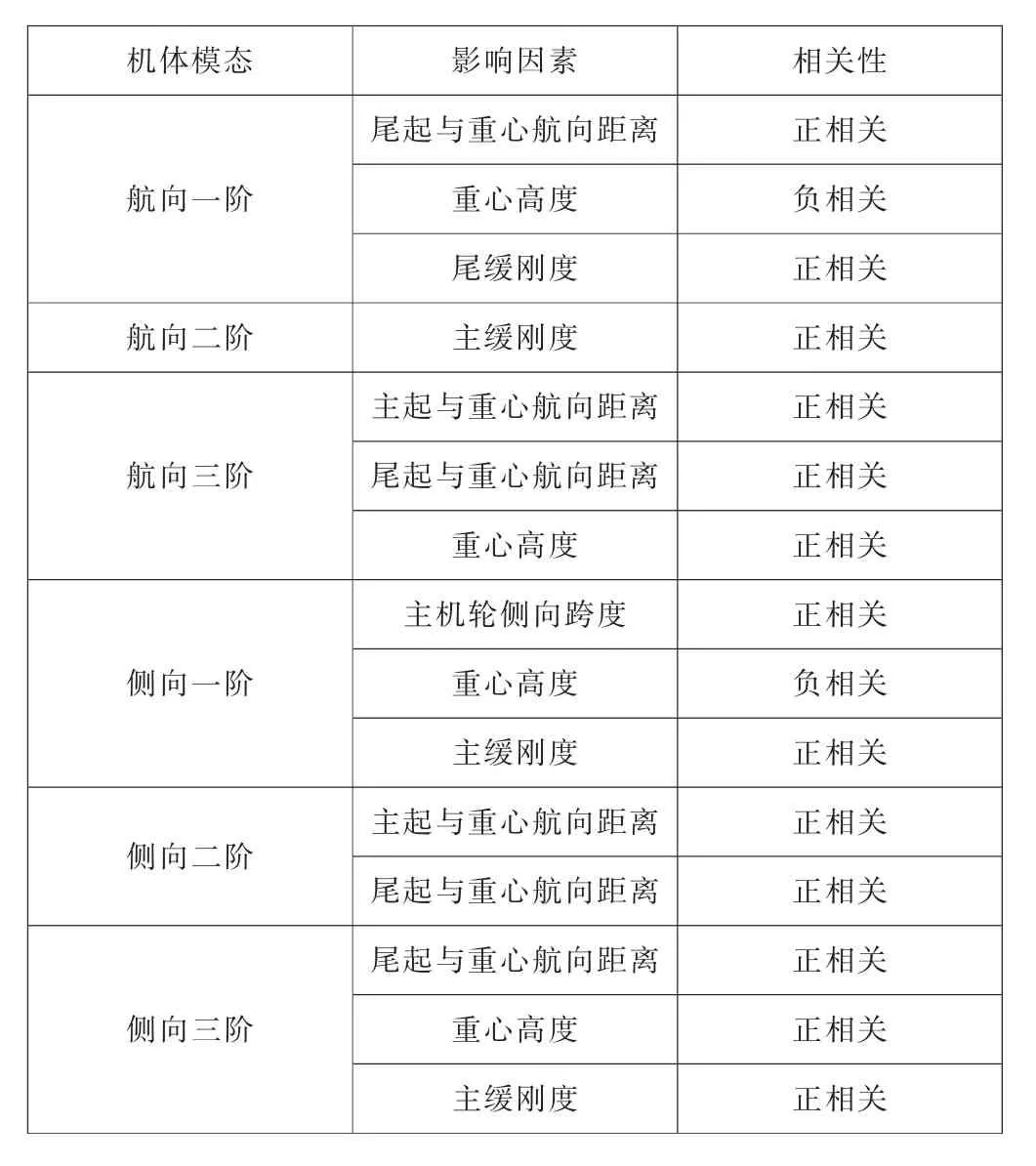
表9 机体模态影响因素
3 结语
横摇式起落架的构型新颖,但对地面共振的稳定性提出了严格的要求。本文给出了在“地面共振”分析时建立机体简化模型的方法,并针对主起落架机轮侧向跨度、主起与重心航向距离、尾起与重心航向距离、重心高度、主缓刚度、尾缓刚度对机体频率的影响进行分析,为采用横摇式起落架的直升机“地面共振”评估以及机体调频提供依据。