上行链路协作NOMA 中基于TOA 定位的研究*
2022-04-07石皓南孙顺远
石皓南 孙顺远
(江南大学物联网工程学院 无锡 214122)
1 引言
定位作为无线网络中重要的技术,被广泛地应用于各种领域中的移动设备中[1]。在蜂窝网络中,定位技术通常是基于对无线信号参数的估计。例如基于到达时间(Time-of-Arrival,TOA)、基于到达时间差(Time Difference-of-arrival,TDOA)、基于到达角(Angle-of-Arrival,AOA)、基于接收信号强度(Received Signal Strength Indication,RSSI)等[2~3]。这些定位技术应用范围更广、更适合搭载在对于功耗有要求的移动设备上。例如在LTE 和LTE-A 的蜂窝网络中,定位参考信号(Positioning Reference Signal,PRS)被用于估计定位中的信号参数,并通过正交频分复用(Orthogonal Frequency Division Multiplexing,OFDM)技术周期性地向基用户设备(User Equipment,UE)和基站(Base Station,BS)进行广播[4]。随后UE 会估计信号参数,并返回给移动服务定位中心,移动服务定位中心再通过某种定位估计算法,如TDOA,来确定UE的位置。
在5G 网络的多种多址技术中,非正交多址(Non-Orthogonal Multiple Access),或称功率域非正交多址是一种具有强大竞争空间的多址技术,有望在未来的5G 网络中得到应用[5~8]。与OFDMA 等正交多址(Orthogonal Multiple Access,OMA)方案不同,NOMA 通过将相同的时频时隙分配给多个用户来提供比OMA 更高的频谱效率[9]。在功率域NO-MA 中,不同的功率系数根据不同的信道条件分配给不同的用户[9~10,17]。不同用户的信号通过叠加编码技术(Superposition Coding,SC)进行传输。为实现用户公平,通常采取的策略是将较大的功率系数分配给信道条件较差的用户。随后,用户在UE 端使用串行干扰消除(Successive Interference Cancellation,SIC)方案对自己的信号进行解码[11~12]。
协作中继策略也可以和NOMA相结合,以提高蜂窝边缘用户的性能[12~15]。这种NOMA 被称为协作NOMA。协作NOMA 又分为两种类型,即上行和下行。在上行链路中,多个UE 在同一时隙将各自的功率系数传输到中继节点,中继节点接收到再转发给BS[14,20]。随后BS再对来自不同中继节点中的多个用户信号进行解码。在协作NOMA中,传统的中继策略也可以应用于中继节点上,如放大转发(Amplify-and-Forward,AF)、解 码 器 转 发(Decode-and-Forward,DF)等。由于中继节点可以同时获取多个用户的信号,使得协作NOMA具有更高的频谱效率[7,15,19]。
已经有一些文献研究了关于OMA 下的协同中继网络定位算法。例如,文献[16]研究了TOA 在协同OMA 中的定位性能,并在此基础上,提出了一种基于RSSI 的认知中继网络定位算法。然而,目前还没有文献对协作NOMA 中定位算法进行研究。因此,本文采用AF 和DF 中继策略,结合功率域复用来研究上行协作NOMA 方案的TOA 定位算法。另外,本文重点研究和比较了不同中继节点数和中继策略对协作NOMA和OMA的TOA算法定位影响。
2 TOA定位系统与模型
2.1 协作NOMA上行链路
2.1.1 AF中继类型
在NOMA中,用户的消息以叠加编码的方式从BS中广播[8~9]。NOMA 的核心思路是各叠加用户的信号通过不同的功率系数分配,在相同的时隙或频带中发送,信道条件差的用户在传输信号时会被分配较高的功率系数[9]。
本文研究了一种采用固定中继点实现协同NOMA 上行链路的模型,这里假定UE 可以获取协作NOMA的上行链路功率系数,并且该功率系数是由BS 计算得出,发送给UE[13]。根据功率分配系数,UE首先将信号发送到中继节点,然后中继节点再根据所采用的中继策略,对接收到的信号进行处理,并转发给BS。
中继节点Rm接收到的信号ym(t)可以表示为
式(1)中,P为UE的总发射功率,并假设所有的UE有相同的发射功率[9]。L和M分别为系统中UE数量和中继节点的数量,T为一个时隙的持续时间。xl(t)为用户UEl在t时刻发送的消息,nlm(t)为UEl到中继节点Rm传输时符合N( 0 ,)的高斯白噪声模型。hslrm为UEl到中继节点Rm之间的信道衰落系数,并假设不考虑多径传输的情况。αl表示UEl的功率分配系数,该系数由BS决定。
中继节点Rm接收到UE 的信号ym(t)后,将转发至BS。BS端接收到的信号ydm(t)可以表示为
其中Pr为所有中继节点的发射功率,且各中继节点相同。Rm和BS 之间的信道衰落系数hrmd也视为不考虑多径传输。ndm(t)为符合CN( 0 ,)的高斯白噪声。Gm表示AF中继策略中的功放系数。
本文假设基站D 采用最大比合并(maximum ratio combine,MRC)方法合并信号ydm(t)[18],则基站D处合并后信号yd(t)为

由于采用了AF 中继策略,接收信号可以通过功放系数放大以补偿在UE到中继节点之间传输路径上的功率损失,这样使得中继节点的信号功率以接近于源节点UE 的功率水平进行传输。另外,通过合理的选择信道系数hrmd和hslrm,可以使UE 到基站的信道系数hsld由小到大的排列,即 |hs1d|<|hs2d|<…< |hsld|。相对地,根据NOMA 的基本原则,信道条件差的用户分配到更高的功率,功率分配系数αl也按照从大到小的方式排列,即α1≥α2则接收端UEl到中继节点Rm的信干噪比(Signal-Interference Noise Ratio,SINR)为

2.1.2 DF中继类型
与协作NOMA 下的AF 中继策略不同,DF 中继策略是在中继节点处对信号进行SIC 并分离出原始的UE 信号,随后中继节点继续将重组的信号继续向前发送至BS。在实际情况中,SIC 的解码不是完美的,可能存在解码错误,因此,在DF 中继策略中带有SIC误差的SINR可以表示为

其中εl为在SIC 过程中出现的SIC 解码错误,即εl的项意义为被解码的UE 信号在DF 中继策略过程中视作干扰的部分。当然,若在SIC 过程中没有出现错误,则εl=0。
2.2 上行链路协作NOMA
2.2.1 AF中继类型
在传统的协作OMA 方案中,用户的信号分别在不同载波或时隙中,以相同的功率系数发送。系统的带宽和发送功率根据网络内用户数量的不同而不同。和AF中继策略的协作NOMA 类似,从UE到BS的协作OMA方案下的SINR可以表示为

2.2.2 DF中继类型
在这种情况下,本文假设中继节点可以成功解码接收到的信号。随后,中继节点在OMA 的方案下在其自身的时隙内将信号转发给BS。这里的SINR 表达式与hsLrm无关。因此,DF 中继策略下的上行链路的协作OMA方案的SINR可以表示为

3 CRLB分析
本节对AF 和DF 中继策略下的上行链路协作NOMA和协作OMA进行了CRLB分析,以研究其定位精度。在整个分析过程中,本文假设固定中继节点的位置[xrm,yrm] 和基站D 的位置[xd,yd]均为已知。其中UEl的坐标向量为

其中:

FIM中的元素可以通过下式计算:

进一步用S 节点的坐标psl=(xsl,ysl)来表示CRLB:


可以得到协作NOMA 和协作OMA 在AF 中继策略和DF中继策略下的CRLB:


4 仿真实验
本节对不同网络条件下的协作NOMA 和协作OMA 的TOA 定位进行了仿真实验。表1 为仿真实验所选取的参数。
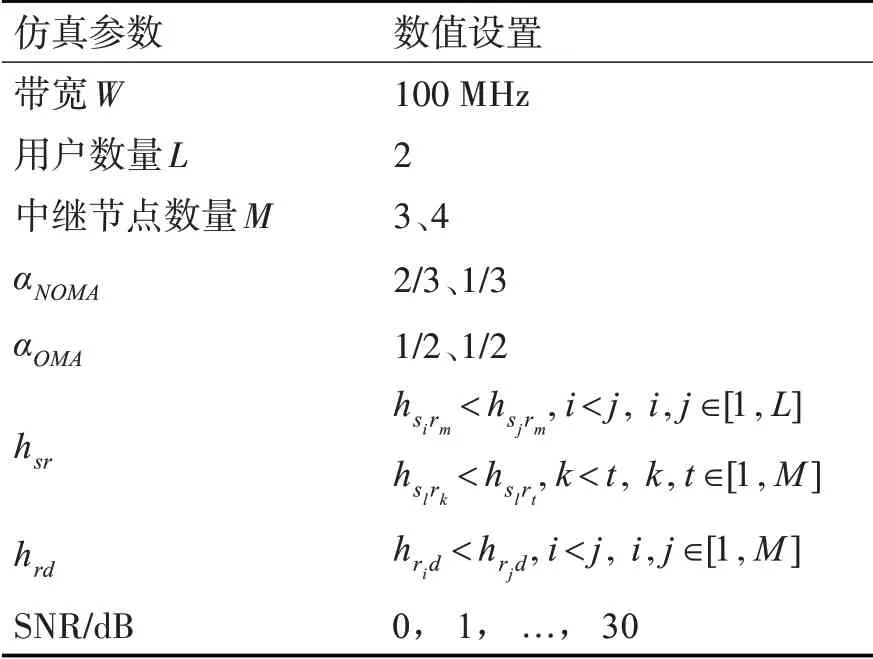
表1 仿真参数
图1 为在M=3,L=2,W=100MHz 的情况下,协作NOMA 和协作OMA 的TOA 定位算法对比情况。这里中继节点数量选择为3,是因为在进行TOA 三边测量的过程中至少需要3 个参考点(即中继节点)。另外,用户数量选择为2,是为了限制NOMA中的在同一时隙或同一频带复用的用户数量,因此要发挥NOMA在用户公平性方面的优势,需要选择具有明显信道增益差异的两用户。根据图1 中的结果,在位置精度方面,协作NOMA 优于协作OMA。并且NOMA 的两用户的位置估计误差在高SNR 的情况下可以忽略,且均小于协作OMA。此外,协作NOMA 中还可以通过调整功率分配系数,来进一步提高两用户在SINR方面的公平性。
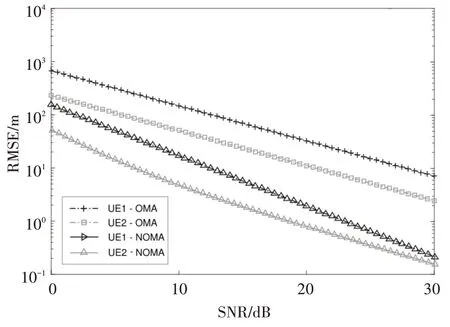
图1 协作NOMA和协作OMA的定位精度对比
在协作NOMA 和协作OMA 的定位实现过程中,中继节点的数量至关重要,直接关系着定位精度。由于在实际网络,中继节点的数量可能会由于部署位置的限制导致数量较少,例如小区的中心节点。因此,研究节点数量对协作NOMA的定位精度影响尤为重要。图2 将协作NOMA 和协作OMA 在不同数量的中继节点下的定位精度情况进行对比。所设置的参数分别为L=2,M=3,W=100MHz和L=2,M=4,W=100MHz。实验结果显示,在不同数量的中继节点情况中,协作NOMA 均优于协作OMA。另外实验还表明,增加中继节点的数量可以提高两种多址接入方案的定位精度。
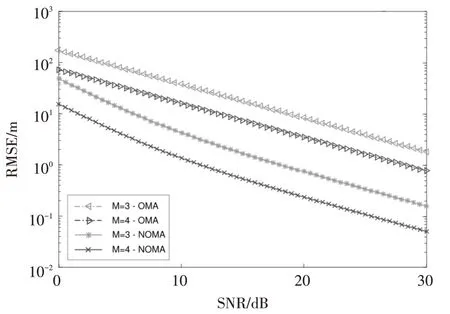
图2 不同中继节点数量下的定位精度对比
本文还研究了两种中继策略对协作NOMA 的定位精度影响,并将其与协作OMA 的定位精度进行了比较。所选参数为M=3,L=2和W=100MHz,实验结果如图3所示。从图3中可以看出,DF 中继策略比AF 中继策略有更好的定位精度,这是因为在DF 中继策略下,接收信号在中继节点处的解码为完全解码。并且协作NOMA 在两种中继策略下均优于协作OMA,这是因为协作NOMA 比协作OMA有更好的用户公平性,并且两用户在发送信号时均可以使用整个系统带宽。另外需要注意的是,DF中继策略需要较高的计算复杂度,才能在中继节点上成功解码用户信号。

图3 不同中继策略下的定位精度对比
5 结语
本文研究了在不同5G 网络条件的上行链路中协作NOMA 的TOA 定位的理论限制,研究着重于用户公平性,并且推导出了AF和DF中继策略下的上行协作NOMA 和协作OMA 的CRLB 表达式。在仿真实验中,比较了不同网络场景下的协作NOMA和协作OMA 的定位精度。实验结果表明,在所有情况中,协作NOMA 的定位精度表现均优于协作OMA。更具体的仿真实验结果为研究了网络中中继节点的数量与两种多址接入方案的定位精度关系,结果表明,协作NOMA 优于协作OMA 且使用更多的中继节点会有更好的定位精度;研究了DF 中继策略和AF中继策略与两种多址接入方案的定位精度关系,结果表明,协作NOMA 优于协作OMA 且DF 中继策略定位精度表现均优于AF 中继策略。并且,在5G标准的大带宽情况下,协作NOMA具有提供厘米级定位精度的潜力,而且协作NOMA在定位应用中可以提供改善的用户公平性。因此,选择NOMA 作为5G 网络的多址接入方案也是实现高精度定位性能和支持高级LBS 的合理选择。如果需要更高的定位精度,则可以在协作NOMA 中使用DF中继策略,但是复杂度较高。
