基于CNN-GRU的冷水机组传感器偏差故障诊断方法
2022-04-08李冬辉赵墨刊高龙
李冬辉 赵墨刊 高龙



摘要:针对冷水机组传感器偏差故障识别率低的问题,提出一种基于卷积神经网络(Convolutional Neural Network,CNN)和门控递归单元(Gated Recurrent Unit,GRU)融合網络模型(CNN-GRU)的冷水机组传感器偏差故障诊断方法.该方法利用GRU记忆冷水机组因每个传感器动态响应特性不同造成的其每个传感器不同的时间相关性,克服了CNN在冷水机组传感器偏差故障诊断中仅能提取时间序列实时特征的缺点.首先采用CNN自动提取传感器时间序列的实时特征,然后利用具有长短期记忆能力的GRU实现对冷水机组传感器不同时间相关性的记忆,从而充分利用时间序列中的特征信息对数据进行表征建模,进而有效提升了冷水机组传感器偏差故障识别率.将该方法与CNN、主成分分析和自动编码器方法进行比较,实验结果表明:温度类和压力类传感器的偏差故障识别率分别在85%以上和90%以上;验证样本得到了83%以上的偏差故障识别率,验证了该方法的泛化能力良好;该方法对于同一传感器、故障大小互为相反数的偏差故障的故障识别率均具有良好的对称性;该方法的偏差故障识别率高于其他方法,尤其对于很小的偏差故障的识别率具有更明显的优势.
关键词:卷积神经网络;深度学习;冷水机组;传感器;故障诊断
中图分类号:TP277
文献标志码:A
在智能建筑中,冷水机组是制冷空调系统的主要耗能设备,冷水机组传感器实时监测系统的运行状况,对实现系统的最优控制和能源管理起到重要的作用.而冷水机组传感器故障不仅会影响制冷空调系统的运行状况,也会导致运行能耗的增加.因此冷水机组传感器故障诊断技术的实现对于确保系统正常运行和降低系统能耗具有十分重要的意义.
近几年来学者们对基于数据驱动的制冷空调系统传感器故障诊断方法的研究取得了卓越成果.主成分分析(Principal Components Analysis,PCA)方法是传感器故障诊断中比较流行的方法[1].文献[2]首先运用经验模态分解阈值除噪方法对原始传感器时序数据中的噪声进行消除,从而提高传感器时序数据的质量,然后针对除噪后的传感器时序数据建立PCA模型来实现冷水机组传感器的偏差故障诊断.但PCA方法不能直接解决空调系统的非线性和多模态问题.其在诊断空调系统传感器故障的问题上受到了一定限制.针对PCA方法存在的问题,文献[3]首先提出了核主成分分析(Kernel Princpal Compo⁃nent Analysis,KPCA)法.文献[4]利用KPCA方法提取空调系统的非线性特征来实现空调系统传感器故障诊断.然而PCA方法及KPCA方法必须通过建立Q统计量贡献图的方式间接的确定故障传感器,工作量大,费时费力.
深度学习方法也是制冷空调系统传感器故障诊断中常用方法.递归神经网络(Recurrent Neural Net⁃work,RNN)引入了记忆单元使网络具备了一定的记忆性,能够处理和分析具有时间相关性的数据[5].RNN的问题是存在梯度消失或爆炸的缺点,长短期记忆网络[6]及GRU解决了这个问题.文献[7]通过利用LSTM深度学习方法对空调系统传感器建立传感器故障诊断模型,从而实现对空调系统传感器偏差故障诊断.文献[8]通过对LSTM的门结构进行改进和简化来实现冷水机组传感器偏差故障诊断.文献[9]通过利用基于GRU单元的编码-解码神经网络对正常传感器时序数据特征进行挖掘与提取来诊断传感器偏差故障.
CNN是深度学习领域中另一种广泛应用的方法[10-13].文献[14]利用CNN和RNN深度学习方法通过学习空调传感器采集的时间序列,进而根据时间序列对温度进行预测来实现温度的自适应调节.文献[15]利用一维卷积神经网络诊断空调系统中的空气处理单元传感器故障,该方法利用卷积神经网络自动提取时序数据实时特征,并使用小波聚类对其进行分析,通过表示簇对传感器故障进行检测和诊断.
由于冷水机组每个传感器动态响应特性的不同造成冷水机组每个传感器具有不同的时间相关特性,即每个传感器当前采样时刻的读数都要受到过去采样时刻读数的影响,CNN虽然可以自动提取时间序列实时特征,但由于其自身结构的局限性,导致CNN难以记忆冷水机组传感器不同的时间相关性,而具有长短期记忆能力的GRU能够实现对传感器不同时间相关性的记忆,并且在GRU中加入CNN也增加了深度学习网络对时间序列实时特征的提取能力并通过降低参数数量减少了运算量.因此本文针对冷水机组传感器偏差故障识别率低的问题提出一种基于CNN-GRU融合网络模型的冷水机组传感器偏差故障诊断方法,并且以压缩式冷水机组为研究对象,通过大量的实验与对比分析验证了本文所提方法的有效性.
1深度学习网络结构
CNN和GRU网络是深度学习中两种常见的网络.与浅层学习相比,深度学习能够实现数据的逐层转换,保证了最有效的特征表达和信息提取.
1.1CNN原理结构
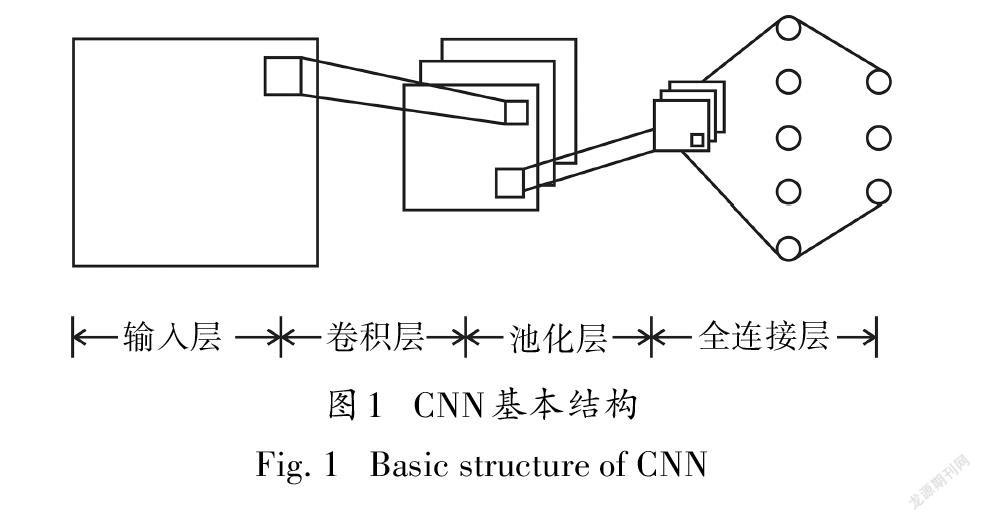
CNN模型采用权重共享和局部连接的方式,通过对原始数据进行逐层的特征提取,能够有效自动提取数据内部中的更高级更抽象的特征[16].如图1所示,一般CNN是由输入层、卷积层、池化层和全连接层构成的.
1.2GRU原理结构
GRU网络的基本结构见图2,其公式见式(1).
GRU[17]网络由更新门和重置门构成.在时间序列处理任务中,GRU能够记忆各个传感器不同的时间相关性.
图2与式(1)中,x,为当前时刻的输入向量;h,和分别为当前时刻和上一时刻的状态记忆变量;T,、z,分别为重置门状态、更新门状态;为当前时刻候选集状态;W、W,和W表示可训练权重参数矩阵;I表示单位矩阵;·表示矩阵点乘;[]表示向量连接;×表示矩阵乘积;o表示sigmoid激活函数.tanh与sigmoid的表达分别见式(2)和式(3):
2基于CNN-GRU的冷水机组传感器故障诊断模型
2.1CNN-GRU融合网络模型原理
冷水机组传感器时间序列是高度时间相关性的时序数据.传统方法提取高维时间序列潜在特征的能力有限,从而影响偏差故障诊断效果.CNN-GRU融合网络模型利用CNN其特殊的卷积-池化运算,可以自动挖掘出时间序列的实时特征,为提高传感器偏差故障诊断精度奠定基础;GRU神经网络具有独特的门结构,能够记忆冷水机组因每个传感器动态响应特性不同造成的其每个传感器不同的时间相关性,从而充分对时序进行表征建模,进而实现冷水机组传感器偏差故障诊断.
2.2CNN-GRU融合网络模型结构
图3为CNN-GRU融合网络模型具体结构,其包括输入层、CNN网络层与GRU网络层和输出层.其每层描述如下:
输入层:输入层将冷水机组传感器采集的时间序列经归一化处理后作为CNN-GRU融合网络模型
式中:sam代表第sam份样本,xsam代表在第t个采样时刻下的传感器时间序列,其内部包含有当前时刻n个传感器的读数信息,n为冷水机组传感器的数量,T为样本中包含的采样次数.
CNN层:CNN层对输入数据进行特征提取,本文采用Valid卷积方式并将卷积操作后输出进行批量标准化操作[18],再与偏置相加通过Relu函数计算后作为卷积层的输出.Relu函数公式为:
池化层采用最大池化和Valid池化方式.卷积池化见式(6):
其中y、Ci和Pi分别表示经BN操作后的输出矩阵、卷积层i的输出和池化层i的输出,1≤i≤3,且i为整数;P1*和P2*是分别对P1和P2里所有的特征图相加求平均值;W1、W2和W3为权重矩阵;b1、b2、b3、b4、b5和b6为偏置项;*和Maxpoo(l)分别为卷积运算和最大值池化函数.
GRU层:将卷积得到的高维抽象特征矩阵,经过reshape函数处理后作为三层GRU网络的输入,re⁃shape函数表达式为:
B=reshape(A,size)(7)
其含义为将A矩阵重构成与A元素相同的多维数组B,其维数由向量size来决定.
该文对卷积层的输出重构为二维特征矩阵,维数为a×b,第sam个样本经CNN输出后再reshape后的矩阵用向量表示为:
将b个维数为a的特征向量输入到三层GRU中,得到输出h3b.
输出层:输出层的输入为上一层的输出h3b,输出通过全连接层和softmax计算输出的概率值.
softmax公式表示为:
式中:xi表示第i个节点的输出值,n为输出节点个数,g(x1≤i≤n.i=1表示第i个元素属于第i个类别的概率值,
3基于CNN-GRU的冷水机组传感器偏差故障诊断实验
3.1冷水机组传感器偏差故障表征方法
表1为传感器的故障类型及表征方法.本文主要诊断11种冷水机组传感器的偏差故障.因为冷水机组系统中多个传感器同一时刻发生故障的概率非常小,所以本文只针对同一时刻至多有一个故障传感器的情况进行研究.将每一种传感器偏差故障对应一类标签,本文的表征方式为:在发生偏差故障的传感器对应位置上标1,其余位置都标0.本文标签为诊断11种传感器偏差故障再加上正常情况总共分为12类.
3.2基于CNN-GRU的冷水机组偏差故障诊断流程
图4为偏差故障诊断流程图,其具体步骤如下:
1)冷水机组实验平台持续采集不同负荷下正常运行的传感器时间序列,去除掉异常数据,建立传感器数据集,并将数据集分割成n+1等份,其中n为传感器个数,将n个数据集随机对应n个传感器,剩下一份作为正常样本;
2)将这n+1份数据集的每一份都拆分为训练、测试和验证样本:随机在每份数据集中选取70%和20%的连续样本分别作为训练样本和测试样本,10%作为验证样本,用于验证该方法的泛化能力;
3)对第i份数据集的训练样本和测试样本的第i个传感器时序上分别随机模拟加入超出误差允許范围的一定大小偏差故障,其中1≤i≤n,i为整数;
4)由于不同传感器的读数具有不同的量纲,将步骤3处理过的n+1份数据集按照均值为0、方差为1进行归一化处理;
5)设置主要参数的初始值.其包括输入输出的维数、CNN的参数、GRU的参数、权重、学习速率等参数的初始值;
6)将训练样本输入到模型中进行模型训练.选用交叉熵损失函数并选用自适应矩估计算法进行反向传播,优∑化权重和偏置项.损失函数表达式为:
式中:y和y͂表示模型预测的概率分布和实际的概率分布.
7)当k>kmax,终止训练并保存模型,否则返回步骤6,其中kmax=5,k表示当前输出准确率连续高于历史输出最高准确率的次数;
8)将测试样本输入到训练好的模型中进行冷水机组传感器偏差故障诊断.
4样本数据采集及处理
本文在图5所示的压缩式冷水机组实验平台持续采集无故障的传感器时序数据.该研究通过利用水箱中的电加热管对水箱温度进行调节来改变冷水机组的负荷,从而得到冷水机组在不同负荷下的时序数据.接下来进行数据采集,首先开启实验设备使其正常工作,上位机软件读取冷水机组每个传感器时间序列.设备正常工作1000h,采样周期为2min,并通过数据清理的方法来对所采集的数据进行预处理,获得了28594组样本数据.将样本数据按照采集顺序分为12等份,然后将12份样本数据分别随机匹配11种传感器和1种正常情况.对每一份样本数据都随机选择其中70%和20%的连续样本数据分别作为训练样本和测试样本,剩下的10%作为验证样本用于对诊断模型的性能进行评估.依据每个传感器的精度不同,本文给出了对第i份样本数据的训练样本和测试样的第i个传感器数据分别模拟偏差故障的情况,其中1≤i≤n,i为整数.如表2和表3所示.最后对训练样本和测试样本进行归一化处理.
5实验验证和对比分析
5.1CNN-GRU融合网络模型参数的选择网络模型的参数选取,首先将各个参数都分别设置为几个不同的取值,从每个参数中选取的每一个预设值分别组合在一起,然后再分别进行传感器故诊断测试实验,最终找到所有参数组合中偏差故障识别率最高的网络参数组合作为本文所选定的参数.具体参数如下:输入维度为11×20(n×T),三层卷积核和三层池化核尺寸大小分别设为3×3和2×2;三层卷积核的数量分别为64、128、128;卷积步长和池化步长分别设为1;三层GRU的输入为128个22维向量;全连接维度为12×45;学习速率为0.001;drop⁃out=0.5;batchsize=64.
5.2实验结果与分析
5.2.1偏差故障识别率实验及分析
将加入偏差故障的测试集数据输入到训练好的模型中测试模型性能,该方法的实验结果如图6、表4-5和图7、表6-7所示.
1)本文所提方法对于同一传感器、故障大小互为相反数的偏差故障的故障识别率均具有良好的对称性;
2)由图6和表4-5可知,采用本文所提方法诊断温度类传感器偏差故障时,对于偏差故障大小为±1.2°C、±0.9°C(针对T1、T5、T6和T7)和±2.5°C、±2°C(针对T2、T3和T4),各个传感器的偏差故障识别率均在97%以上;对于偏差故障大小±0.6°C、±0.3°C(针对T1、T5、T6和T7)和±1.5°C、±1°C(针对T2、T3和T4),各个传感器的偏差故障识别率均可达到85%以上;
3)由图7和表6-7可知,采用本文所提方法诊断压力类传感器偏差故障时,对于偏差故障大小为±0.08MPa、±0.065MPa、±0.05MPa(针对P1和P4)和±0.1MPa、±0.09MPa、±0.08MPa(针对P2和P3),各个传感器的偏差故障识别率基本上都达到或接近100%;對于偏差故障大小为±0.035MPa(针对P1和P4)和±0.07MPa(针对P2和P3),各个传感器的偏差故障识别率均在90%以上.
5.2.2泛化能力实验及分析
为了验证本文已保存好的网络模型的泛化性能,本文以节流前温度传感器T4为例,对前文提到的10%验证样本,随机加入不同数量的±0.9°C、±1.4°C、±1.9°C和±2.4°C大小的偏差故障并进行归一化处理,输入到该网络中进行泛化能力的验证,诊断结果见表8.
由表8得出,T4的偏差故障识别率均在83%以上;偏差故障识别率能保持较好的对称性.因此该方法具有良好的泛化性能.
5.3与其他方法对比
将CNN、PCA与自动编码器(Autoencoder)方法和该方法进行对比.3种方法的设置参数如下:CNN输出端选用全连接层和softmax进行12种偏差故障标签分类,其他参数与CNN-GRU所提方法所选参数相同;将Q统计量作为PCA的偏差故障诊断标准,将Q的阈值设置为3.0652,累计贡献率设置为88%,主成分数设置为6个;自动编码器采用两层编码网络,将节点设置为10、5,输出端选用softmax进行分类.该文选择T5进行分析对比,实验结果见图8和表9.
从图8和表9中可以看出,T5对于±1.2°C和±0.9°C的偏差故障,CNN-GRU方法与CNN方法的偏差故障识别率都接近或达到100%,自动编码器方法的偏差故障识别率高于80%,但PCA方法就本实验而言正向偏差故障识别率要优于负向偏差的故障识别率;对于±0.6°C的偏差故障,CNN-GRU方法和CNN方法的偏差故障识别率分别超过95%和80%,PCA方法以及自动编码器方法的偏差故障识别率均低于20%;对于±0.3°C的偏差故障,CNN-GRU方法和CNN方法的偏差故障识别率分别超过90%和50%,PCA方法和自动编码器方法此时均失效;相比于其他3种方法,CNN-GRU方法对于很小的偏差故障的识别率具有更明显的优势;本文所提方法对于T5的偏差故障识别率具有较好的对称性,其他3种方法都不具有较好的对称性.
6结论
1)本文方法对于温度类传感器的偏差故障识别率均在85%以上;对于压力类传感器的偏差故障识别率均在90%以上,均具有良好的诊断效果;该方法对于同一传感器、故障大小互为相反数的偏差故障的故障识别率均具有良好的对称性;
2)本文方法在诊断未经训练过的传感器偏差故障时,仍能保持较高的偏差故障识别率,因此具有良好的泛化能力;
3)相比于其他方法,本文所提方法具有更高的偏差故障识别率,尤其对于很小的偏差故障的识别率具有更明显的优势;
4)CNN方法在冷水机组传感器偏差故障诊断中仅能提取时序的实时特征,CNN-GRU方法加入了GRU网络,能够记忆冷水机组因每个传感器动态响应特性不同造成的其每个传感器不同的时间相关性,从而更充分地利用时间序列中的特征信息进行表征建模,进而提升了偏差故障识别率.
综上所述,本文提出CNN-GRU诊断方法取得了较高的偏差故障识别率.但在搭建该模型时采取手动遍历的方式进行参数选取,缺乏理论依据.因此探寻一种行之有效的参数选取方法是接下来将要进行深入研究的侧重点之一.
参考文献
[1]王婉.基于PCA的空调水系统的传感器故障检测与诊断研究[D].长沙:湖南大学,2014.
[2]毛前军,方曦,李冠男,等.基于经验模态分解去噪改进主成分分析的冷水机组传感器故障检测[J].暖通空调,2019,49(7):106-110.
[3] SCHÖLKOPF B,SMOLA A,MÜLLER K R.Nonlinear compo⁃nent analysis as a kernel eigenvalue problem[J].Neural Compu⁃t a t i o n ,1 9 9 8 ,1 0( 5 ):1 2 9 9 - 1 3 1 9 .
[4]杨亚伟.基于KPCA法的定风量空调系统传感器故障诊断[D].天津:天津大学,2010.
[5]张旭.基于循环神经网络的时间序列预测方法研究[D].南京:南京大学,2019.
[6]许淼,刘宏飞,初凯.基于AM-LSTM模型的共享单车时空需求预测[J].湖南大学学报(自然科学版),2020,47(12):77-85.
[7]王路瑶,吴斌,杜志敏,等.基于长短期记忆神经网络的数据中心空调系统传感器故障诊断[J].化工学报,2018,69(S2):252-259.
[8]李冬辉,尹海燕,郑博文,等.改进的LSTM方法在冷水机组传感器故障检测中的应用[J].电工技术学报,2019,34(11):2324-2332.
[9]LI D,LI D H,LI C D,et al.A novel data-temporal attention net⁃work based strategy for fault diagnosis of chiller sensors[J].En⁃ergy and Buildings,2019,198:377-394.
[10]林景栋,吴欣怡,柴毅,等.卷积神经网络结构优化综述[J].自动化学报,2020,46(1):24-37.
[11]郭敏钢,宫鹤.AlexNet改进及优化方法的研究[J].計算机工程与应用,2020,56(20):124-131.
[12]JIANG G Q,HE H B. Multiscale convolutional neural networks for fault diagnosis of wind turbine gearbox[J]. IEEE Transactions on Industrial Electronics,2018,66(4):3196-3207.
[13]宋青松,张超,田正鑫,等.基于多尺度卷积神经网络的交通标志识别[J].湖南大学学报(自然科学版),2018,45(8):131-137.
[14]黄景辉.基于神经网络技术的中央空调智能控制系统的研究[D].天津:天津大学,2018:14-34.
[15]刘晶晶.基于神经网络的AHU系统故障诊断方法研究[D].西安:西安电子科技大学,2019.
[16]何松华,张润民,欧建平,等.基于卷积神经网络的高分辨率雷达目标识别[J].湖南大学学报(自然科学版),2019,46(8):141-148.
[17]李斯泽.基于深度学习的工业大数据时间序列分类技术研究[D].哈尔滨:哈尔滨工业大学,2019.
[18]刘可文,刘紫龙,汪香玉,等.基于级联卷积神经网络的前列腺磁共振图像分类[J].波谱学杂志,2020,37(2):152-161.
