基于TDLAS技术的海水中溶存CO2原位测量实验研究
2022-04-02杜保鲁郭金家张志浩叶旺全郑荣儿
杜保鲁,李 萌,郭金家,张志浩,叶旺全,郑荣儿
中国海洋大学信息科学与工程学院,山东 青岛 266100
引 言
海洋作为自然界中重要的碳汇[1],据统计平均每年吸收了CO2排放量的23%[2],虽然减轻了气候变化对陆地生态的影响,却导致了海洋的酸化问题。 测量海水中溶存CO2的动态对研究海水与大气之间的碳循环过程,应对全球气候变暖状况以及预防海洋酸化都至关重要。 海洋中,尤其是深海复杂多变的环境和气液分离的特殊性,对溶存气体的测量技术提出更高的要求。 目前针对CO2(seawater)的测量技术主要有电化学法[3]、质谱法[4]、拉曼光谱[5-6]和红外吸收光谱[7-9]等,其中电化学法通常含有有毒有害材料,重复性较差;质谱法仪器体积质量较大,很难实现原位测量;拉曼光谱灵敏度较低,有时不能满足探测要求。 可调谐半导体激光吸收光谱(tunable diode laser absorption spectroscopy, TDLAS)作为广泛应用于气体测量的吸收光谱技术之一,因环境适应性极好、选择性好、可靠性高、成本低,因此具有应用到水中溶存气体原位测量的潜力[10]。
实现水中溶存气体的原位测量,气液分离是关键性的技术,即将溶解在液体中的气体抽离出来再进行测量。 在平衡条件,溶存气体在液体中的浓度和分离出的气相浓度遵守亨利定律,即测量得到的溶存气体的气相分压值与其液相浓度成正比,比例系数为亨利系数。 针对液体中溶存气体的分离,较为常用的方法有水气平衡器[11-12]、中空纤维膜接触器[13]和渗透膜[14-16]。 其中水气平衡器无法实现水中原位测量;中空纤维膜接触器虽响应速度较快,但无法直接承受深水区的高压,且需要定期更换。 现在比较成熟的水下商业化仪器均使用渗透膜,即具有出色气体渗透性和化学耐受性的防水透气膜,来实现水气分离。
本工作将渗透膜脱气技术与实验室研发的TDLAS气体探测样机相结合,实现了海水中溶存CO2的原位探测。 通过实验室样机误差校正实验、码头时间序列测试以及东海海域适应性测试,验证了水中CO2原位测量样机性能的稳定性与实用性。
1 测量原理和样机介绍
1.1 测量原理
根据Lambert-Beer定律,激光在穿过气体介质后,其光强变化为
(1)
式(1)中,It为透射光强,I0为初始光强,S(T)(cm-2·atm-1)为吸收谱线强度,可在HITRAN数据库中查询,g(ν)(cm)为线型函数,P(atm)为压强,c为待测气体体积浓度,L(cm)为吸收路径长度。
在HITRAN数据库中查询到的谱线强度S1(T)的单位为cm-1·(molecule·cm-2)-1,而式(1)中的S(T)单位为(cm-2·atm-1),因此要进行单位转换,具体如式(2)
(2)
式(2)中,NA=6.02×1023molecule-1为阿伏伽德罗常数;R=0.082×10-3m3·atm·K-1·mol-1,称为普适气体常量;T为气体温度,单位为K。
将式(1)两边取对数运算后在整个频域内积分,可得
(3)
因为线型函数g(ν)在整个频域上的积分恒为1,因此气体浓度的计算表达式为
(4)
由式(4)可知只要得到气体吸收峰面积A,吸收谱线强度S(T),气体压强P和光程L,就可以计算出待测气体的浓度c。

图1 样机获取的CO2典型吸收光谱图Fig.1 Typical absorption spectrum of CO2 obtainedby the prototype
1.2 水中溶存CO2原位测量样机
图2(a)所示为水中溶存CO2原位测量样机结构图。 由于水下环境复杂多变,样机除了要性能优良(准确性好、及时响应、长期工作稳定)外,还需要有良好的密封性、耐压性与耐腐蚀性。 为保证样机在水下环境中的长期稳定运行,样机整体被设计为一个铝合金密封舱结构(φ210 mm×620 mm),通过水密电缆来进行供电和与上位机数据通讯。 图2(b)为样机内部原理图,小型商业化激光控制器(Thorlabs,CLD1015)输出50 Hz锯齿波,控制可调谐二极管激光器(Nanoplus,DFB-2004-3)在中心波数4 990 cm-1左右1.2 cm-1范围内扫描,可覆盖CO2的两条吸收谱线。 激光经准直后,进入小型化气体吸收池,多次反射后,透射出的吸收信号经红外探测器(Thorlabs,PDA10D-EC)探测,并由小型嵌入式计算机(PCM-3365,Advantech)采集。 为防止水气的影响,可使脱出气体先经过干燥管进行水气去除后再进入到气体吸收池内被测量。
为达到在深水区长期探测的目的,样机使用渗透膜实现水气分离。 渗透膜规格为直径80 mm,厚度70 μm,材料为Teflon AF-2400 X,具有优秀的耐压性与透气性,并可通过外部水泵控制与膜接触的液体流速来提升脱气效率。 具体脱气流程为: 外界自然流动的水体流经渗透膜,因渗透膜两端压强及浓度梯度差异,水中的溶存气体便会自然渗透到样机内。
渗透膜的响应时间较慢,除去水体流速、膜透气效率等不可控因素的影响,还与气体吸收池内部所需气体量有关。 为尽可能提升样机在水下的响应速度,设计了一种小型化密封式气体吸收池,如图2(b)中所示。 其整体规格为φ50 mm×130 mm,内部所需气体量仅为24 mL,极大的降低了对脱气量的要求。 激光可在两片球面反射镜(D=12.7 mm,f=50 mm,R>97.5%@2 004 nm)之间往返约40次,光程可达8 m,满足探测要求。 气体吸收池上附有温度与压力传感器(Panasonic,DP101),可实时记录腔内气体的温度与压力变化。

图2 基于TDLAS的水中溶存CO2原位测量样机结构图(a)和原理图(b)Fig.2 Structure diagram (a) and schematic diagram (b) of the in-situ detectionprototype based on TDLAS for dissolved CO2 in water
在实际应用中,由于样机中探测器件的性能问题和环境噪声影响,另外拟合吸收峰面积时也存在误差,这些原因都会导致计算出的浓度与实际浓度有所偏差。 因此对样机做相关的误差分析,从而校正反演的浓度值是非常必要的,接下来将针对这一部分工作进行介绍。
2 结果与讨论
2.1 样机校正
为了检验浓度反演算法的可行性,使用样机分别对5种不同浓度(202.8×10-6,503×10-6,802×10-6,1 006×10-6和2 019×10-6)的标准CO2气体进行测量,样机的采样率为10 s,选取了位于4 993.74 cm-1的吸收峰进行拟合计算。 由式(4)可知,在温度、压强与吸收光程相对不变时,气体浓度与吸收峰的面积成正相关关系。 图3所示为获取的5种标准气体浓度的测量结果,横坐标为波数(cm-1),纵坐标为经Lorentz线型拟合后的吸收峰强度,从图中可以看出,随着标准气体浓度的增大,吸收峰强度也随之变大,两者具有明显的相关关系。 插图为吸收峰的面积与气体浓度值的线性拟合结果,两者线性度极好,相关系数可达0.998 5,证明了浓度反演算法的可行性。
为减小样机误差对测量值的影响,使测量浓度值更加具有可信性,利用不同浓度的标准CO2气体对样机做了必要的校正实验。 如图4(a)所示,取每种浓度测量值相对稳定的阶段求得平均值,并与标准气体浓度值做线性拟合,可以看出,测量值与标准值之间的线性度良好,相关系数达0.999 4。 图4(b)为测量值的相对误差在测量范围200×10-6~2 000×10-6内,最大相对误差小于8%。 图中拟合公式中的变量x表示样机测量浓度值,变量y表示浓度实际值,通过拟合公式便可以将样机的直接测量值反演到环境中气体浓度的实际值,从而消除样机硬件噪声导致的测量误差的影响,也证明了样机具有应用到水中溶存气体测量的潜力。
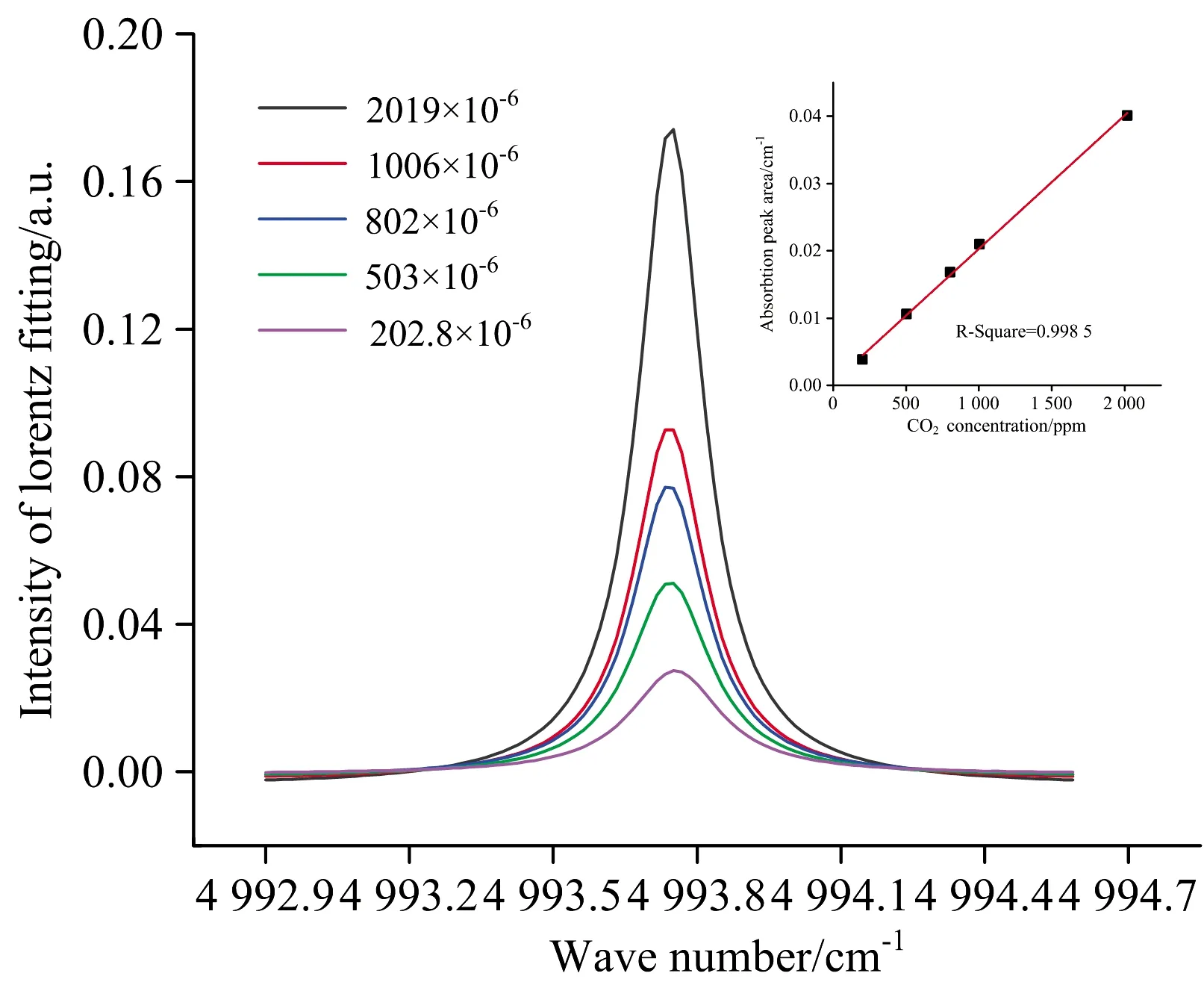
图3 不同标准CO2气体浓度值与吸收峰面积的线性拟合
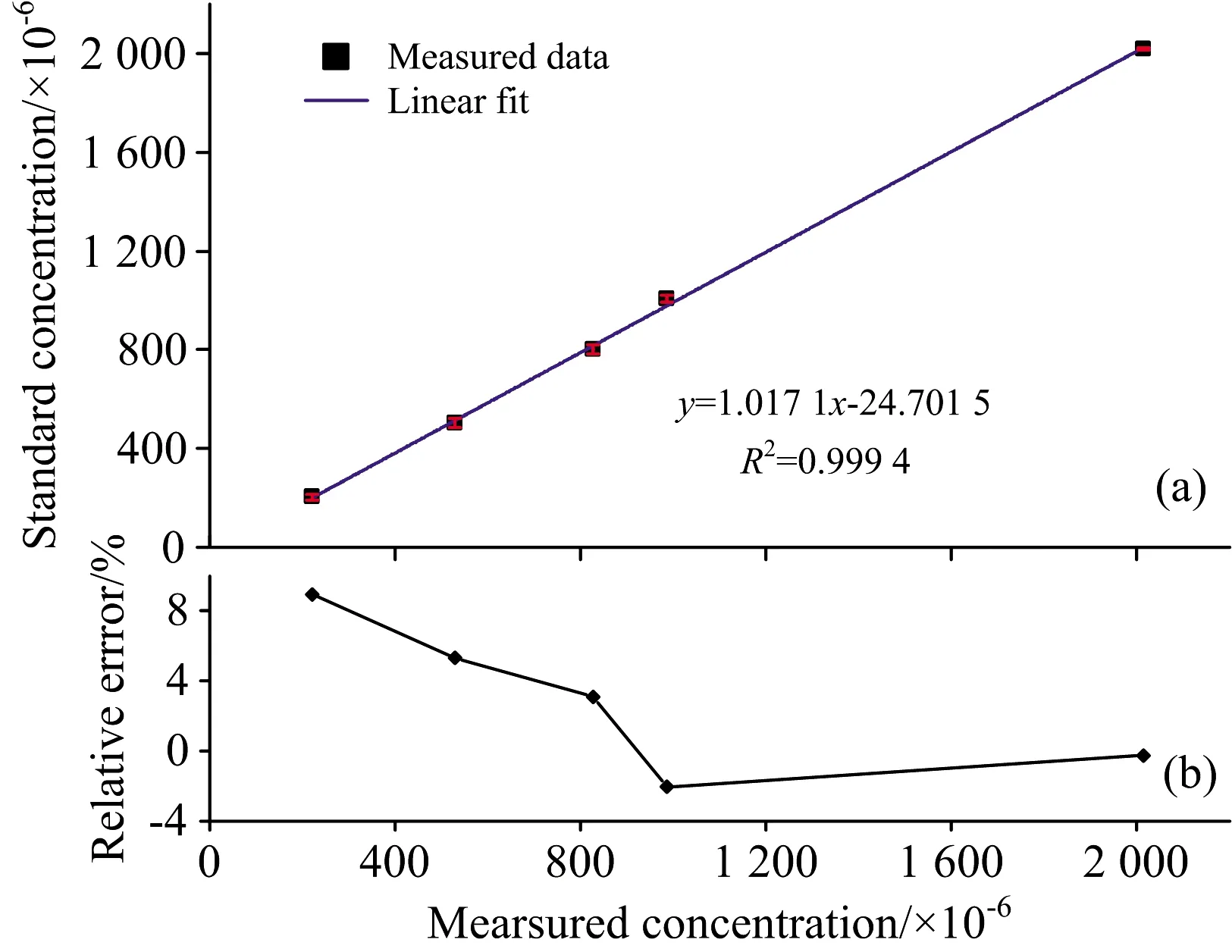
图4 不同标准CO2气体浓度与测量值的线性拟合(a)和相对误差(b)
2.2 样机稳定性实验
为了评估样机长时间工作的稳定性,同时计算样机的随机误差。 使用样机对浓度为802×10-6ppmv的标准CO2气体进行了30 min的连续测量,样机采样率设置为10 s,在测量时间段内共获取到180个数据点,如图5(a)所示。 在测量时间内,浓度平均值为802.6×10-6,变化区间为797×10-6~807×10-6,其差值约为10×10-6,并没有很大的波动,证明了样机长时间工作的稳定性。
图5(b)为测量浓度值的频率分布直方图,可以看出其符合正态分布,使用高斯随机误差分布方程进行拟合,方程式如式(5)
(5)
可知,σ=2.06×10-6,因此样机的极限随机误差为Δ样机=3σ=6.18×10-6。 根据测量不确定度定义,可以计算出样机的测量结果Y为式(6), 即对应环境中CO2气体的浓度值
(6)
如图5(a)红色虚线所示,图5(b)测量值的相对频率分布图样机在此范围内的测量值均可信,同时可以计算出样机的精度约为0.5%,满足水下探测的要求。

图5 样机对802×10-6标准浓度CO2气体连续测量30 min的结果(a)和测量值的相对频率分布图(b)Fig.5 The measured results (a) and relative frequency distribution (b) of 800×10-6 standardCO2 gas for 30 minutes by the prototype
2.3 样机现场实验
2.3.1 码头时间序列测试
为检验样机在水中工作的性能,选取近海码头(水深3 m)作为实验地点,测量时间从2019年1月20日5:00到1月21日5:00,共进行了持续24 h的观测,样机采样率为1 min。 图6所示为水中溶存CO2原位测量样机获得的数据,虚框中为样机从入水到下放到3 m深度的浓度变化数据,可以看出样机入水后浓度值有明显升高。 从数据来看,从2019年1月20日6:00到1月21日5:00,样机显示的浓度值为水中溶存的CO2浓度,CO2浓度从初始的403×10-6上升到最高448×10-6,整体上水中的CO2浓度高于大气中CO2浓度,证明实验水域有吸收大气中CO2的源汇作用。 从样机性能分析,在整个测量时间段内,样机一直保持着稳定的工作,而且对于水中CO2浓度的微小变化也有所反映,证明样机具有水下长时间工作的能力。
2.3.2 海上适应性测试
为检验结合渗透膜的样机在较深水域的性能,于2019年7月2日选取东海海域进行了海上适应性测试。 图7为海试地点的站位信息图,共选取了5处不同深度的区域进行了测试,各站位深度信息如图7所示。
图8(a)为水中溶存CO2原位测量样机在A3站位(下放深度20 m)获取的溶存CO2气体的典型吸收光谱,证明了样机在30 m浅水域的工作适用性。 为进一步提高测量的灵敏度,采用二次谐波调制原理对数据进行了二阶差分[17]。 如图8(b)所示,可以看出经过差分运算之后,在两个吸收峰位置4 992.51和4 993.74 cm-1处,其二阶差分值相较于旁边数值均有明显的变化,证明了谐波调制技术对微弱信号的提取与噪声的消除具有突出作用。 下一步工作将针对谐波调制技术做一些研究,改进样机性能,提高样机的信噪比。
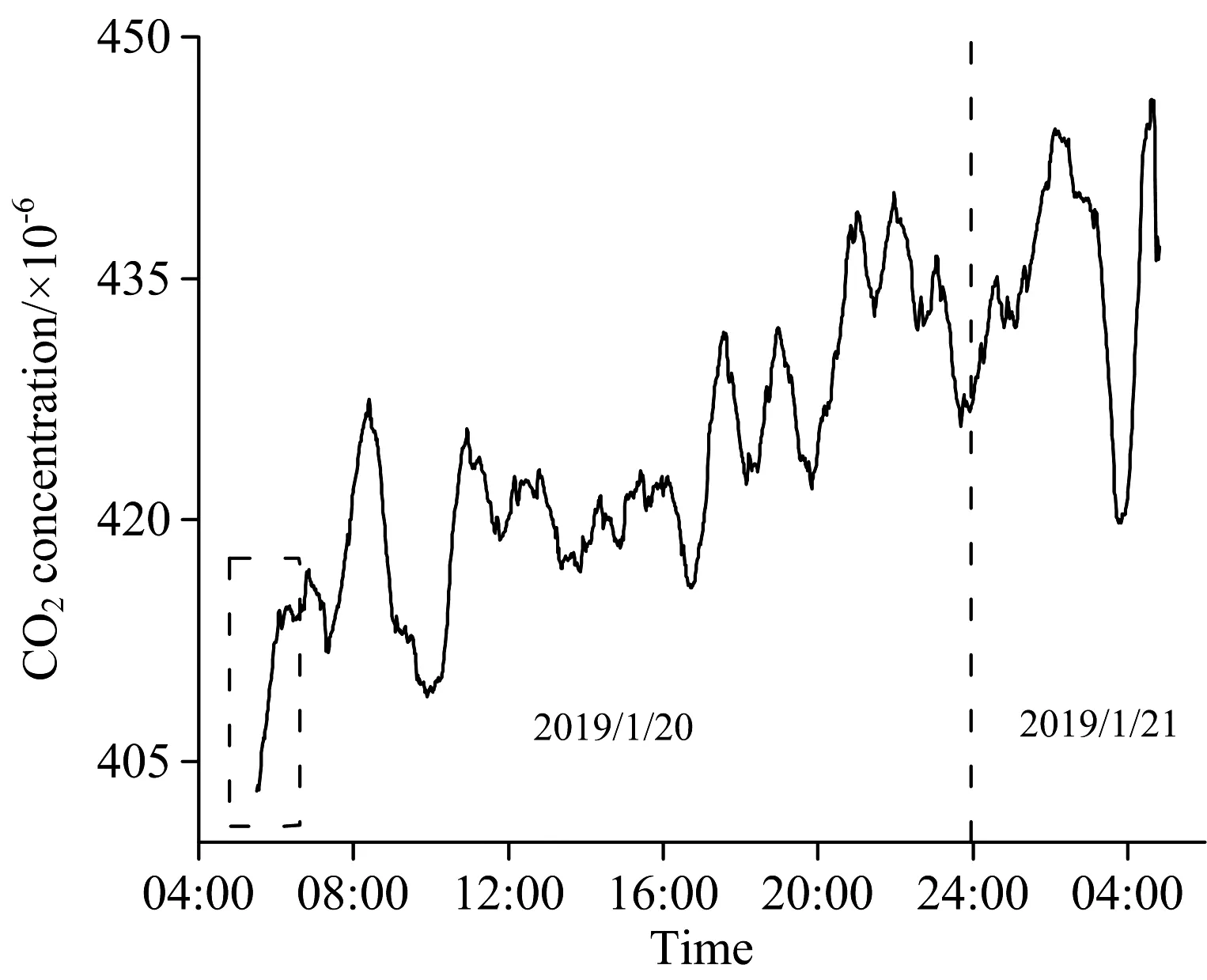
图6 样机码头时间序列测试结果Fig.6 The time series test results of the prototypefor pCO2 in pier

图7 海试地点站位信息图Fig.7 The testing stations information ofthe prototype in the east China sea

图8 样机在水深20 m处获取到CO2的典型吸收光谱图(a)和对应吸收峰处的二次谐波图(b)
3 结 论
为验证将TDLAS技术应用到海洋中溶存CO2原位探测的可行性,将渗透膜脱气技术与实验室研发的TDLAS气体探测样机相结合,实现了海水中溶存CO2的原位探测。 经实验室校正与稳定性实验,样机在200×10-6~2 000×10-6的测量范围内,测量浓度值与标准气体浓度值线性相关度R2为99.94%,最大相对误差小于8%,精度约为0.5%,满足于水中气体探测的要求。 通过码头现场时间序列测试,证明该样机长时间工作性能稳定,具有测量海水中CO2动态的能力。 为验证渗透膜在较深水域的性能,在东海海域对样机进行测试,并成功获取到CO2的典型吸收谱,证明了样机在30 m以浅水域的工作适应性。 后续工作将利用谐波调制技术针对样机噪声的消除,提高其灵敏度,并将其搭载在海上相关平台上,如浮标、ROV上进行相关的测试。