应用于车辆纵向控制的无模型自适应滑模预测控制方法*
2022-04-07江浩斌冯张棋洪阳珂韦奇志
江浩斌,冯张棋,洪阳珂,韦奇志,皮 健
(江苏大学汽车与交通工程学院,镇江 212013)
前言
根据汽车的智能化程度,SAE将智能汽车分为6个等级,在实现高级别自动驾驶之前,高级辅助驾驶系统(advanced driver-assistance system,ADAS)成为了重要的研究议题。汽车纵向动力学控制算法作为ADAS纵向控制功能(自适应巡航、自动制动系统、主动避撞系统等)的基础,在智能汽车的控制中起到了非常重要的作用。典型的汽车纵向动力学控制系统如图1所示,包括了驱动系、制动系和两者的切换,通过驱动/制动控制系统对期望加速度进行跟踪,输出期望节气门开度/制动压力,再将其反馈给车辆纵向动力学系统。众所周知,该系统具有非线性、参数时变性和延迟性的特点。在行驶过程中,车辆本身也存在高度非线性与参数不定性的问题,同时还会受到路面摩擦因数、道路坡度和空气阻力等外部扰动的影响,故建立精确的纵向动力学模型较为困难,即使建立简易模型,控制器的设计也很难取得较好的效果。
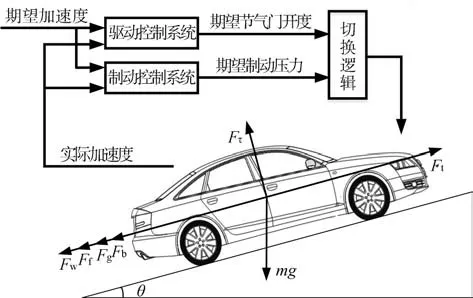
图1 汽车纵向动力学控制系统
在研究车辆纵向动力学系统时,很多学者对其进行了简化,如清华大学的侯德藻等利用发动机台架实验测得的转矩特性图和1阶传递函数对汽车驱动/制动系进行了简化,并通过实验,验证了简化模型的准确性。美国南加利福尼亚大学的Xu等采用Taylor级数展开对非线性车辆模型进行线性化得到了1阶模型,而车辆模型是时变系统,与其假设模型时不变相矛盾。这些对于模型的简化方案依赖于精确的实验数据,模型泛化性差,且未充分考虑影响闭环系统的非线性因素,闭环控制效果不佳。
为了实现对期望加速度的跟踪,需要对驱动/制动控制系统进行设计,常用的方法是建立逆纵向动力学模型,期望加速度通过驱动/制动动力学的逆模型,计算得到期望节气门开度/制动压力。如韩国首尔国立大学的Moon等基于逆纵向动力学模型与PID控制算法设计了纵向动力学的前馈+反馈控制算法,加州伯克利大学Gerdes等基于滑模控制方法与逆纵向动力学模型实现了驱动/制动执行器对期望转矩的跟踪。然而,逆纵向动力模型的设计涉及诸多车辆参数,模型较为复杂,可移植性差。
为了规避车辆纵向动力学与驱动/控制系统设计的复杂性问题,以顺应非线性时变系统的需要,无模型控制方法提供了解决思路。无模型自适应控制方法(model-free adaptive control,MFAC)是一种基于数据驱动的控制算法,由Hou等提出,其仅利用被控对象的输入/输出(I/O)的数据建立系统模型,无须建立被控对象精确的数学模型,且具有适应性强、鲁棒性强的特点,已在很多领域得到了广泛运用,如机器人仿生装置、飞行器控制、风力发电机组控制和汽车纵横向控制等。但其缺点在于,对存在迟滞的系统控制效果欠佳。滑模控制(slidingmode control,SMC)是一种处理非线性控制问题的有效控制算法,其控制与系统状态和参数无关,在外部扰动、模型不确定下的鲁棒性较好,但它须被控系统的数学模型去实现,且存在抖振问题。
据此,本文中针对车辆纵向控制系统具有的强非线性、参数时变不确定性和多外部干扰与迟滞等特性,将MFAC与SMC和模型预测控制(model predictive control,MPC)结合,分别设计了无模型自适应滑模控制MFASMC(MFAC-SMC)算法和无模型自适应滑模预测控制MFASMPC(MFAC-SMPC)算法,并在不同的典型加速度输入下验证了各算法的效果,结果表明,所设计的算法实现了纵向动力学系统的无模型、强抗扰动的控制。
1 汽车纵向动力学无模型控制方案
汽车纵向动力学控制一般包括驱动控制、制动控制和相应的切换。本文中基于无模型自适应算法搭建基于I/O数据驱动的控制器,整体控制逻辑如图2所示,车辆主要参数如表1所示。
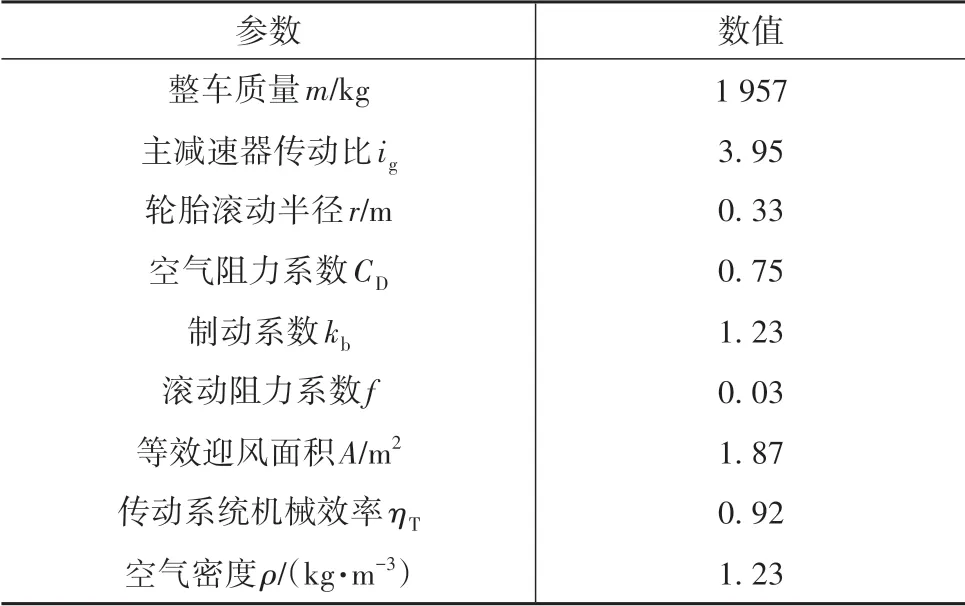
表1 主要车辆参数
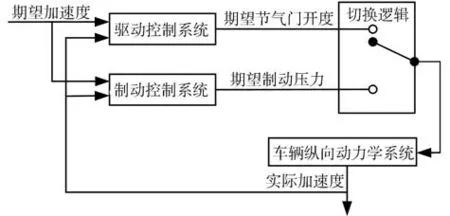
图2 纵向无模型自适应控制系统
要实现制动与驱动控制算法的平滑切换,须设计迟滞切换逻辑。众所周知,若期望加速度大于0,需采用驱动控制模式,以增大节气门开度。车辆行驶过程中,松开油门踏板或踩下制动踏板均可实现负的加速度,故期望加速度小于0时,可以通过驱动系统或制动系统实现。在CarSim中,设定节气门开度为0,得到不同车速下车辆的最大减速度值,绘制出不同车速下车辆最大减速度曲线,即切换逻辑曲线。为了考虑舒适性,减少频繁切换,将切换逻辑曲线上下偏移0.01 m/s,形成一个过渡区,如图3所示。过渡区域以上为驱动控制区域,过渡区域以下为制动控制区域,在过渡区域内不切换控制模式。

图3 制动/驱动切换逻辑曲线
2 MFASMC算法
2.1 MFAC算法设计
基于无模型自适应控制理论,对于纵向驱动、制动动力学系统,可以用以下一般形式表述:

考虑汽车纵向动力学系统参数时变、多外部扰动的特性,本文中引入外部扰动f(k),故

式中:y(k)∈R,u(k)∈R,分别表示k时刻系统的输入与输出,分别对应节气门开度/主缸制动压力与实际加速度;f(k)∈R代表外部扰动,且|f(k)|≤D,D>0;η和η为两个未知的正整数。
假设系统满足以下两个条件:
(a)除了有限时间点,f(⊗)关于第(η+2)个变量的偏导数为连续的,该条件是对非线性系统的一般约束;
(b)上述系统符合广义Lipschitz条件,即对任意k≠k,k,k≥0和u(k)≠u(k),有

其中

式中:i=1,2;b>0为一个常数。该条件是对系统输出变化量的约束,即有界的输入变化引起的输出变化也是有界的,显然对于车辆纵向控制系统,满足该假设条件。
设
Δy(k+1)=y(k+1)-y(k)
Δu(k)=u(k)-u(k-1)
Δf(k)=f(k)-f(k-1)
若|Δu(k)|≠0,一定存在一个可称为伪偏导数(pseudo partial derivative,PPD)的时变参数向量φ(k)∈R,使得系统可以转化为紧格式的动态线性化数据模型:

式中φ是有界的。
2.2 MFAC-SMC控制算法
MFAC控制器无需控制系统的模型,而滑模控制器(SMC)响应速度快、抗扰动性强,本节将MFAC与滑模控制(SMC)相结合,以融合两种控制方法的优点。
定义输出误差:

图4示出驱动/制动动力学系统MFASMC算法流程,其具体步骤如下:

图4 MFASMC控制算法流程

2.3 稳定性分析
由式(17)可知,1-qT>0,式(20)前3项均小于0,当κ取值足够小时,可保ΔV(k+1)<0,又因V(0)有界,可知系统误差是收敛的,且误差有界,再由式(14),系统给定输出y(k)是有界的同时误差收敛,可知y(k)是有界的,由系统渐近稳定的零动态特 性 知,存 在 常 数a、b、k,满 足|Δu(k-1)|≤a max|y(τ)|+b,∀k>k,即Δu(k)有界,稳定性证明完毕。
3 MFAC-SMPC控制算法
3.1 算法设计
车辆纵向动力学系统为典型的迟滞系统,MPC在解决系统迟滞问题上有较佳的效果,故基于模型预测的思想,以驱动系统输出到达滑模面,设计控制量Δu。故总控制率为
3.2 稳定性证明
将式(33)~式(36)代入式(30),可得S( k+N)=Λs(k)-qT·F( k+N)-κT·L( k+N)-
4 仿真
4.1 前馈+反馈纵向动力学控制算法
前馈加反馈控制也是一种无模型的纵向动力学控制方法,其在智能汽车的纵向控制上得到了广泛应用,即通过逆纵向动力学模型前馈补偿纵向动力学的非线性和时变等特性,通过PID反馈去减小期望加速度与实际加速度的偏差。为了验证第3节提出的两种算法的有效性,将其与纵向控制常用的前馈加反馈算法作对比。对比两种算法对参考输入的跟踪效果,以及在外部扰动下的鲁棒性,常用的前馈+反馈纵向控制方案如图5所示。
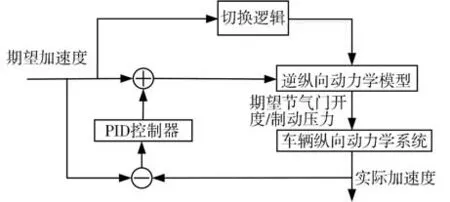
图5 前馈+反馈纵向动力学控制方案
若要实现前馈+反馈控制,须先建立逆纵向动力学模型,以将期望加速度输入转化为期望节气门开度/期望主缸压力。逆纵向动力学模型包括逆驱动动力学模型、逆制动动力学模型与两者的切换逻辑。驱动/制动的切换逻辑同第1节的切换逻辑。
假设车辆在倾斜道路上行驶,且车辆本身为刚体,则车辆受力如图1所示。车轴上的轮胎受纵向力和法向力,作用在车辆上的其他外力包括空气阻力、滚动阻力和重力。沿车辆前进方向的受力平衡方程为
4.2 仿真实验
根据表1的车辆参数,参照文献[15]和文献[19]中的工况设置,在不同的期望加速度输入下进行仿真,以比较前馈+反馈、MFASMC与MFASMPC 3种控制算法的效果。
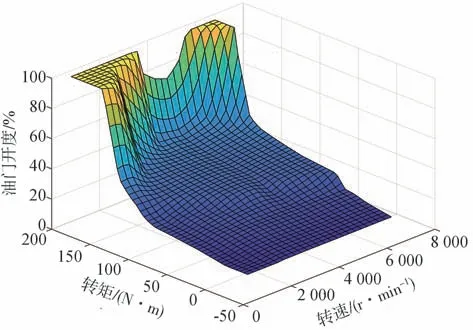
图6 发动机MAP图
(1)对阶跃输入的响应
设计幅值为0.8 m/s的阶跃加速度信号,以验证3种控制算法对阶跃输入的响应,结果如图7(a)所示。由图7(a)可见,在前8 s,3种控制算法的加速度响应几乎相同,均可以实现对期望加速度的良好跟踪,但是在阶跃点8和16 s处,前馈+反馈算法有较大超调,MFASMC算法与MFASMPC算法无超调,而MFASMPC算法因引入了模型预测的思想,其响应速度比MFASMC快。由图7(b)可见,前馈+反馈算法在阶跃点处的节气门振荡较大,而MFASMPC算法的节气门开度变化较为平滑。由图7(c)可见,在阶跃下降点16 s处,前馈+反馈算法存在较小的制动压力介入,而另两种算法制动压力均为0。
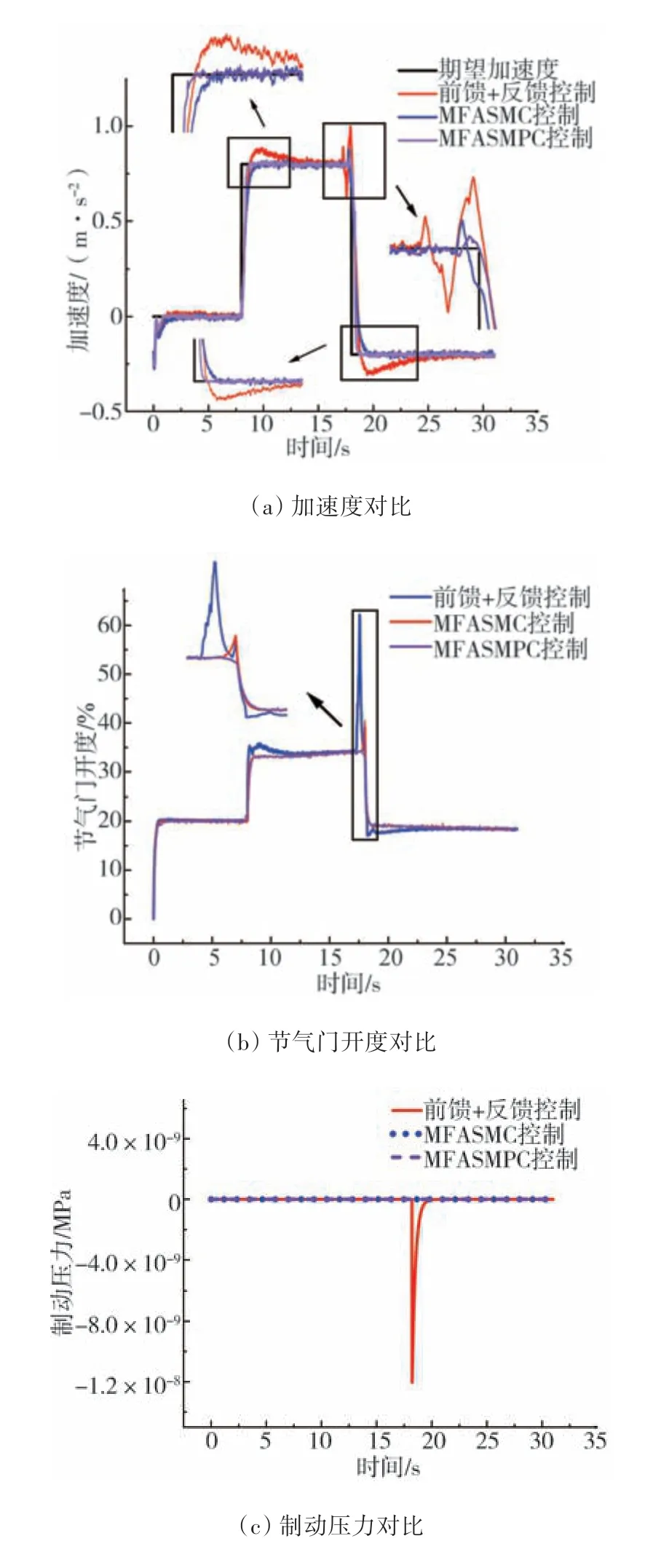
图7 对阶跃输入的响应
故在阶跃输入下,所设计的MFASMPC控制器能获得最佳的动态响应效果,且用于纵向控制时有利于提高乘坐舒适性。
(2)对斜坡输入的响应
设计幅值为0.8 m/s的斜坡加速度信号,以验证3种控制算法对斜坡输入的响应,如图8所示。由图8(a)可见,3种控制算法的加速度响应趋势较为相近,在期望加速度下降时都出现抖动,前馈+反馈算法抖动最激烈,MFASMC次之,而MFASMPC算法的抖动很小。由图8(b)可见,3种算法节气门开度在20 s前后皆有振荡,但MFASMPC算法的节气门开度振荡最小,有利于提高执行机构的使用寿命。由图8(c)可见,3种制动压力皆为0。
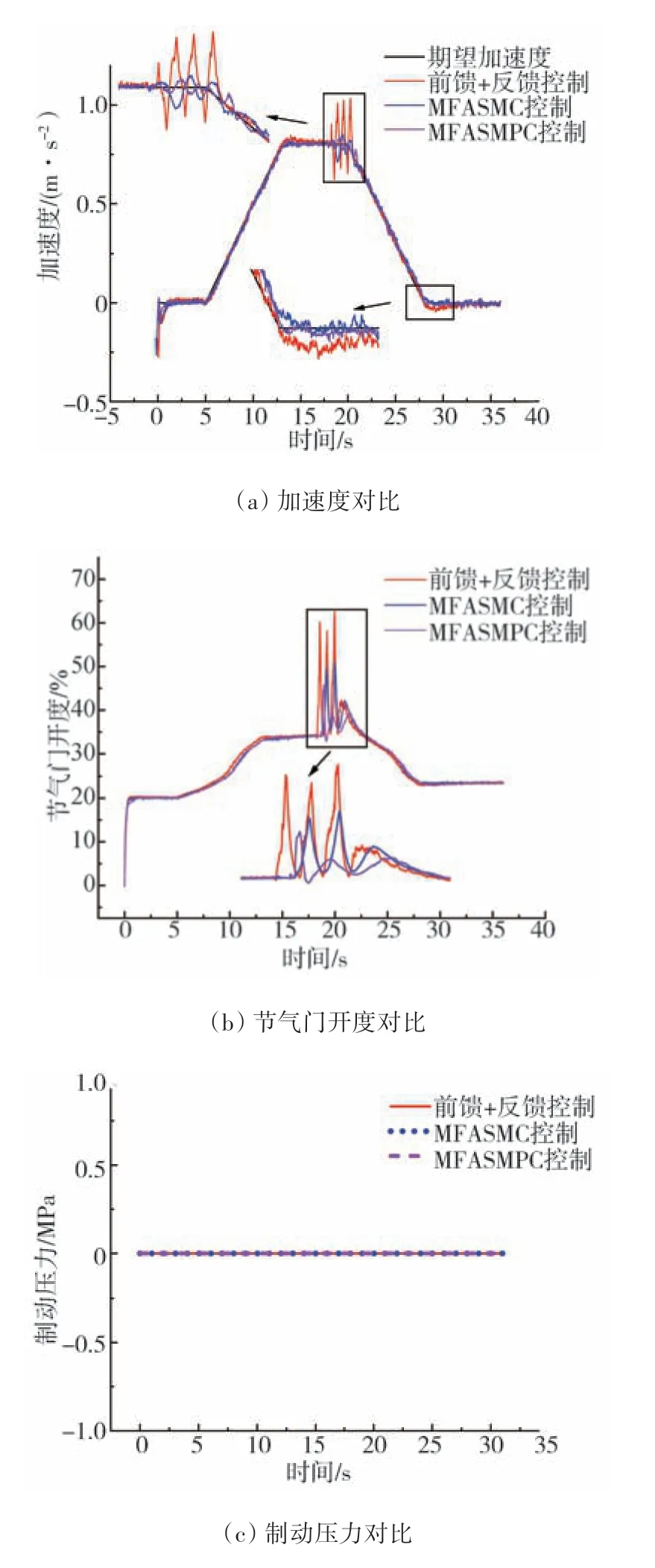
图8 对斜坡输入的响应
(3)对脉冲输入的响应
设置时长1 s、幅值1 m/s、间隔4 s的脉冲加速度输入,以验证3种控制算法对脉冲输入的响应,结果如图9所示。由图9(a)可见,由于驱动执行机构的特性,3种控制算法都能较好地跟踪脉冲加速度,只是超调量各有不同。其中,前馈+反馈算法的加速度响应超调量较大,MFASMC改善了超调的问题,在此基础之上,MFASMC的调节时间较短,在剧烈的加速度跳变下也能较快接近期望加速度。而期望加速度脉冲结束后,MFASMPC算法始终能较快将加速度调节到0。如图9(b)和图9(c)所示,与加速度响应相呼应,前馈+反馈算法下执行机构的响应更大,且制动执行机构也有短暂响应。这说明了MFASMPC算法有更强的瞬态响应能力。
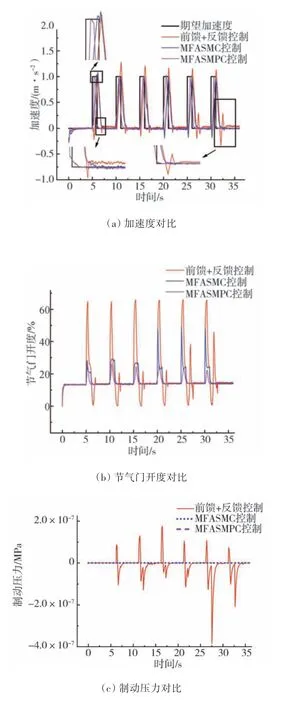
图9 对脉冲输入的响应
(4)综合工况实验
设置时长600 s的城市/乡镇综合工况,对比3种控制算法的抗扰动能力和燃油经济性。为此,对车辆纵向动力学系统施加以坡度、风阻和摩擦因数3个时变随机扰动。控制效果如图10所示,可以看出,前馈+反馈控制算法在外部扰动下的鲁棒性较差,超调量大,且抖动明显,不利于乘坐舒适性,节气门开度和制动压力的抖动也较为频繁,会影响驱动/制动执行机构的使用寿命。MFASMC算法提高了鲁棒性,MFASMPC算法加快了调节速度。综合工况的燃料消耗如图11所示。由图可见,MFAS-MPC控制算法不仅减少了加速度的抖动,还使燃油经济性略有改善。
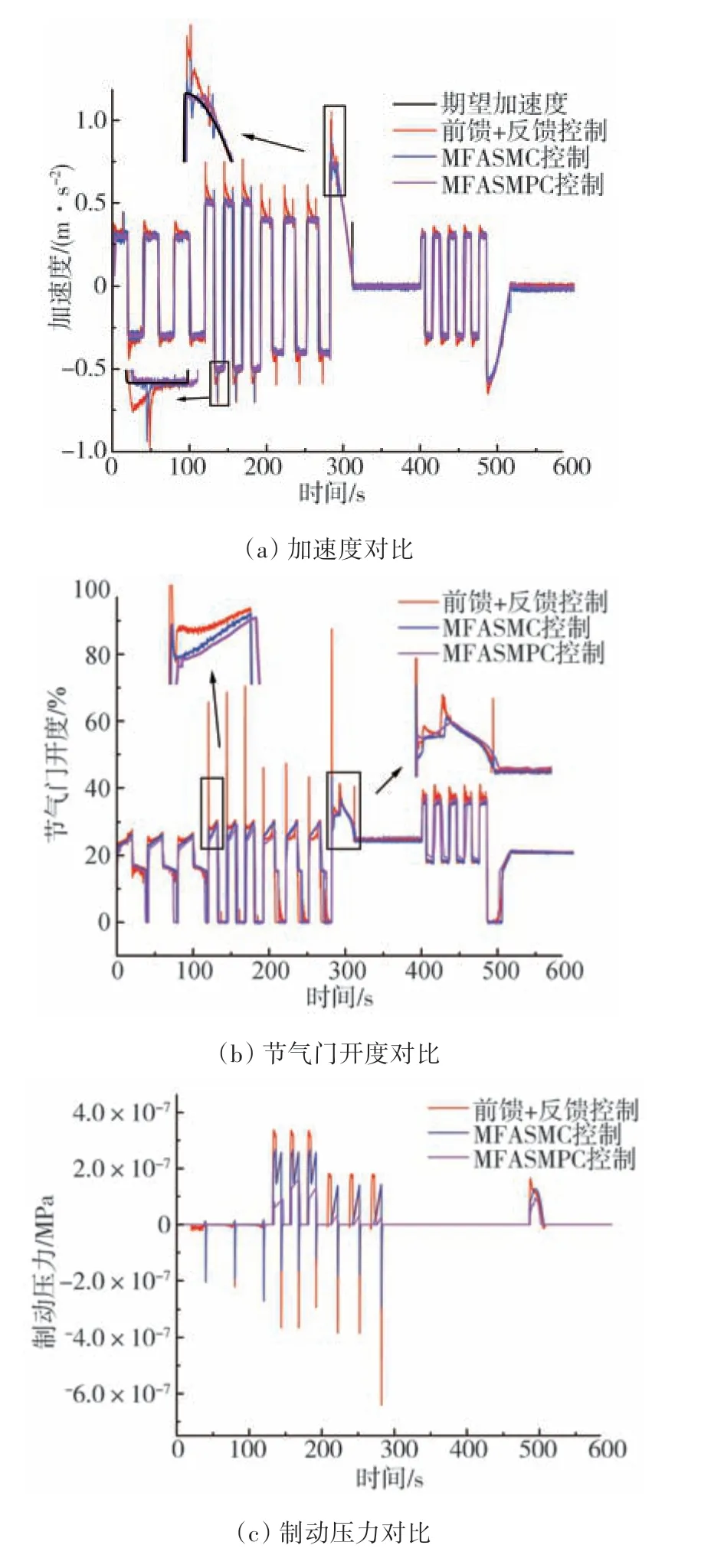
图10 综合工况仿真

图11 综合工况燃油消耗
5 硬件在环实验
以上仿真结果表明,MFASMPC算法优于前馈+反馈算法和MFASMC算法,为验证该算法在真实控制器中的控制效果,搭建了智能汽车纵向控制硬件在环(HIL)测试系统,包括HCU测试机柜、HCU-HIL上位机以及D2P快速原型控制器。采用MFASMPC算法进行硬件在环实验。在Motohark软件中搭建汽车纵向控制控制程序,并编译下载到D2P控制器中运行,将车辆模型编译下载到NI实时仿真机中运行,在上位机软件V-eriStand中进行系统配置,整体测试框图如图12(a)和图12(b)所示,测试结果如图13所示。
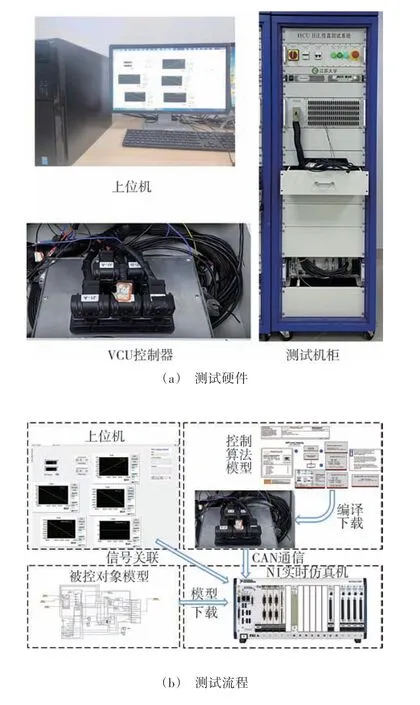
图12 HIL测试框图
对比图13和图10可以看出,与仿真相比,HIL测试的实车加速度数据精度较低,但也同样能很好地跟踪期望加速度。HIL测试的加速度轨迹与期望加速度基本吻合,未出现大的超调和振荡。另外,HIL测试的节气门开度与制动压力有一定的抖动,但在合理的范围之内,未出现传统前馈+反馈控制算法的超调和抖振,满足车辆行驶中舒适性与平顺性的要求。表明本文中设计的控制策略具有良好的控制效果。
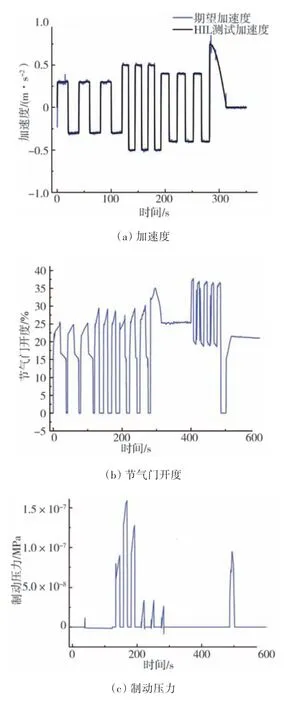
图13 HIL测试结果
6 结论
本文中基于MFAC与SMC、MPC算法,针对具有扰动的离散非线性纵向动力学系统,设计了智能汽车纵向动力学无模型控制方案,包括MFASMC与MFASMPC,前者旨在提高控制精度与鲁棒性,后者则在其基础上缩短调节时间,进一步改善控制效果。与基于模型的非线性系统控制算法相比,该方法仅依靠I/O数据,无须构建精准的纵向动力学模型,降低了纵向控制器设计难度。仿真和硬件在环实验结果表明,该设计算法可以准确跟踪输入的期望加速度信号,不仅调节时间短、超调量和振荡小,还对外部扰动有较强的鲁棒性,并使车辆的燃油经济性稍有改善。该方法简单可行,易于在其他各类工程场景应用。
