距离约束分簇策略下无人机群空地组网性能分析
2022-03-30姚媛媛乌云嘎董瑶瑶冯志勇尉志青
姚媛媛 乌云嘎 董瑶瑶 冯志勇 尉志青
①(北京信息科技大学信息与通信工程学院 北京 100101)
②(北京邮电大学泛网无线通信教育部重点实验室 北京 100876)
③(北京信息科技大学现代测控技术教育部重点实验室 北京 100101)
1 引言
随着移动通信技术的发展,对未来6G网络的服务广度提出了新的挑战[1]。“万物互联”时代的到来,使得各种物联网应用已经实现落地,同时带来的一大问题便是终端的能量消耗较快,尤其对于地况情形复杂且偏远的区域,无法进行基础设施的布设,且传统的更换电池方式或者手动充电存在人力开销大、成本高等瓶颈问题。在该背景下,低功耗物联网(Internet of Thing, IoT)节点的供电问题变得越来越重要。文献[2]证明了远距离射频能量可以转换为直流电压,并且所产生的电能可以为低功率设备供电。无线能量传输 (Wireless Power Transmission, WPT)使用射频技术,通过电磁场或电磁波进行能量传递,省去了电线布设的成本,使得IoT设备充电变得更加方便高效。WPT技术的发展使得低功耗广域网络 (Low-Power Wide-Area Network, LPWAN)节点的供电问题得到不断改善。文献[3,4]提出了利用WPT技术能够有效提升远程设备的供电效率,并且通过射频(Radio Frequency, RF)能量收集 (Energy Harvesting, EH)技术延长了网络的生命周期。
另外,由于无人机 (Unmanned Aerial Vehicle,UAV)具有灵活的移动性以及良好的对地视距链路。因此在缺少基础设施和人力资源的偏远地区,为了解决网络节点供电问题,UAV可以实现按需部署,为地面IoT节点提供能量需求。文献[5]构建了一种支持UAV的无线能量传输网络。该网络将WPT过程与无线信息传输 (Wireless Information Transmission, WIT)过程分开进行,物联网设备首先通过从无人机发送的射频信号中收集能量,随后再利用收集的能量向目标节点发送信息。仿真结果表明,相比于固定的混合接入点,部署无人机作为移动的混合接入点,并通过凸优化手段优化无人机的轨迹,可以更加有效地提升网络吞吐量。文献[6–8]考虑了启用UAV的移动边缘计算系统,通过优化无人机轨迹最大限度地降低无人机能耗。然而,以上文献考虑的大多为单无人机部署的场景。
文献[9–11]研究了多无人机覆盖问题,通过优化UAV 3维部署,提高了网络平均容量。文献[12,13]提出了一种基于能量收集技术的多UAV中继网络,以克服源节点与目的节点之间的大幅度信号衰减,并实现绿色协作通信,可以有效地提高系统吞吐量。
然而,使用更具有随机性的泊松点过程对网络进行建模,能够更加直观有效地评估网络的性能[14]。文献[15,16]研究了齐次泊松点过程 (Homogeneous Poisson Point Process, HPPP)建模的无人机辅助蜂窝网络的覆盖概率,通过设计无人机的最佳飞行高度和分布密度,实现网络覆盖概率最大化。但是实际上,无人机覆盖区域内用户的分布通常更加密集地集中在UAV服务区域附近。文献[17]考虑对无人机和用户的位置重新进行群集配置,引入泊松聚类过程并应用于无人机和用户的位置建模中。该文献对上述齐次泊松点过程进行了改进,引入了两种新的用户位置部署方案,分别是Thomas集群过程和Matérn集群过程,分析了覆盖概率随用户密度的变化情况;采用Matérn聚类过程 (Matérn Cluster Process, MCP)对无人机和用户的位置进行部署,即用户均匀分布在以无人机投影点为中心,以Rc为半径的圆形覆盖区域内,但对无人机的覆盖区域重叠的问题并未涉及。文献[14]将无人机和地面基站的位置分别建模为Poisson点过程,并根据Poisson聚类过程将用户分布在无人机的投影位置的周围,使用随机几何工具,可以获得整个网络的覆盖概率以及区域频谱效率。但对UAV群与大规模IoT节点同时采用MCP建模会产生无人机基站覆盖冗余的问题,从而导致资源浪费。
考虑到实际环境中对大规模无人机基站的分布进行建模,站点过近易造成通信干扰。为解决上述问题,本文提出距离约束分簇策略 (Matérn Cluster under Distance Constraint, MCDC)。与MCP[1]建模不同的是,本策略将带有距离约束的Matérn集群过程用于UAV和地面IoT节点建模。主要的创新点总结如下:
(1) 分析了无人机利用射频信号传输技术辅助能量受限的IoT节点通信问题,提出了新颖的MCDC策略,为避免实际环境中无人机部署的覆盖冗余,降低无人机站点之间的干扰,本策略使用带有距离约束的Matérn集群过程对UAV和地面IoT节点进行建模,研究了无人机空地通信中大规模簇间干扰对上行网络中断性能和吞吐量的影响。
(2) 将每个无人机的服务集群划分为两类区域,分别是覆盖区域和满电区域。在下行WPT阶段,无人机对满电区域内的IoT进行充电,当IoT在一定时间内达到满电状态后,则在上行WIT阶段进行数据传输。下行链路IoT节点充满电的时间取决于满电区域的动态半径,并且通过调整充电时间或者满电区域半径优化上下行时间分配比,以提升系统吞吐量。
(3) 基于所提的距离约束分簇策略,综合分析了UAV的发射功率、时间资源分配比、IoT密度和干扰路径损耗指数等参数对中断性能和网络吞吐量的联合影响,进而通过参数配置优化网络性能,为未来6G无人机辅助通信组网提供了一定的参考价值。
2 系统模型
使用Matérn聚类随机部署多个大功率站点,会造成区域冗余覆盖。考虑到在实际环境中,为避免资源浪费和降低站点之间的相互干扰,针对无人机辅助能量受限的IoT网络数据传输问题,提出了MCDC策略。无人机和地面IoT节点被建模成带有距离约束的Matérn集群过程。通过对Matérn簇添加距离约束,使得各簇之间存在制约关系,互不相交。
UAV群的分布服从密度为λu的HPPP,其中IoT节点均匀分布在以UAV投影点为中心,R为半径的圆形区域中;Φ表示IoT节点集合,在一个UAV簇内,节点数服从泊松分布,密度为λI。UAV在下行链路利用WPT技术为能量受限的IoT节点提供能量支持。IoT节点从无人机的射频信号中收集能量并达到满电状态后,在WIT阶段将自身数据上传至无人机。假设系统的总执行时间为T,下行链路充电时间为τT,上行链路传输时间为(1–τ)T,其中τ为时间资源分配比(0<τ<1)。为了体现系统参数对网络性能的具体影响,接下来随机选择一个簇作为典型簇进行分析,对于要分析的UAV记为M,Φa={1,2, ···,i}为M所服务的簇内IoT节点集合,同时用Φb=ΦΦa表示簇外IoT节点的集合。
2.1 空地信道模型
无人机辅助地面节点数据传输,由于地面障碍物的存在,无人机与IoT节点之间的链路连接既有视距链路 (Line of Sight, LoS),也有非视距链路(Non Line of Sight, NLoS)[18–20]。考虑用g表示快衰落莱斯信道功率增益,并由LoS分量gLoS和NLoS分量gNLoS组成。因此,空地信道增益h可以表示为

其中,R表示莱斯因子,定义为LoS路径信号的功率与多径分量功率之比,R的取值趋于0表示一种散射场景,近似为瑞利衰落,R趋于无穷表示LoS信道模型[20];d表示无人机与IoT之间的距离;β表示路径损耗指数。
2.2 距离约束分簇策略(MCDC)
前文提到,使用传统的泊松点过程并不能较为有效地建模无人机空地3维网络结构。因此,引入MCP策略对无人机和用户进行部署以更准确地描述节点分布[21]。然而,随着节点数目的增加,使用MCP策略对无人机和IoT节点进行位置建模,会出现无人机区域冗余覆盖的情况,并且处于冗余覆盖区域中的IoT将会对其他无人机接收信号造成强烈的传输信号干扰。如图1(a)所示,使用MCP策略对无人机和IoT进行部署。不仅会出现区域冗余覆盖,造成无人机的额外能量损耗,同时会造成簇间较强信号干扰。因此,考虑使用MCDC策略对无人机和IoT空地网络进行建模,如图1(b)所示,将带有距离约束的Matérn集群过程用于表征实际部署的无人机网络。本文将无人机投影点之间的距离记为Δ= 2R+L(L>0)。其中R为簇半径(见图1(b)),L>0则保证两簇之间没有重叠。
对于带有距离约束的Matérn集群过程,如图1(b)所示。A点是典型无人机M的簇内覆盖IoT节点,A ∈X(OM,R),X(OM,R)表示以无人机投影点OM为中心,R为半径的圆。B点表示除典型
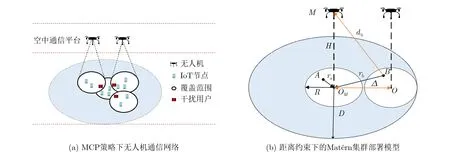
图1 系统模型
无人机M之外的其他无人机覆盖的IoT节点,即簇间干扰节点,B ∈X(OM,R,D),X(OM,R,D)表示以OM为中心,R ≤rb≤D的圆环,表明其他干扰节点位于典型无人机M的覆盖区域外,即两簇之间互不重叠。其中D=Δ+R表示距离OM最远的簇外IoT节点。Δ表示两个UAV之间的水平距离,并且满足D>2R。接下来,在本文中均以fR(r)表示簇内节点到圆心OM距离r的概率密度函数,fr(rb)表示簇外节点到圆心OM距离rb的概率密度函数。A ∈X(OM,R)说明在簇内至少存在一个符合条件的IoT节点,因此有
2.3 基于MCDC策略的下行能量收集模型
前文提到,使用MCP策略对无人机和IoT节点进行部署,不仅会出现区域冗余覆盖,造成无人机的额外能量损耗,同时会造成簇间较强信号干扰。考虑使用MCDC策略对无人机和IoT空地网络进行建模,如图2所示,距离地面H处的无人机以恒定功率Pt为IoT节点进行能量供给,每个无人机旨在服务各自集群中的IoT节点。每个集群被划分为两类区域,分别是覆盖区域Ωc=X(o, rc)和满电区域Ωf=X(o, rf),rc即为覆盖区域半径R,rf为满电区域半径。当IoT节点处于覆盖区域Ωc,意味着UAV可以与IoT建立良好的通信链接[22],即Prc≥γc,γc表示建立所需通信信号强度的最小阈值。假设接收功率在单位时隙内信道快衰落上取平均值[23],符号Prc表示距离无人机d处的能量采集IoT节点接收功率大小,表达式为
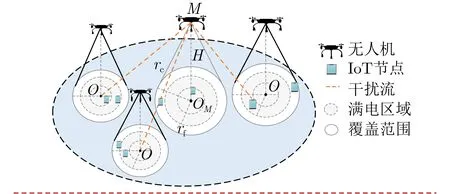
图2 MCDC策略下无人机通信网络
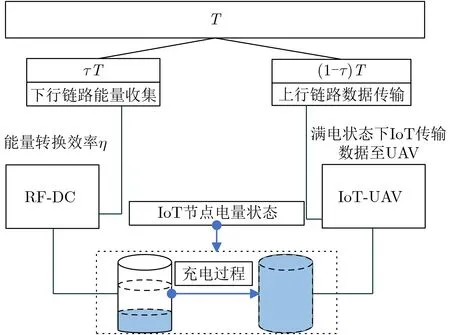
图3 IoT能量收集模型

2.4 基于MCDC策略的IoT节点传输概率模型
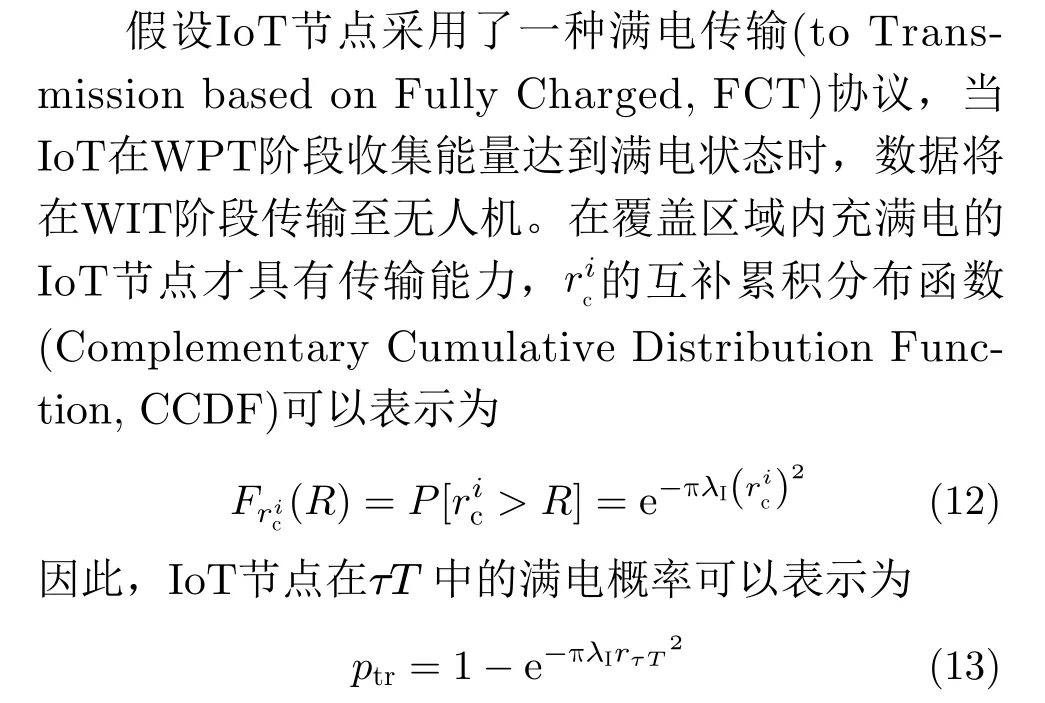
其中,rτT可由式(8)取等时得到。根据FCT协议,ptr即IoT节点达到传输条件的概率。
接下来主要基于所提MCDC策略,针对无人机空地通信网络的中断性能和吞吐量进行分析。
3 MCDC策略上行中断性能分析
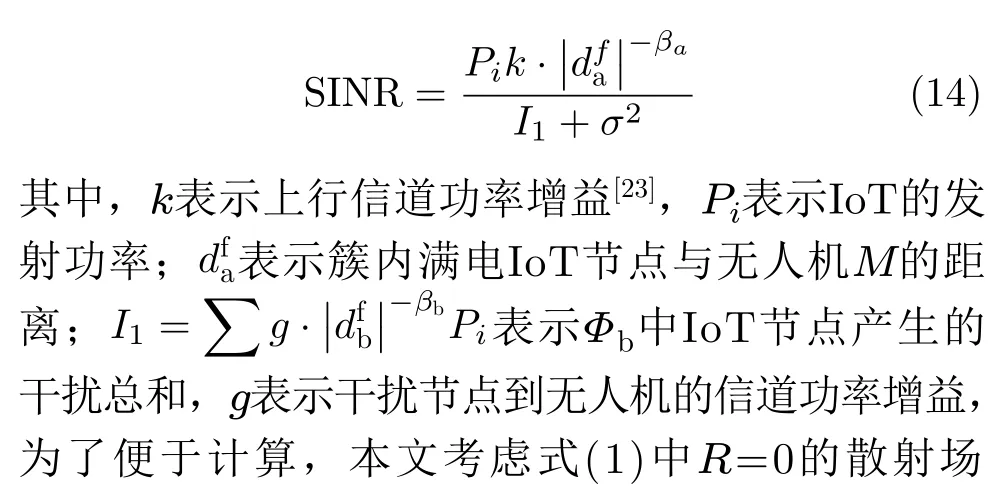
在上行WIT阶段,每个UAV旨在从各自的服务集群中收集数据,无人机节点M使用正交资源为集群中的不同IoT节点提供服务。Φa中IoT节点在上行传输过程中不存在干扰,由于Φb中具有传输能力的IoT节点将复用Φa中IoT节点的频带资源,在节点M端会引起大规模的簇间干扰,因此无人机M接收端的信干噪比表示为

4 MCDC策略上行链路吞吐量
W为每个子频带的带宽;ptr是IoT节点达到传输条件的概率,且和IoT节点收集能量区域半径有关。因此上行链路的吞吐量依赖下行链路的能量收集和时间分配比。
相比于MCP策略下的无人机和IoT节点位置建模,MCDC策略通过对簇与簇之间的距离施加约束,使得各簇的覆盖区域互不相交。使用带有距离约束的MCDC策略对无人机和IoT节点的位置进行部署,在此框架下分析了无人机辅助能量受限的低功耗物联网节点数据传输问题,并且通过调整充电时间以控制IoT节点下行能量收集与上行信息传输之间的权衡,从而最大化网络吞吐量,提升网络性能。
5 仿真分析
为了验证理论结果,对所提MCDC策略下的无人机群空地网络性能进行仿真。无人机网络通信参数在表1给出。图4是无人机恒定发射功率下IoT的传输概率和时间资源分配比τ之间的关系。图5给出了不同部署策略下无人机接收端的中断性能。图6描述了吞吐量随IoT节点密度增加的变化,最后在图7仿真了无人机的发射功率以及时间资源分配比对网络吞吐量的联合影响。
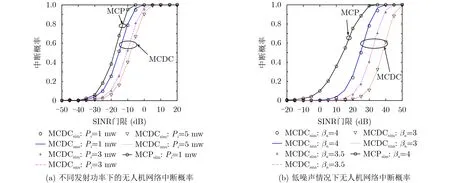
图5 不同情况下的无人机网络中断概率
表1 系统参数
图4是上行链路中IoT传输概率随时间分配比τ变化的曲线。同一发射功率下,随着τT增加,由式(10)知,Ωf区域逐渐变大,达到满电状态的IoT数量增加。同时结合式(13)可知,传输概率随着τT的增加而变大。另外,当τ位于较小值区间时,达到满电状态的IoT数量增加较快,曲线的变化较为迅速。当τ位于较大值的区间里,满电区域半径逼近于簇半径,可传输IoT数量趋于稳定,因此曲线的变化趋于平缓。同一时间分配比τ下,当无人机的发射功率变大,根据式(10)可知,X(o,rτT)范围增加,此时传输概率数值整体增加。
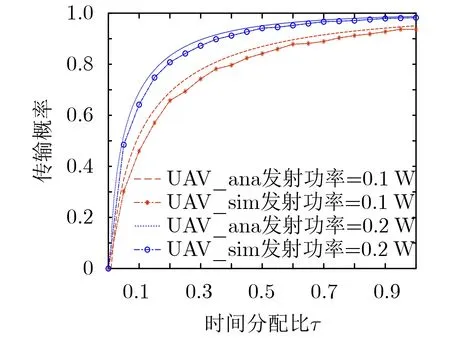
图4 传输概率与时间分配比之间的关系
图5(a)给出了固定簇内外路损指数的条件下,不同IoT传输功率对中断性能的影响。从中可以看出,首先,仿真结果与理论分析结果保持一致;其次,MCDC策略下的中断性能优于传统MCP策略。另外,在MCDC策略下增加IoT的发射功率,同一信干噪比阈值下,中断概率减小。这是因为当增加发射功率时,簇内IoT传输的有效信号作用增强。簇间IoT的干扰强度相对于簇内有用信号来说变化较小,因此中断性能有所改善。同时从图5(a)和图5(b)都可以看出,在MCP策略下的中断概率比较大。这是因为当簇与簇之间没有距离约束,簇间会有重叠的情况,干扰IoT距离无人机M较近,干扰变大。
图5(b)给出了在低噪声情况下,固定IoT发射功率,不同簇内路损指数对中断性能的影响,并与传统的MCP方案进行了对比。由图5可以看出,MCDC策略下的中断性能明显优于传统MCP策略。另外,减小簇内IoT路损指数,使得有效传输信号强度增加,因此网络中断性能变好,即中断概率变小。
图6比较了不同的IoT密度以及时间分配比对吞吐量的影响。随着τ增加,由式(10)可知,满电区域半径变大,达到满电状态的IoT数目增多,意味着可传输的IoT节点数目增加,簇外干扰IoT节点距离无人机M较远,相对于簇内的有用信号来说,来自簇外的干扰变化影响较小,因此吞吐量逐渐上升。当τ超过阈值后,满电区域的半径逐渐逼近覆盖区域的半径,同时干扰用户增多,上行传输时间减少,因此吞吐量下降。另外,从图6可以看出,增加IoT的密度,即单位面积内IoT数量增加,吞吐量整体增加。最高点吞吐量相比于较低密度的吞吐量最优值可提升123%。
图7显示了无人机的发射功率Pt和时间资源分配比τ对上行链路吞吐量的联合影响。当无人机的发射功率不断增加时,从图7可以看出,在同一时间分配比τ下,吞吐量增加。由式(10)知,增加无人机的发射功率,满电区域半径变大,达到满电状态的IoT节点数量增加,WIT阶段的IoT节点数量也随之增多。所以基于以上前提,上行链路的吞吐量增加。该结果与图6的趋势保持一致,进一步论证了理论结果的正确性。
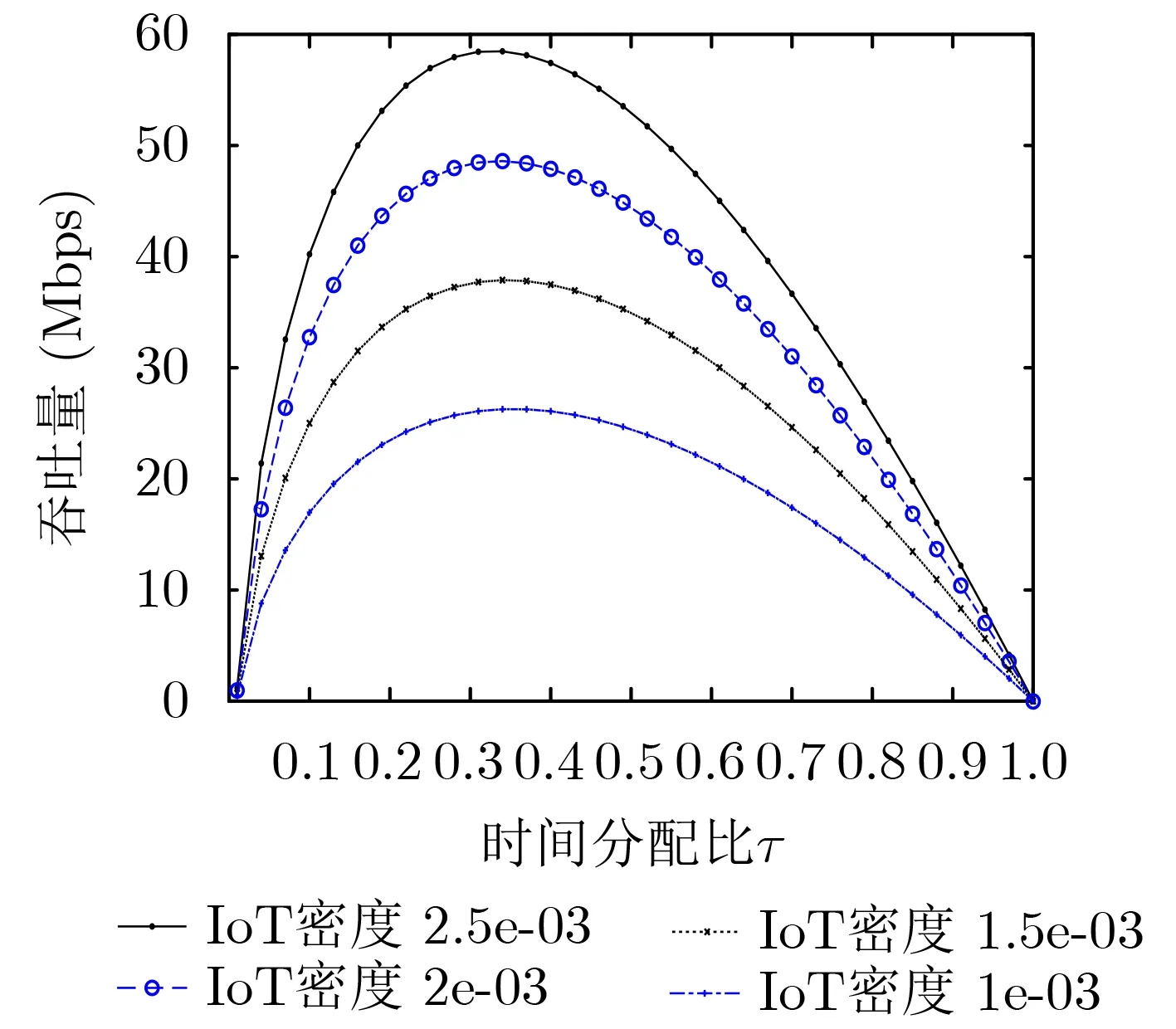
图6 吞吐量随IoT密度变化趋势
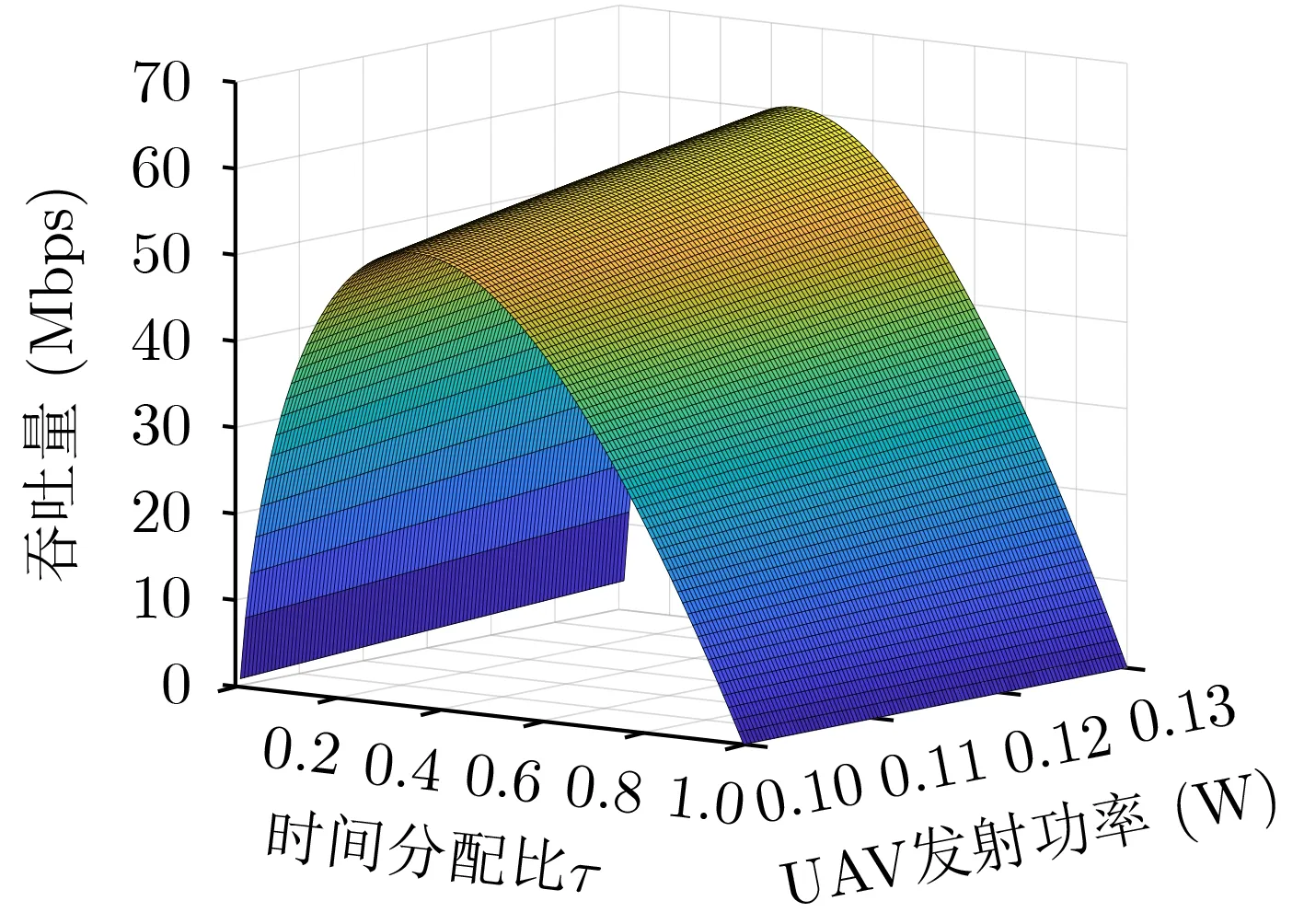
图7 UAV发射功率和时间分配比对吞吐量的联合影响
6 结论
根据大规模无人机群辅助能量受限IoT数据传输的问题,本文提出对无人机站点之间进行距离约束的MCDC策略。在该策略下,制定了满电传输协议,在下行链路WPT阶段,分析了IoT节点的传输概率。在上行链路WIT阶段,研究了簇间IoT节点上行传输对无人机接收端的干扰以用来分析网络性能指标,并对MCDC和MCP建模下的中断性能进行了比较。最后,通过数值结果和仿真分析,验证了所提MCDC策略下的网络性能优于MCP策略,并衡量了上下行链路的时间分配比,以及节点密度等参数对网络吞吐量的影响。所提方案更加贴近现实场景,对于B5G无人机群空地通信有一定的参考价值。
