基于PSO-RBF神经网络的卫星定位补偿模型设计
2022-04-04王彦龙孟繁伦肖文飞
王彦龙 孟繁伦 肖文飞
摘要:随着北斗系统的完善,卫星定位得到了越来越多的应用。但是卫星定位信号易受到干扰,尤其是当行驶车辆处在比较复杂的道路中,使得定位发生漂移现象。针对此問题,提出了粒子群-径向基神经网络联合的车辆卫星定位模型。由于传统卡尔曼滤波不能较好地处理漂移点,通过神经网络阈值与车速、航向角以及经纬度之间的时序相关性,对定位车辆进行阈值判断,并且利用RBF神经网络进行训练,从而得到补偿模型,实现车辆位置的优化。实验表明,面对定位信号干扰,联合补偿模型可以提高车辆卫星定位的精准度以及可靠性。
关键词:卫星定位;粒子群;神经网络
中图分类号:TP18文献标志码:A文章编号:1008-1739(2022)04-66-5

0引言
车辆卫星定位不仅能够为车辆提供实时、准确的位置信息,还可以为车辆提供了导航及拥堵报告等服务。由于智能网联汽车技术的不断发展,汽车技术也随之对车辆定位提出了更高的要求,车辆的精准定位也成为了当前研究的热点。
目前车辆卫星定位的精准度在10 m左右,提高车辆卫星定位的精准度十分重要,卡尔曼滤波法和粒子滤波这2种滤波算法主要应用于卫星定位。韩佳琦等[1]对全球卫星定位导航系统进行了研究,并讲述了发展与应用。早期的卡尔曼滤波只能应用于线性系统的滤波,但是卫星定位系统是非线性系统,因此探讨非线性卡尔曼滤波算法就变得尤为重要。后来,发展出了扩展卡尔曼滤波。在使用卡尔曼滤波时,噪声统计是很难确定的,一般通过调整参数来决定滤波的效果,但不能完全保证滤波的稳定。为了克服滤波噪声的统计问题,高策等[2]提出了基于卡尔曼—高斯联合滤波的车辆位置跟踪算法;何瑞珠[3]等提出了分步加权解算的方法进行卫星定位;刘江等[4]对列车卫星定位系统使用了非参数贝叶斯模型的方法,提出了贝叶斯算法技术;陆德彪等[5]等基于最大偏差准则对车辆位置进行预测;冯志强等[6]等针对车载定位收到的干扰周期信号,提出了以时差型定位系统来校准卫星定位的误差分析的算法,也取得了不错的结果。
车辆在行驶过程中,卫星定位信号易受到各种因素的干扰,由于卡尔曼滤波等算法并不能得到很精准的定位精度,从而造成较大的定位误差。由此,本文提出了基于粒子群—径向基(RBF)神经网络联合方法,利用阈值对漂移位置进行识别,利用神经网络进行训练,得到补偿模型,实现车辆位置的优化和车辆的精准定位。
1基于粒子群—径向基神经网络联合卫星定位模型
卫星定位信号在恶劣的状况下易受到干扰,尤其是在车辆移动过程中,卫星定位信号经常会出现位置飘逸的现象,传统的卡尔曼滤波法,由于其算法的局限性,并不能很好地解决此问题。随着计算机技术的发展,人工神经网络等一些智能算法得到了广泛的应用。为了充分利用车辆的速度、加速度以及航向角等各个信息,提升定位系统对信息的利用率,建立基于粒子群优化算法[7]调整阈值的RBF神经网络的联合滤波模型,该模型既针对车辆移动状态信息设置了相关的动态阈值,可以有效地辨别车辆移动过程中卫星信号较大干扰引起的定位漂移点,而且还对车辆移动的历史轨迹数据进行样本学习,根据对车辆的历史信息得到预测模型,可以有效预测当前时刻车辆的真实位置。通过联合模型可以有效过滤行车状态漂移的噪声信号,对情况比较恶劣的漂移现象,也起到了很好的作用。基于粒子群—径向基(PSO-RBF)神经网络联合模型的卫星定位优化算法如图1所示。

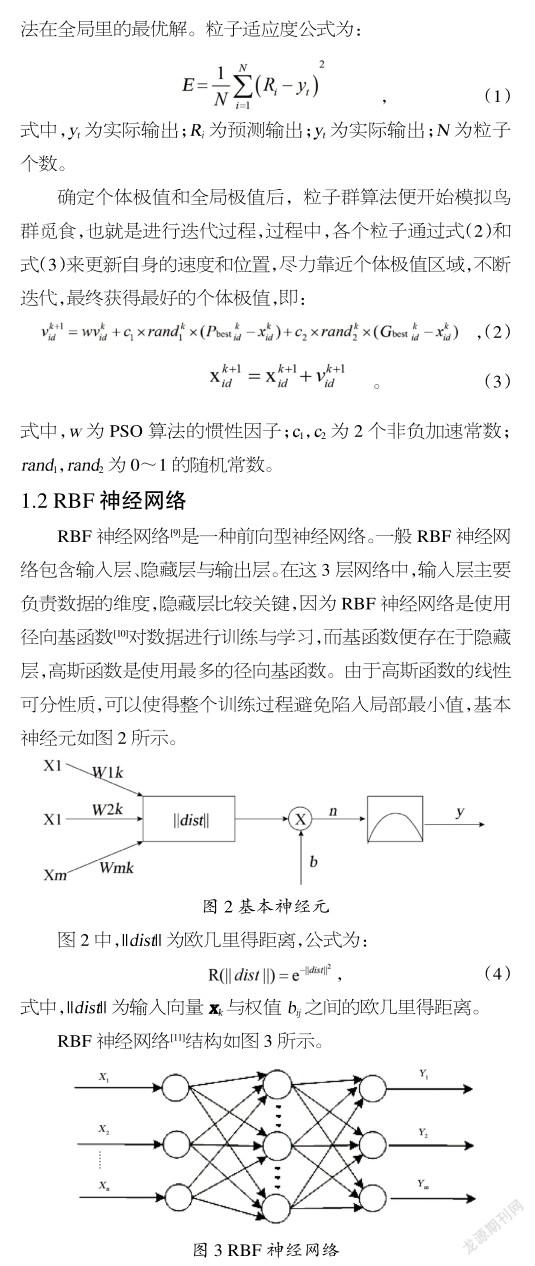
RBF神经网络由3层构成:
①输入层:是将归一化处理过的数据样本输入到网络节点,通过归一化处理,避免运算过于复杂。之后传递到隐藏层。
②隐藏层:节点基函数通常选择高斯函数,节点的个数通常通过对比实验确定。

2联合模型处理过程
利用动态阈值与车辆状态之间的相关性,进行定位漂移点的识别;然后,利用RBF神经网络对车辆历史轨迹数据进行自适应学习训练,对车辆移动的真实卫星定位进行预测;最后,通过预测值和真实观测值建立观测补偿,建立PSO-RBF补偿模型进行车辆定位的联合,从而提高车辆移动卫星定位的准确性。PSO-RBF联合模型算法流程如图4所示。
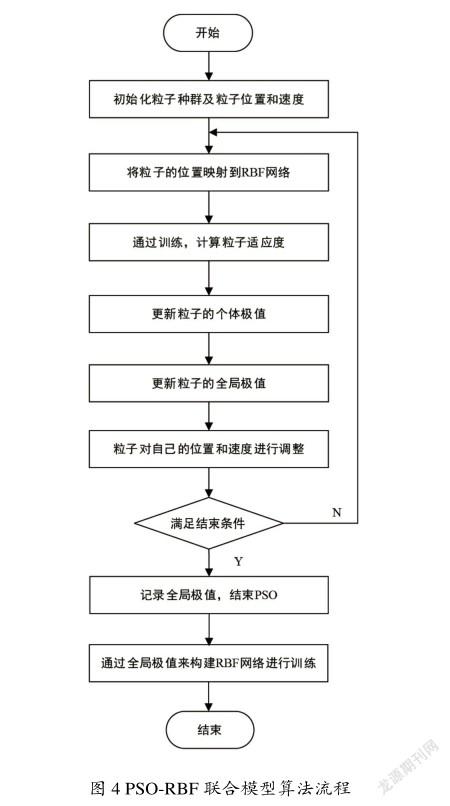
具体流程如下:
①对样本数据进行归一化处理。
②初始时间0,初始化粒子种群,设定最大迭代次数。
③计算初始化种群的粒子适应度值,将极值带入RBF神经网络,并构成网络的参数和结构。
④通过式(5)计算RBF神经网络的预测输出()。
⑤依据预测输出(),根据式(1)计算各个粒子适应度值。
⑥记录得到各个粒子的适应度值,并进行适应度值排序。
⑦筛选出当前状态情况下适应度值最好的粒子,以及最好的适应度值,并记下最好位置。
⑧进行粒子的速度和位置的更新,产生新的种群,初始化种群。
⑨若寻优达到最大迭代数,则结束;跳转执行步骤⑩;否则,次数= +1,跳到步骤③,继续执行。
⑩达到最大迭代次数,得到最优值输出,得到最优的RBF神经网络的权值与阈值。通过式(5)得到联合模型的最优预测输出。
3实验
车辆行驶中的轨迹是连续不断的,车辆下一刻的位置与车辆当前的位置以及行驶状态是有关联的。车辆下一刻的位置,可由当前的位置信息和行驶状态推算得到。因此,下一时刻车辆位置实际观测值与预测值的误差至关重要。通过对采集的数据进行处理,通过事物发展趋势的相关性,得到事物的未来预测值,是数据处理的一种应用形式。
本文基于PSO-RBF神经网络联合模型采用实车数据验证,使用的是STC12C5A32S2型号的单片机,使用它控制卫星接收模块UM220-III的卫星定位的接收机(接收模块能够同时接收GPS和北斗信号)。各接收模块主要负责获取实时位置的经纬度信息以及标准时间,同时具有显示功能。数据采集模块如图5所示。

为了验证联合模型在卫星定位精度及其可靠性方面的优势,实验中采用了实车测试,采集卫星定位的经纬度、方向角以及速度信息,采集周期都设为0.2 s,采集设备拥有0.02 m的定位精度。并进行了对比实验,比较采集的原始卫星定位信息、卡尔曼滤波法、基于PSO-RBF神经网络联合模型法的定位精度,进行定位精度及其可靠性的对比,数据采集路线如图6所示。

数据预处理是对数据处理的重要前提,实验为北斗导航系统接收机的数据坐标,属于时序性数据,数据的预处理主要包括数据清洗和数据归一化处理。
PSO-RBF神经网络联合模型对定位信息的数据进行时间序列预测,具体步骤如下:
①将测得车速、航向角、经纬度的200组数据进行数据预处理。
②输入输出的选择。实验是对数据中各种属性的数据进行时间序列预测模型的研究,为保证融合模型的精准度,设计只有一个输出单元(),以()作为输入,为历史数据长度,网络的预测模型的输出表示为:()=((-),(- +1),…,(-1))。
由于时间序列与各个影响因素都有关,本身预测就比较复杂,采用不同数据间隔长度的预测模型,结果相差很大。通过反复试验,不同数据间隔长度的预测均方根误差不同,根据实验表明,以14组数据长度间隔的预测模型误差最小,所以选取历史长度为14组的预测模型。
③设置网络参数,包括隐藏层节点数、传递函数、SPREAD值、最大迭代次数和期望误差。表1给出了不同的隐藏层节点个数所对应的网络输出的均方误差。

从表1可以看出,当隐藏层节点个数设为1时,RBF神经网络预测输出的均方误差最大,主要因为节点个数过小,RBF神经网络学习样本的过程不够充分。当隐藏层节点个数为10,网络训练的均方误差最小,因此也可以得出网络的性能最好。
④初始化网络,输入训练样本,进行训练。
⑤达到期望误差或者最大迭代次数,RBF网络训练停止,输出3个重要参数值。
⑥利用3个参数值,通过式(5)得到融合模型;进而,进行速度、航向角和經纬度的时间序列预测。
通过融合模型,对各种属性的时间序列进行测试,得到预测的数据,最终得到卫星定位的最终预测值,与卫星定位的值对比,弥补由于信号干扰造成的位置漂移现象。
定位纬度效果图如图7所示。由图7可见,卡尔曼滤波法对于车辆卫星定位过程中发生定位漂移现象的处理效果不好,而联合模型的处理是通过动态阈值识别定位中的漂移位置信息,并进行网络训练学习处理,结合上一时刻的观测值以及模型的预测值进行观测补偿。联合模型的处理效果明显好于卡尔曼滤波处理的结果。

根据图8可以看到,PSO-RBF神经网络模型测试误差在训练次数为50之后已达到最小值,并且随着训练次数的增加,模型的误差一直处于2种算法的最小值;卡尔曼滤波算法的误差一直比联合模型大,并且随着训练次数的增加,误差变大。
2种算法的训练误差随训练次数的变化如图8所示。

表2是2种方法与真实观测值的误差对比结果。可以明显看出,卡尔曼滤波法与联合模型法对卫星定位的精度都有改善。平均误差是反映定位精度的一种数据,联合模型的平均误差比卡尔曼滤波法降低了0.11 m,定位精度提升了30%;联合模型最突出的优点降低;而最大误差,由原始数据的9.8 m降低到1.3 m,反映出联合模型优秀的处理效果;标准差体现了方法的综合性能,也可以看出联合滤波有很好的效果。因此,联合模型法提高了卫星定位的精准度,可以有效处理卫星定位漂移点,进而增强了卫星定位的抗干扰能力。

4结束语
本文对车辆行驶中的卫星定位信号被干扰进而产生位置漂移的现象进行了研究,提出了PSO-RBF神经网络的联合模型。针对传统卡尔曼滤波不能较好处理漂移点,本文通过阈值与车速、航向角以及经纬度之间的时序相关性,对定位车辆进行阈值判断;并且利用RBF神经网络进行训练,从而得到补偿模型,实现车辆位置的优化。实验表明:面对定位信号干扰,联合补偿模型可以提高车辆卫星定位的精准度以及可靠性。
参考文献
[1]韩佳琦,李鹏程,姜辉.GPS全球卫星定位导航系统的发展与应用[J].化工管理,2017(5):194.
[2]高策,褚端峰,何书贤,等.基于卡尔曼—高斯联合滤波的車辆位置跟踪[J].交通信息与安全,2020,38(1):82-89.
[3]何瑞珠,刘成,黄康.卫星定位中的一种分步加权解算方法[J].天文研究与技术-国家天文台台刊,2015,12(1):36-43.
[4]刘江,陈华展,蔡伯根,等.基于非参数贝叶斯模型的列车卫星定位方法[J].铁道学报,2020,42(1):59-68.
[5]陆德彪,唐德璋,蔡伯根,等.基于最大偏差准则的列车卫星定位完好性监测方法[J].铁道学报,2019,41(6):81-90.
[6]冯志强,胡丹晖,周学明,等.基于北斗卫星定位的杆塔基础位移监测与预测技术[J].高电压技术,2018,44(zk2):53-56..
[7]陈玲君.基于改进的粒子群算法在WSN节点定位中的研究[J].微型机与应用,2016,35(24):70-72,76.
[8]孙俊.量子行为粒子群优化算法研究[D].无锡:江南大学, 2009.
[9]褚福运,仲政.基于径向基函数的薄板弹性稳定性分析[C]//中国计算力学大会2014暨第三届钱令希计算力学奖颁奖大会论文集.贵阳:出版社不详,2014:1446-1461.
[10] INBARANI H H,AZAR A T,JOTHI G.Supervised Hybrid Feature Selection Based on PSO and Rough Sets for Medical Diagnosis[J]. Computer Methods and Programs in Biomedicine,2014,113(1):175-185.
[11] MAIND S B,WANKAR P. Research Paper on Basic of Artificial Neural Network[J]. International Journal on Recent and Innovation Trends in Computing and Communication, 2014,2(1):96-100.
