共轴双旋翼动力学建模与验证
2022-03-29胡金硕黄健哲
胡金硕, 黄健哲
(1. 中国民航科学技术研究院 无人机适航审定中心,北京 100020;2. 上海交通大学 航空航天学院,上海 200240)
由于共轴双旋翼直升机上下主旋翼产生的扭矩可相互抵消,所以比传统单旋翼带尾浆的直升机结构更简单,气动对称性也更好[1].另外,对于多旋翼无人机,共轴旋翼的引入将大大提高无人机的抗风能力和稳定性[2].因此,人们对共轴双旋翼的研究和研制一直都没有停止.从俄罗斯卡莫夫设计局研发的卡-8和美国西科斯基的XH-59A验证机开始,经过半个多世纪的发展,共轴双旋翼构型的直升机越来越受到业内的关注和重视.针对共轴双旋翼飞行器的控制和飞行模拟仿真器的研发也已成为研究的热点之一.
不同于旋翼计算流体力学(CFD)的研究,针对旋翼飞行器控制设计和飞行仿真的动力学模型需要有更好的实时性,同时对计算精度也有一定的要求.1989年文献[3]开发的Peters-He模型是目前最广泛应用的旋翼有限状态模型,可以用于计算旋翼盘上任意位置的诱导速度,进而实时计算单旋翼的推力.该理论隐含了著名的动态入流理论、Pradtl/Galdstein静态入流分布和Theodorsen理论,并且计算结果和试验数据有很好的吻合度.此后,一种被称为Morillo模型[4]的动态入流模型由Peters教授团队提出,它对旋翼上方流场的求解有其优越性.由于共轴双旋翼之间流场的干扰,上下旋翼的拉力性能将下降[5],所以用于计算单旋翼诱导速度和推力的Peters-He模型和针对旋翼上方流场计算的Morillo模型,它们均无法直接用于对共轴双旋翼的动力学建模.基于当前的有限入流建模理论,文献[6]利用关联上下旋翼入流系数和压强场系数的入流影响系数矩阵来计算每个旋翼产生的诱导速度.该入流影响系数矩阵包含了旋翼自诱导速度信息和上下旋翼之间互诱导速度信息,由于当时缺少互诱导速度的封闭计算公式,所以互诱导速度需要通过数值计算得到.其开发出的模型在XV-15倾转旋翼机上得到了试验验证.由于该模型需要进行数值计算,所以其计算的实时性能还有一定的提升空间.2015年,文献[7-8]提出了混合势流模型,建立了Peters-He模型和Morillo模型非线性混合函数,对旋翼盘上和旋翼上方流场的计算精度做了进一步提升,更重要的是,该模型对旋翼尾迹进行了建模,给出了旋翼尾迹流场计算的封闭形式解.文献[9]在旋翼悬停地效建模上应用了该混合势流模型,并与试验数据和RotCFD计算结果进行了对比,验证了模型有效性.文献[10]基于运动嵌套网格方法,建立了一套适合于悬停状态下共轴刚性双旋翼非定常干扰流场分析的计算流体力学方法.该研究运用了计算流体力学方法,可以给出共轴双旋翼更加细致的动态流场信息,提高了计算精度,但是存在很大的计算复杂度.文献[11]对倾转过渡状态共轴倾转旋翼进行了研究,考虑了尾流倾斜和收缩的上下旋翼的相互干扰,通过能量方程推导了诱导速度的计算公式,最后利用迭代方法求解了上下旋翼的载荷.由于整个计算过程需要迭代,所以通过此方法进行共轴多旋翼动力学建模也具有一定的计算复杂度.文献[12]结合叶素理论和Pitt-Peters 动态入流模型对共轴双旋翼的气动干涉和挥舞运动进行了近似建模,其他未准确建模的部分用控制算法进行补偿,并在Simulink搭建了控制器进行联合仿真.该方法利用动态入流模型计算诱导速度,仿真实时性好.但是Pitt-Peters 模型结构简单,是Peters教授团队最初提出的三状态动态入流模型[13],对于一些复杂的飞行状态难以保证较好的计算效果.此外,若仅采用诱导速度干扰系数表示上、下旋翼之间的气动干涉,需要较为充分的理论支撑.现有研究中主要考虑了上下旋翼的流场干扰,并对其进行了相应的数学建模,但还未见到有基于时滞伴随理论的势流模型来建立共轴双旋翼动力学模型的研究.
针对共轴双旋翼上旋翼入流受到下旋翼上游流场影响,以及下旋翼入流受到上旋翼尾流影响的问题,本文提出一种基于势流模型的共轴双旋翼动力学建模方法,并设计了共轴双旋翼的推力测试装置,验证了悬停状态下共轴双旋翼的推力计算准确性.本文研究可为共轴双旋翼飞行器的旋翼初步设计、控制和飞行仿真提供理论基础.
1 共轴双旋翼有限状态模型
根据文献[4],上下旋翼在其各自平面和上方位置(ν≥0)产生的诱导速度v(u)(ν,η,ψ,t)和v(l)(ν,η,ψ,t)分别表示为
v(u)(ν,η,ψ,t)=
(1)
v(l)(ν,η,ψ,t)=
(2)

(3)
式中:x,y,z为计算点在体坐标系中的正则化坐标位置,则在旋翼边缘有A=1.
由于上旋翼的尾迹会对下旋翼产生影响,所以需要给出上旋翼的尾迹速度的计算公式.根据文献[8],上旋翼在(ν,η,ψ)位置的尾迹速度v(u)(ν,η,ψ,t)(v<0)表示为
v(u)(ν,η,ψ,t)=v(u)(0,η0,ψ0,t-τ)-
ϖ(u)(0,η0,ψ0+π,t-τ)
(4)
式中:v(u)(0,η0,ψ0,t-τ)为上旋翼在(0,η0,ψ0)位置的诱导速度;ϖ(u)(0,η0,ψ0+π,t-τ)为上旋翼在(0,η0,ψ0+π)位置的伴随速度;τ为时滞量.由于椭圆坐标系与体坐标系的转换比较复杂,η0、ψ0与η、ψ之间的关系可用如下关系式进行表述:


ϖ(u)(ν,η,ψ,t)=
(5)


(6)
(7)

(8)

通过低速流体的质量守恒和动量守恒定律公式,代入用勒让德函数表示的速度和压强表达式[7],并通过伽辽金变换可得到一组以诱导速度因子和伴随速度因子为状态量的常微分方程:
(9)
(10)
其中

(11)
其中

由于式(9)中的入流矩阵需要τ时刻前的伴随速度因子信息,所以需要同时对式(9)进行时间正向数值积分,并对式(10)采取计算时刻t1为初始的时间反向数值积分,同时求得速度因子和伴随速度因子的时间序列信息.对于式(10)的时间反向数值积分,需要在每一个计算时刻进行时长为τ的反向数值迭代,计算量比较大.通过以下计算步骤可以通过更少的计算量,求得在t1时刻伴随速度因子τ时刻前的数值Δ(u)(t1-τ).
步骤1求解R-1M-1K(u)的特征值和特征向量分别为λi(i=1, 2, …,G),φ,使得:
其中:G为矩阵M的维数.

步骤3通过下式计算Δ(u)(t1-τ):
Δ(u)(t1-τ)=
(12)
(13)
(14)

(15)
2 计算结果验证
为了验证共轴双旋翼诱导速度动力学模型的正确性,选取悬停状态上、下旋翼的推力作为研究对象,搭建试验验证平台,平台实物图如图1所示.右侧旋翼为固定安装,旋翼轴高度和轴向位置不可调.左侧旋翼可沿轨道向前向后移动,用于调整双旋翼的轴向距离;左侧旋翼的离地高度也可进行调整,当高度调整至右侧旋翼高度相同时,为共轴状态.选取型号为1024的PVC螺旋桨作为测试桨叶,该桨叶直径约为254 mm,距桨叶中心点5 mm半径范围内为平直安装面(矩形翼型、无扭转角).桨叶桨距为119.38 mm,弦长沿桨叶径向位置连续可变,为了简化计算,将桨叶从平直安装面结束段开始,沿径向方向分为5部份,分别测量每一部分边缘位置的弦长,数据如表1所示.沿桨叶径向方向距离桨叶中心为r的截面,其扭角可根据下式计算:
表1 测试旋翼叶片径向弦长分布
图1 共轴双旋翼推力测试台架Fig.1 Thrust test rig for coaxial lifting rotors
θ(r)=ϑr
(16)
式中:ϑ为桨叶桨距.两侧旋翼分别由两套完全独立的动力系统提供旋转动力,两套动力系统的电机也由完全独立的控制系统来分别调节脉冲宽度调制(PWM)值,进而实现电机转速的独立控制.

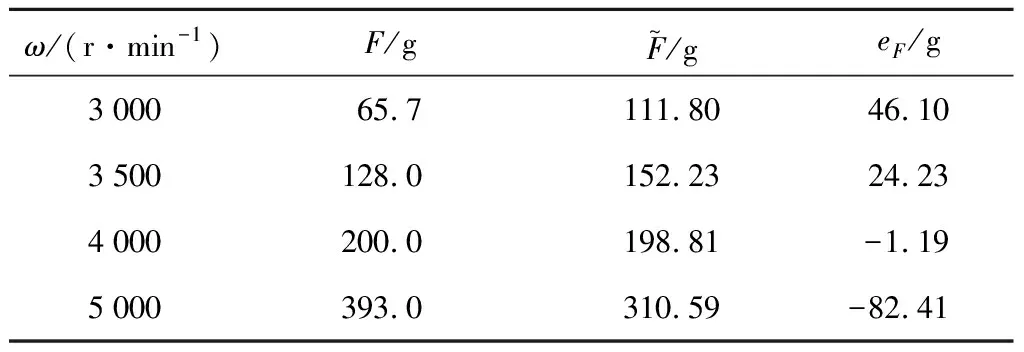
表2 单旋翼不同转速下的推力Tab.2 Thrusts at different rotor speeds for single rotor

图2 单轴旋翼测试结果Fig.2 Test results for single rotor
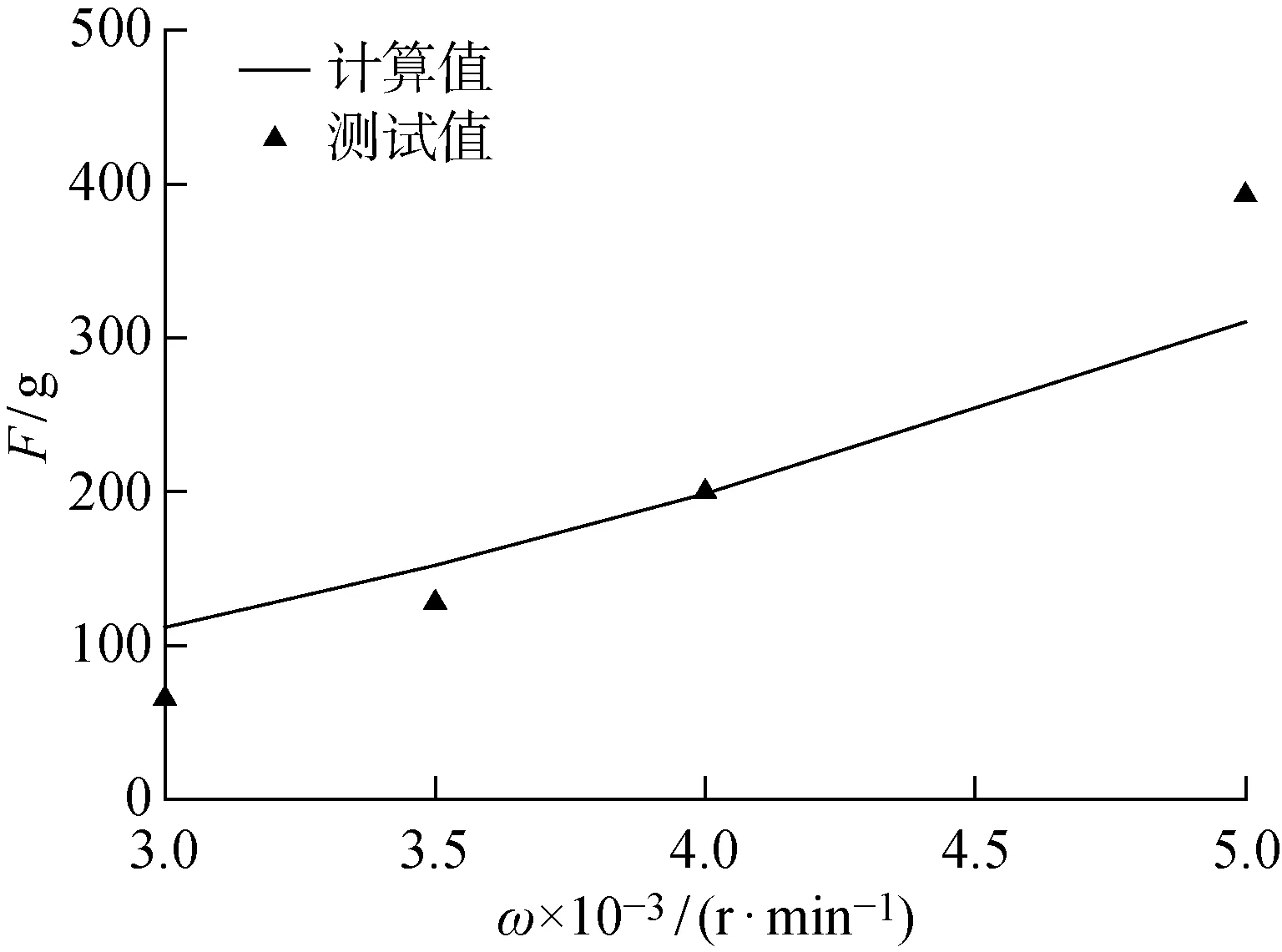
图3 单轴旋翼推力计算结果Fig.3 Computational thrust results of single rotor
采用MATLAB中的Curve Fitting Tool工具包,对数据进行拟合,可得到转速与推力的特性关系式,如下式所示:
(17)
对于测试数据,拟合的误差平方和(SSE)为 0.752 6,而对于计算数据,拟合的误差平方和为1.908×10-7.由式(16)可知,推力系数的计算值和测试值仅有9%的偏差.

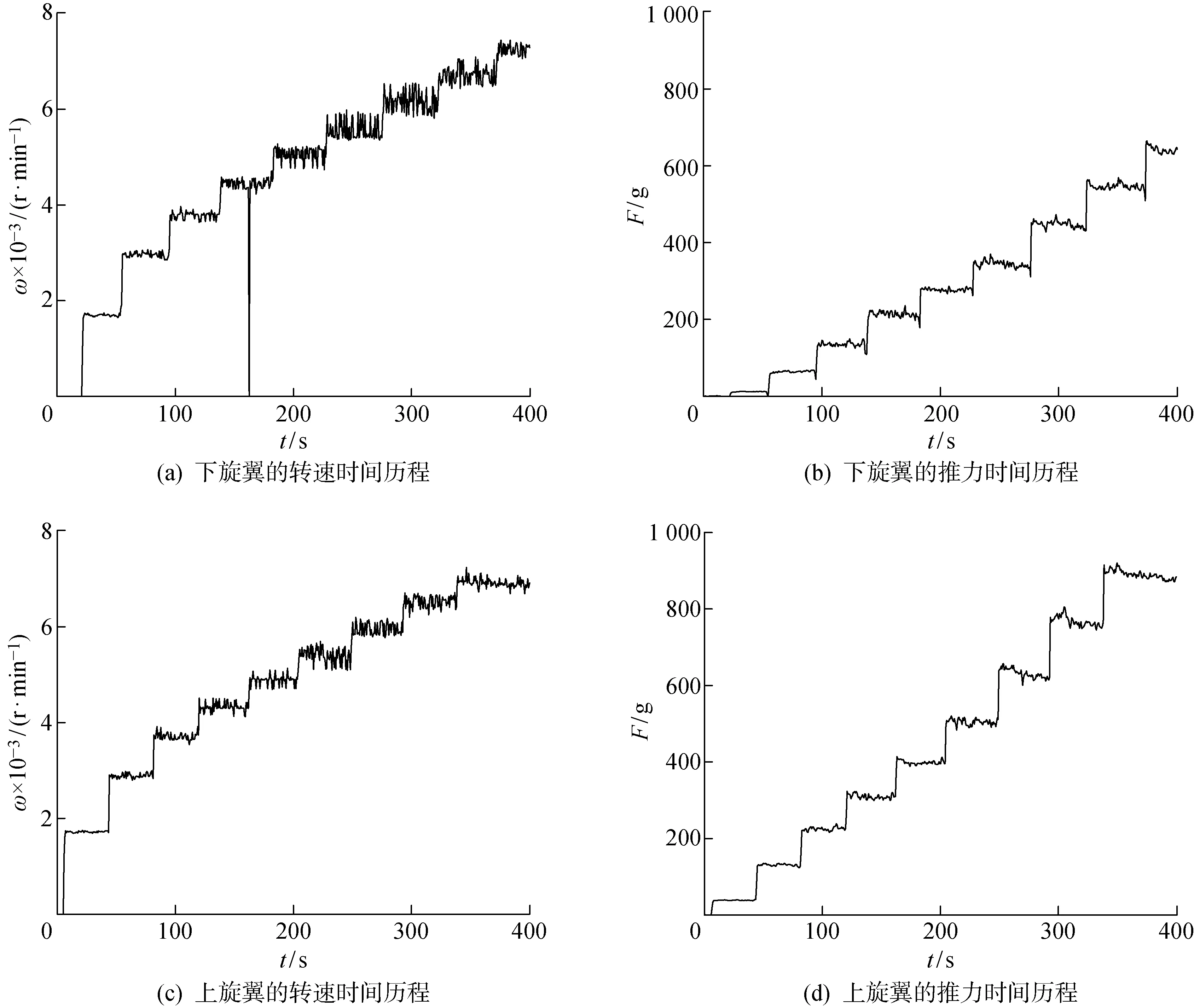
图4 双轴旋翼测试结果Fig.4 Test results for coaxial rotors
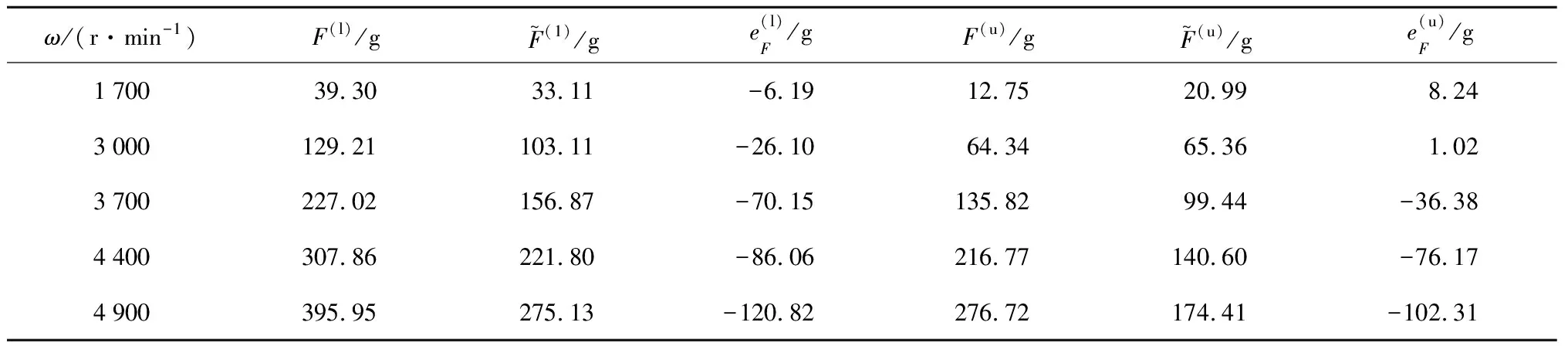
表3 双旋翼不同转速下的推力Tab.3 Thrusts at different rotor speeds for coaxial lifting rotor
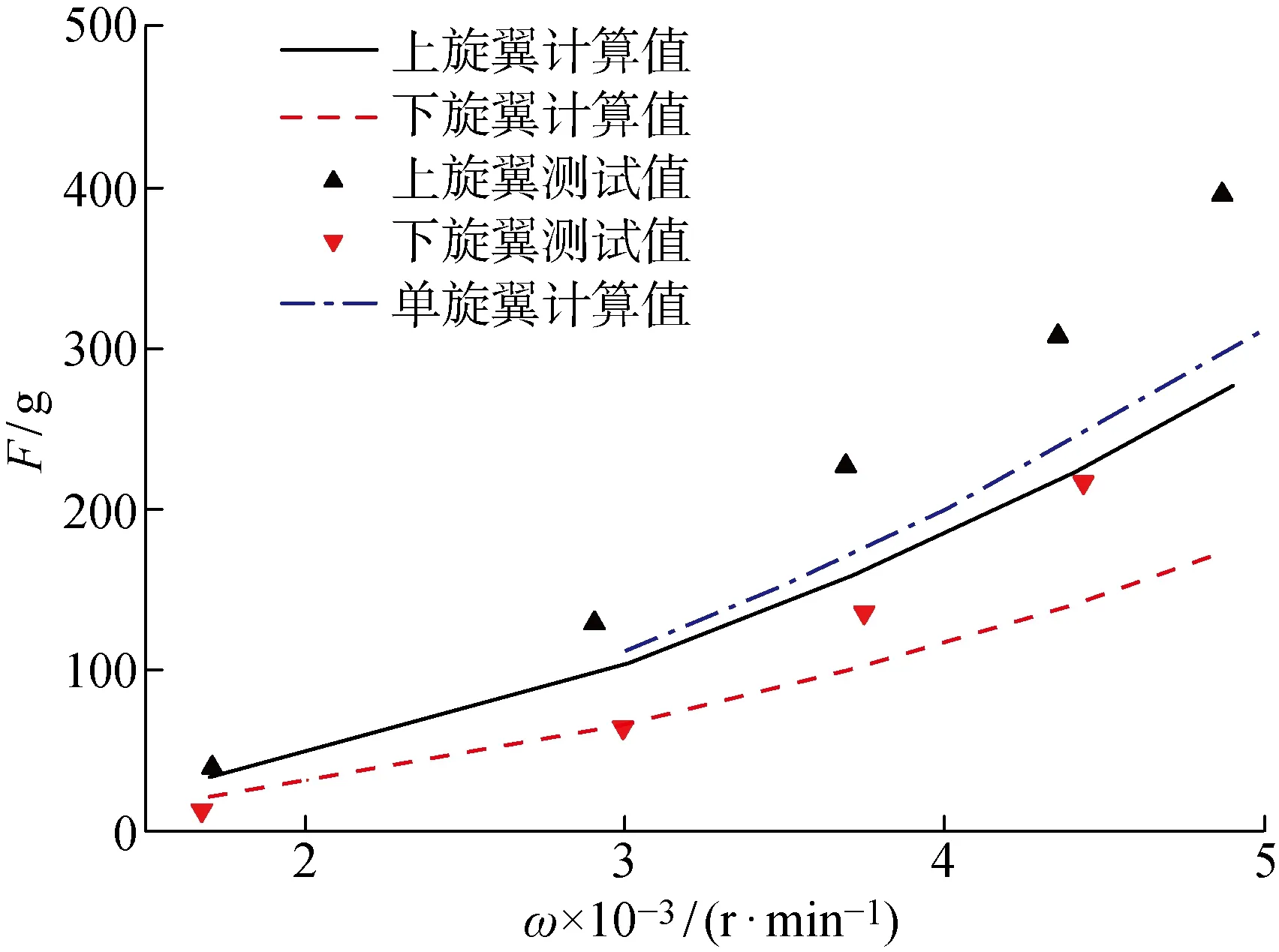
图5 共轴双旋翼推力计算结果(轴距127 mm)Fig.5 Computational thrusts results of coaxial lifting rotor (axial distance=127 mm)
由图5可知,在 3 000~5 000 r/min转速范围内,相较于单轴旋翼,对于共轴双旋翼左、右旋翼在相同转速下均出现推力损失,并且由于左旋翼位于右旋翼尾迹之中,造成的推力损失更大.所提出的模型可以较好的反应出这种规律,并且趋势与测试值大致相同.和单轴旋翼类似,随着转速的提高,推力测试值越高于计算值.同样地,通过数据拟合,可以分别得到左、右旋翼的转速与推力特性关系式,如下式所示:
(18)
(19)
对于测试数据,右旋翼拟合的SSE为 0.021 75, 左旋翼拟合的SSE为 0.152 2.对于计算数据,右旋翼拟合的SSE为1.354×10-7,左旋翼拟合的SSE为6.538×10-8.
3 结语
本文研究了基于有限状态模型的共轴双旋翼动力学建模方法,利用伴随理论推导了上旋翼尾迹诱导速度表达式,拓展了传统的单轴旋翼有限状态模型.上旋翼动力学模型中的入流矩阵包含了上旋翼的平均自诱导速度信息和下旋翼的平均互诱导速度信息,下旋翼动力学模型中的入流矩阵包含了下旋翼的平均自诱导速度信息和上旋翼的平均互诱导速度信息,其中上旋翼的平均互诱导速度需要利用上旋翼尾迹诱导速度计算式来求取.动力学模型的载荷输入表达式也包含了诱导速度信息,由此可见,该动力学模型是入流和载荷、上旋翼和下旋翼耦合的强非线性动力学模型.跟一般的经验模型不同,此模型需要输入共轴双旋翼桨叶几何信息、气动参数、轴向间距、转速等实际物理信息,因此更具有普适性,能够适应更多的应用环境.通过试验数据验证,此模型具有一定的计算准确度,可用于共轴双旋翼的设计初步计算、控制器设计与实时仿真,有一定的工程应用价值.
