基于双阶段特征匹配的非同源SAR 船只跟踪方法
2022-04-07孟俊敏刘根旺曹成会
王 炎,张 晰,孟俊敏,刘根旺,包 萌,曹成会
(1.山东科技大学 测绘与空间信息学院,山东 青岛 266590;2.自然资源部 第一海洋研究所,山东 青岛 266061)
星载合成孔径雷达(Synthetic Aperture Radar,SAR)相比于其他光学、红外等传感器具有不受光照和云雾影响及可全天时、全天候工作的优势,是海上船只目标监测的重要手段,已被广泛应用于船只目标的检测和分类识别[1-5]。除船只目标的检测与识别之外,船只目标的跟踪也是海上船只目标监测的重要内容,对维护海上交通安全、提升海上维权执法的预警能力等具有重要意义[6]。
近年 来,随 着 星 载SAR 的 快 速 发 展,TerraSAR-X、COSMOS-Sky Med、RadarSat-2、Sentinel-1 和GaoFen-3等多颗卫星已能够提供高分辨率、多时相的SAR 数据[7],例如意大利的COSMO-Sky Med系统,由4个SAR 卫星构成星座,可在一天内对固定区域进行8次快速重访[8],从而使得海上船只目标跟踪逐渐成为可能。
SAR船只利用多时相SAR 影像获取船只目标位置信息,再对船只目标的特征进行提取与匹配,来实现船只目标跟踪。这其中的关键是目标特征的提取与匹配。当前SAR 图像特征匹配主要有全局特征匹配和局部特征匹配两类方法。其中,全局特征匹配法通过提取目标的纹理和形状等宏观特征量,并结合特征的相似度度量技术实现同名目标的匹配[9-11],如:李绮雪等[12]利用Hu不变矩形状特征,结合最小欧氏距离测度和余弦相似度实现光学与SAR 影像村庄目标的匹配;黄勇等[13]对区域边缘检测和轮廓特征提取,并利用图像区域不变矩来实现SAR 影像香港地区的图像匹配。局部特征匹配法通过衡量目标的内部特征点间主方向和梯度关系等细节特征的相似度来实现匹配,典型方法包括SIFT(Scale Invariant Feature Transform)、SURF(Speeded Up Robust Features)和ORB(Oriented FAST and Rotated BRIEF)[14-16]。这类算法具有目标旋转、尺度缩放不变性的优势,能够较好地适应复杂场景的匹配。如:雷禹和何家峰[17]提出了融合恒虚警率(Constant False-Alarm Rate,CFAR)和SURF联合的SAR 图像目标匹配算法;黎懿等[18]利用多源SAR影像之间的空间信息实现了基于SIFT 目标特征点的匹配;阴俊恺等[19]联合光学以及SAR 图像使用Harris与SIFT 算法提取待匹配图像,并通过神经网络计算图像间的特征向量匹配程度,从而实现目标的匹配。
以往关于SAR 目标匹配的研究均是针对建筑物等大型静止目标开展的。然而,船只目标有别于陆地建筑物,其尺寸小且处于运动状态,所以匹配难度远大于陆地目标。近年来,国内外学者开始关注船只等运动目标的匹配跟踪,特别关注船只目标SAR 匹配跟踪方法,例如:陈建宏等[20]利用多尺度Harris算子提取船只目标的特征点,并结合归一化相关系数度量来实现机载PicoSAR 图像与仿真SAR 图像的船只匹配。Li等[21]在遥感数据中从船只中提取特征向量并利用主成分分析方法降低特征向量的维数,然后再采用最近邻算法进行特征点匹配。顾丹丹和许小剑[22]将TerraSAR-X 船只SAR 图像逆投影至三维目标空间,再提取目标空间逆投影散射图以表征船只目标强散射源的三维分布,进而实现船只目标匹配。此外,Niu 和Lang[23]采用基于孪生卷积神经网络对TerraSAR-X、RadarSat-2以及Sentinel-1 SAR 图像进行船只目标匹配。这些研究大都是基于同一卫星平台(单一来源)SAR 数据开展的,但是单一来源SAR 数据重访周期较长且船只目标机动性强,因此,较难通过单一源SAR 实现船只匹配跟踪。当前,已有诸多在轨的高分辨率SAR卫星能够弥补单一来源SAR 数据的缺陷。然而,将这些非同源SAR 应用于船只目标的匹配跟踪,还需要克服因船只目标运动状态各异、雷达参数不同所导致的船只目标形态几何畸变的问题,只有克服这些问题,才能提高非同源SAR 船只目标的匹配跟踪精度。为此,本文提出一种全局和局部双阶段特征匹配的非同源SAR 船只目标匹配跟踪算法。该方法共分为2个阶段:第一阶段,首先从第一时相SAR 图像中提取待匹配船只目标的形状和纹理等宏观特征,再利用欧式距离对第二时相SAR 图像中的船只目标进行相似度计算,进而筛选出高度相似的船只目标;第二阶段,提取待匹配船只目标的特征点间的方向和梯度关系等细节特征,并利用快速最近邻逼近搜索函数(Fast Library for Approximate Nearest Neighbor Search,FLANN)计算第一阶段选取的高度相似的船只目标与待匹配船只的相似度,从而实现精确的同名船只匹配。经测试,相较于其他经典船只目标匹配算法,该方法能够兼顾船只多个层次特征,即使在非同源SAR 运动船只几何畸变的影响下,也具有良好的匹配跟踪精度。
1 SAR 船只匹配跟踪方法
目标特征匹配主要有局部特征匹配和全局特征匹配两类方法。局部特征匹配法强调对目标内部细节特征的描述,虽具有较强抗噪声能力,但存在一些不足,如对目标形状与纹理等宏观特征描述能力不强以及因几何畸变造成目标特征信息发生变化,这就导致仅利用局部特征匹配的方法不能对船只这类小目标的自身特征进行良好的描述。因此,需要挖掘并使用船只的全局特征以提高匹配跟踪精度。当进行船只匹配跟踪时,先在第一阶段利用全局特征匹配的方法筛选出与待匹配船只在宏观特征上具有高相似度的船只,以解决局部特征匹配法中的不足;再在第二阶段利用局部特征匹配的方法进一步描述初步筛选后的船只内部细节特征信息,这样可充分利用船只多层次特征。
在SAR 船只匹配跟踪的第一阶段中,选择形状和纹理等宏观特征来描述船只目标十分关键。通常利用一种统计特性即不变矩描述船只目标形状[9],利用灰度共生矩阵(Gray Level Co-occurrence Matrix,GLCM)[11]计算和描述纹理特征。
Hu不变矩[9]是提取目标不变矩的常用计算方法,该方法利用二阶、三阶归一化中心距构造的7个不变矩提取出描述船只形状的特征向量。对于一幅大小为M×N的图像f(x,y),其p+q阶矩阵、中心距μpq分别定义为:
在船只匹配跟踪的第二阶段中,选择局部特征点等细节特征描述船只目标,并进行特征点间的匹配。SURF算法在SAR影像目标特征提取方面已相当成熟,该算法能够从SAR 影像中提取描述船只目标内部细节特征的高维特征点描述子。但在对船只特征点进一步匹配过程中,传统SURF算法采用的是基于最近邻距离匹配算法,对于SURF算法提取的高维特征点描述子,多船只目标间特征点匹配算法复杂度较高,计算量繁重。因此,为提高匹配的效率与速度,并保证匹配的精度,将FLANN[24]最近邻算法用于船只目标特征的匹配,计算待匹配船只和初步筛选后的高相似度船只特征点的相似度。FLANN 模型的特征空间通常是一个n维实向量空间,命名为R n,其核心是寻找基于欧式距离的相邻点。欧氏距离(D)[25]的定义式为:

式中,X和Y为SURF算法提取到的特征点向量,D(X,Y)值越小,表示这些特征点对之间的距离越近,说明这些特征点相似程度越高。R n中的所有D(X,Y)都存储在若干个基于KD(k-dimensional)树部分的结构中。在整个KD 树中搜索到接近查询点的最小欧氏距离,从而可有效地搜索与待匹配船只目标最相似的船只。
本文算法的基本流程(图1)主要包括5个步骤:数据预处理、提取船只纹理及形状宏观特征、相似性度量、利用Hessian矩阵检测SAR 船只图像中的极值点以及提取的船只目标局部特征点并匹配。

图1 基于全局和局部双阶段特征匹配的非同源SAR 船只匹配跟踪方法的流程Fig.1 Flow chart of the method for non-homologous SAR ship matching and tracking based on global and local two-stage feature matching
步骤1:数据预处理。采用恒虚警率算法提取两景不同时相SAR 图像中的船只目标,并利用形态学滤波处理减弱船只目标背景噪声的影响。
步骤2:首先,提取出船只的形状和纹理的宏观特征,并构成整体特征向量。在船只目标特征提取中,基于Hu不变矩利用归一化中心距提取出描述船只形状的7个不变矩组,构造一组7维特征向量,用于表征船只的形状特征。然后,利用灰度共生矩阵取船只目标的角二阶矩(Asm)、熵(Ent)、对比度(Con)和纹理相关性(Corr)四种纹理特征,并分别计算它们的均值和标准差(σ),构成一组8 维特征向量来表征船只的纹理特征。最后,将表征形状的7个特征向量和表征纹理的8个特征向量组成15维的特征向量来表示SAR 船只目标的宏观特征。
步骤3:利用欧式距离[26]筛选出高相似度的候选船只。以表示提取到待匹配船只图像的特征向量,以表示第i个船只图像的特征向量,进而计算二者间的欧式距离(dist),计算公式为:

式中,欧式距离满足dist(i)>0,欧式距离的值越小,表明船只间相似程度越高。当欧氏距离阈值取值较大时,多船只目标间的匹配范围也会随之扩大,且局部特征中迭代匹配处理的计算量与误差会增加;当欧式距离阈值取值过小时,几何畸变等因素会对全局特征提取产生影响,造成错误地剔除正确的同名船只目标。因此,在本文中,结合式(4)及实验测试,当欧式距离的阈值选为1时,能较准确地剔除与待匹配船只类型不同的船只,实现第一阶段初步筛选高相似船只的目的,剔除掉的船只也能极大减少第二阶段局部特征提取带来的计算量与误差,从而使得两阶段中全局和局部特征的提取性能达到平衡,保证匹配跟踪的效率和精度。
步骤4:利用Hessian矩阵[15]检测SAR 船只图像中的极值点,用于提取待匹配船只和初步筛选后的高相似度船只目标的局部点特征。之后,通过拟合待匹配船只和初步筛选后的船只极值点邻域内的离散点判定并选择出稳定的极值点。利用4×4方块的Harr小波响应确定特征点的主方向,生成64维的船只局部特征点的特征矢量。
步骤5:对于提取的64维船只目标局部特征点的匹配,利用FLANN 算法计算待匹配船只目标和初步筛选后的高相似度船只目标的特征点相似度,并形成特征点对,依据特征点对匹配数量多少为原则,从初筛的高相似度船只目标库中,确定出同名船只目标,从而实现船只目标的匹配跟踪。
2 数据与算法评估
2.1 数据和研究区域
本文利用2对TerraSAR-X 和RadarSat-2卫星数据开展同名运动船只目标的匹配跟踪研究,所用的SAR 参数如表1所示。本文还同步获取了SAR 成像前后30 min的AIS(Automatic Identification System)数据。利用AIS与SAR 融合匹配方法[27],确定出2对SAR 影像中的同名船只目标,匹配的同名船只目标信息如表2所示。

表1 本文所用的TerraSAR-X和RadarSat-2的工作参数Table 1 The parameters of TerraSAR-X and RadarSat-2 used in the study

表2 根据AIS获取的同名船只的类型及数量Table 2 The types and status of the ships with the same name obtained according to AIS
第一对数据采自马六甲海峡海域(表2中1#)。在这对数据中,TerraSAR-X 和RadraSat-2数据的获取时间差约为3 min,两幅影像均为VV 极化。根据AIS数据及其海上船只移动通信业务标识码(Maritime Mobile Service Identify,MMSI),共确定出33对同名运动船只和210对同名静止船只。其中,运动船只主要以集装箱船、货船等大型船只为主,静止船只主要以油轮为主。
第二对数据采自舟山群岛附近海域(表2中2#)。在这对数据中,TerraSAR-X 和RadarSat-2数据的获取时间差约为40 min,两幅影像为HH 极化。根据AIS数据及MMSI号,共确定出14对同名运动船只以及78对同名静止船只。其中,运动船只中主要以集装箱船为主,静止船只主要以油轮为主。本文的研究区域如图2所示。

图2 马六甲海域和舟山群岛海域内同名船只主要活动区域Fig.2 The main activity areas of ships with the same name in the sea areas of Malacca and Zhoushan Islands
2.2 算法评估
本文采用船只目标的正确匹配数(Number of Correct Matches,NCM)和匹配精度(Matching Precision,MP)两个指标来评估本方法的性能,其中,MP的计算方法为:

式中,NTM(Number of total matches)是算法计算的总匹配对数。由于船只目标跟踪主要解决的是运动船只目标的跟踪匹配问题,因此本文选用全部运动船只目标开展实验,即分别在1#和2#数据中选取全部33对和14对(共计47对)同名运动船只目标进行实验验证。同时,利用本文方法与文献[20]中的Harris算法、文献[21]中的PCA-SIFT 算法和SURF算法所得的匹配精度(MP)进行对比实验。其中,利用MATLAB R2017a对Harris算法、PCA-SIFT算法和SURF算法开展实验,基于Python 3.7对本文提出的算法开展实验。这些算法所得的船只目标匹配跟踪结果如表3所示。由表3可知,在正确匹配数量和匹配跟踪精度方面,本文算法所得结果都最大。其中,利用本文算法所得MP达83%,显著高于其他算法。
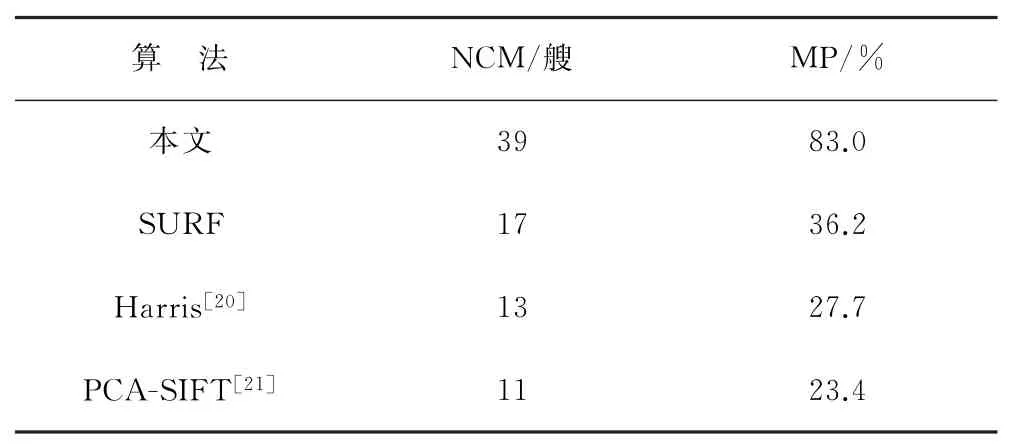
表3 利用本文方法与Harris算法、PCA-SIFT算法和SURF算法所得船只目标正确匹配个数和匹配精度的比较Table 3 Comparison of the correct number and accuracy of the ship target matching obtained by using the method of this study and the algorithms of Harris,PCA-SIFT and SURF
不同船只类型(由AIS数据提供,包括油轮、集装箱船、货船、其他如渔船等小尺寸的船只,表2)对船只目标的匹配跟踪影响结果如表4所示。由表4可知,本文方法对油轮、货船和集装箱船这三类尺寸较大船只目标的匹配跟踪精度分别为87.5%、83.3%和93.3%,均超过80%;对渔船等尺寸较小船只目标的匹配跟踪精度为66.7%。但是,Harris、PCA-SIFT 和SURF算法对油轮、货船和集装箱船三类船只目标的匹配跟踪精度较低,除SURF算法对油轮匹配精度为62.5%外,其他算法对不同类型船只匹配精度均低于60%。对于渔船等小型船只目标,Harris、PCA-SIFT 和SURF算法的匹配跟踪精度均低于20%。综合结果表明,本文方法对不同类型船只的匹配跟踪精度明显高于Harris、PCA-SIFT 和SURF算法。

表4 4种算法对不同类型船只目标的跟踪结果Table 4 Statistics of the tracking results of different ship targets obtained by using the 4 algorithms
3 几何特征对运动船只匹配跟踪的影响
即使是同名船只目标,在不同波段、极化SAR 影像中也会有明显的特征差异,如X 波段相较于C 波段对目标细节特征描述能力更强,因此,相较于RadarSat-2影像,在TerraSAR-X 影像中,船只目标的边缘和内部结构等细节特征表现更加显著。此外,不同分辨率的SAR 影像中目标轮廓大小及纹理也存在差异。所以,本文在分析运动船只目标在非同源SAR 图像中的几何特征差异基础上,评估本文算法与Harris、PCASFIT 和SURF算法在船只目标几何特征变化较大时的适用性。
首先,利用最小外接矩[28]和Canny边缘检测,提取同名运动船只在TerraSAR-X 和RadarSat-2数据对中的船长和船宽;然后,利用得到的船长和船宽提取船只目标的周长及面积,计算同名运动船只在2种卫星下的船只几何特征值变化率W,计算式为:

式中,TC和TX分别为RadarSat-2和TerraSAR-X 两个波段的同名船只几何特征量。将W分为W<10%、10%≤W≤20%和W>20%三种情况。W越大,表明船只目标的运动对SAR 图像中的几何特征估算的影响越大,也表示对算法匹配跟踪性能影响越大,因此,本文将主要分析运动船只目标几何特征变化对不同算法匹配精度的影响。
3.1 周长差异对匹配跟踪的影响
根据式(6)计算可知,在不同波段SAR 数据中,同名运动船只周长变化率Wc<10%的有12艘,10%≤Wc≤20%的有12艘,Wc>20%的有23 艘,所以Wc≥10%的船只达到35 艘,这说明船只目标的运动对SAR 图像中的周长估算有很大的影响。
在不同的运动船只周长变化率下,各个算法的匹配跟踪精度结果如图3所示。由图3可知,本文算法在Wc≤20%时所得的MP没有任何变化,均为75%;在Wc>20%时所得MP提高至91.3%。总体来说,船只周长的变化对本文算法的影响较小,而PCA-SIFT 算法MP 在Wc≤20%时有明显下降,从41.5%下降至16.7%,但在Wc>20%时,PCA-SIFT 算法MP也仅为17.4%,所以MP并无显著变化。在三类不同程度的Wc下,SURF算法MP先从50%下降至41.7%,最后降至26.1%。显然,相较于PCA-SIFT 算法,SURF算法的MP随Wc的增加而减小的趋势更加明显。可见,SURF算法匹配跟踪精度在一定程度上受船只周长变化的影响较大。此外,Harris算法MP在不同Wc下变化较小,即16.7%≤Wc<34.8%,表明Harris算法的MP随Wc的变化幅度较小。

图3 不同周长变化率(W c)下的船只目标匹配跟踪精度(MP)分布Fig.3 The distribution of the accuracy of ship target matching and tracking at different perimeter change rates(W c)
3.2 面积差异对匹配跟踪的影响
由式(6)计算可知,同名运动船只Wa<10%的有22艘,10%≤Wa≤20%的有14艘,Wa>20%的有11艘,相较于周长Wc,Wa≥10%的仅有25艘,可见船只目标的运动对SAR 图像中的面积估算较周长估算的影响较小。在不同Wa下,各算法的匹配跟踪精度(MP)结果如图4所示。由图4可知,本文算法的MP随Wa的增加而减小,但整体上本文算法MP远高于其他算法的MP。SURF算法和PCA-SIFT 算法的MP也均随船只Wa的增加而减小,Harris算法MP变化幅度很小,主要集中在30%左右,说明Harris算法匹配跟踪精度受面积变化幅度影响较小。

图4 不同面积变化率(W a)下的船只目标匹配跟踪精度(MP)分布Fig.4 The distribution of the accuracy of ship target matching and tracking at different area change rates(W a)
3.3 长宽比差异性对匹配跟踪的影响
由式(6)计算可知,同名船只长宽比变化率Wl:w<10%的有23 艘,10%≤Wl:w≤20%的有14 艘,Wl:w>20%的有14艘,所以,Wl:w≥10%的船只有28艘,与Wa≥10%的船只数量相近,可见船只目标的运动对长宽比的估算与面积估算的影响相当。
在不同Wl:w下,各算法的匹配跟踪精度(MP)结果如图5所示。由图5可知,在不同Wl:w下,本文方法的MP依次为82.6%、80%和85.7%,均高于80%,而其他3 种算法所得的MP 均较低,最高为60.9%(SURF算法,Wl:w<10%),最低为0(Harris算法、PCA-SIFT 算法,Wl:w>10%)。当Wl:w>10%时,Harris和PCA-SIFT 算法MP大大降低,分别从之前的56.5%和47.8%均降低至0,导致无法实现有效匹配跟踪,说明Harris算法和PCA-SIFT 算法受船只目标的长宽比影响较大。

图5 不同长宽比变化率W l:w下的船只目标匹配跟踪精度分布Fig.5 The distribution of the accuracy of ship target matching and tracking at different aspect ratio change rates(W l:w)
在匹配跟踪实验中,Harris、PCA-SIFT 和SURF算法在部分同名船只中出现了误配及失配的情况,为进一步解释误配和失配的原因,探寻不同方法匹配跟踪性能,本文以一组SAR 同名船只(MMSI:248819000)为例开展分析。由于船只在运动过程中发生显著几何畸变,所以选用该船只能更好地反映船只真实运动状态及检验本文算法的鲁棒性。
本文从匹配关联结果方面评价不同算法的匹配跟踪性能。不同算法均基于匹配点对数确定目标,目标内部间匹配点对数越多,证明同名船只目标间的特征结构越相似,进而确定同一目标的概率也就越大。不同算法匹配关联结果如图6所示。由图6a和图6b可知,Harris算法得到的匹配点对数大都集中在目标背景中,均为无效匹配点对,因此,依据Harris算法生成的匹配点对数最终将导致船只目标发生误配。由图6c~图6f可知,PCA-SIFT 和SURF算法在误匹配目标和同名船只中均产生部分匹配点对,其中,PCA-SIFT 算法在误匹配目标及同名船只目标中分别生成2组特征点对和1组特征点对,SURF算法在误匹配目标及同名船只目标均生成2组特征点对,依据特征点对数,将导致PCA-SIFT 算法和SURF算法最终出现误配和失配,这是由船只内部具有相似特征点和算法误差等所致。本文算法能很好地解决上述问题,如图6g,第一阶段依据全局特征能将图6a、图6c和图6e中Harris、PCA-SIFT 和SURF算法误配和失配的目标剔除,结果如图6h所示,第二阶段再依据匹配点对数确定同名目标。最终,本文算法在匹配关联结果中能保持较高的匹配跟踪精度。

图6 不同算法对SAR 船只影像匹配跟踪结果Fig.6 Results of the ship matching and tracking in the SAR images obtained by different algorithms
4 结 论
本文针对当前利用SAR 卫星进行船只目标匹配跟踪时,由于船只目标尺寸小且船只目标的运动会在SAR图像中产生几何畸变,导致船只目标在SAR 图像中难以准确实现匹配跟踪的问题,提出了基于全局和局部双阶段特征匹配的非同源SAR 船只目标匹配跟踪方法。该方法首先从第一时相SAR 图像中提取待匹配船只目标的形状和纹理等宏观特征,并利用欧式距离对第二时相SAR 图像中的船只目标进行相似度计算,筛选出高度相似的船只目标。基于此,通过提取待匹配船只目标的特征点间的方向和梯度等细节特征,并利用FLANN 计算第一阶段选取的高度相似的船只目标与待匹配船只的相似度,从而实现精确的同名船只匹配。主要结论如下:
1)本文算法对于运动船只的匹配跟踪精度(MP)为83%,相较于其他算法,本文算法能显著提高运动船只目标匹配跟踪精度。
2)本文对油轮、货船、集装箱船这三类尺寸较大的船只目标,其匹配跟踪精度均在80%以上,对于其他类型船只如渔船等小型船只匹配精度为66.7%。而Harris算法和PCA-SIFT 算法对油轮、货船、集装箱船的匹配跟踪精度均小于50%,特别对于其他船只,SURF算法、Harris算法和PCA-SIFT 算法匹配跟踪精度均低于20%。相较于其他算法,本文算法对不同类型船只具有良好匹配跟踪精度。
3)在非同源SAR 船只周长、面积和长宽比三个几何特征变化率(Wc,Wa和Wl:w)中,本文算法匹配跟踪精度与面积特征的变化有一定的相关性,在周长和长宽比变化中仍能保持75%以上的精度,特别在长宽比特征变化下,本文整体匹配精度超过80%。在其他算法中,长宽比变化对Harris算法、PCA-SIFT 和SURF算法影响最大,具有较强相关性。另外,SURF算法匹配跟踪精度也与周长的变化有一定相关性。
综合结果表明,本文的方法能够实现TerraSAR-X 和RadarSat-2不同波段、不同平台SAR 图像的船只目标匹配跟踪。目前,本文仅分析了RadarSat-2和TerraSAR-X 两种卫星平台的数据,并未在其他卫星平台开展分析,后续将在其他更多平台评估算法的性能。另外,本文中2对SAR 数据的分辨率很接近,未来将进一步评估分辨率对本文算法的影响。最后,本文数据拍摄时的海况为低海况条件,下一步将评估复杂海况下本文算法对运动船只匹配跟踪的性能。
