面向旋翼飞行器的仿生机械臂终端滑模控制
2022-03-29王尧尧刘卢芳鞠锋陈柏吴洪涛
王尧尧,刘卢芳,鞠锋,陈柏,吴洪涛
(1.南京航空航天大学机电学院,江苏南京,210016;2.浙江大学流体动力与机电系统国家重点实验室,浙江杭州,310027)
近年来,无人飞行器相关的研究领域取得了飞快的发展,四旋翼飞行器已广泛应用于科考勘探、军事侦察、摄影娱乐、巡检植保等领域。这些应用场景并不要求飞行器与物体进行接触,没有主动作业的需求。而在某些场景下,无人机必须从被动作业(如检查、监视、遥感等)转变到主动作业(如抓取和操纵)。相关研究在过去的十几年中取得了很大的进展[1]。传统飞行机器人所搭载的均为刚性机械臂,其质量较大,转动惯量更高,在驱动时能耗过高。对于飞行器这一类能耗敏感的载体来说,刚性机械臂还不够理想。ZHAO 等[2]设计了应用于飞行机器人平台的新型绳驱动机械臂,用柔性的绳索传动,将驱动电机置于机械臂底座,臂身的转动惯量较小,驱动所需能耗较小,在降低能耗、延长工作时间方面取得了一定效果,但也使得系统控制更为复杂。
绳驱动技术的引入使得飞行机械臂系统具有复杂的动力学特性,因此不基于模型的控制器更具实用性。利用时延估计(time-delay estimation,TDE)与滑模控制(sliding mode control,SMC)可实现这一目标。TDE 是一种利用系统前一时刻变量估计系统现在时刻状态量的控制方法,已被广泛应用于信号的无偏滤波[3]、参数和状态估计[4]以及非线性系统的控制等许多研究领域[5]。LEE 等[6]针对工业机器人机械臂,提出了一种基于自适应积分滑模控制和TDE 的自适应鲁棒控制器。通过TDE 估计系统未知参数,积分滑模降低系统状态在滑动面附近的波动。CAO等[7]面对任务空间中可变载荷下的连续轨迹跟踪控制问题,提出了一种基于TDE的连续非奇异终端滑模控制器。BAE等[8]提出了一种基于TDE 和模糊逻辑系统(fuzzy logic system,FLS)的机器人跟踪控制控制器,并且利用FLS来减小TDE引起的跟踪误差。滑模控制[9]是绳驱动系统中另一种广泛使用的控制策略,与适当的趋近律相结合时表现出更好的性能。WAI等[10]提出了一种线性滑模控制与模糊控制相结合的方法来控制感应电动机的指令轨迹,并通过自适应律对控制器参数进行了调整,然而,线性滑模控制只能保证在滑动阶段渐近收敛到平衡点。SPURGEON[11]在线性滑动模式中引入分数次幂,提出终端滑模(terminal sliding mode,TSM)。然而,采用分数次幂可能会在相平面的某些点产生无穷的控制力,这就是终端滑模的奇异性问题。为解决奇异性问题,FENG等[12]提出了一种用于刚性机械手控制的非奇异终端滑模(nonsingular terminal sliding mode,NTSM),以消除奇异性。WANG 等[13]提出一种改进的快速NTSM 被用于水下航行器机械手的关节空间跟踪控制。最近,研究人员将SMC 与其他理论如分数阶理论[14-16]、粒子群优化[17]、遗传算法[18]、神经网络[19-20]和超扭曲理论[21-22]相结合,研究了许多比单纯使用SMC 更好的控制策略。FLS 与传统SMC 结合后,相比于前述其他方法,对于解决滑模控制抖振的问题具有较大优势。文献[23]为了开发无抖动的滑模控制器,采用基于TS 模糊控制系统的边界层技术消除滑模控制的抖动得到了较好效果。文献[24]将FLS与SMC 结合,利用FLS 作为SMC 的切换控制部分,可在未知干扰下的抑制抖振现象。
为进一步提高飞行机械臂的交互安全性、降低驱动所需能耗,本文作者提出仿生飞行机械臂的概念并设计制作一型面向旋翼飞行器的仿生机械臂。该系统用仿生机械臂替代传统的机械臂及绳驱动机械臂作为作业装置,利用绳索实现高效柔性传动,拥有更高的柔性及交互安全性,进一步降低作业能耗,保证飞行机械臂作业的长续航和柔顺化。同时,绳驱动系统的动力学模型更加复杂,由于外部扰动,精确的动力学参数几乎不可获得。以上问题使得仿生机械臂的高精度控制较为困难。因此,本文还提出了基于NTSM、TDE、AFLS的新型控制器,引入TDE部分来估计系统的集总未建模动态,而NTSM 保证对误差的抑制和系统的鲁棒性。在NTSM 中,引入自适应模糊系统(adaptive fuzzy logic system,AFLS)调整增益。由于采用了TDE,该控制器不需要精确的动态模型和参数。当系统受到干扰并产生较大误差时,引入模糊增益调整增大使得其误差快速收敛。当系统状态趋于稳定时,在没有外界干扰的情况下,增益减小,所需的控制能量也相应减少。因此,该控制器结构简单,便于实际应用。最后,通过仿生机械臂实验平台验证了所提控制器的综合性能。
1 结构设计
本文所设计面向旋翼飞行器仿生机械臂如图1所示。仿生机械臂搭载于四旋翼飞行器上,是仿生飞行机械臂系统的作业单元。仿生机械臂灵感来源于章鱼,驱动绳索的伸长与缩短模拟章鱼触手肌肉的舒张与收缩,以此控制臂身的偏转。

图1 仿生飞行机械臂结构图Fig.1 Structure diagram of bionic aerial manipulator
机械臂部分采用弹性的柔性支柱作为支撑结构,具有保持机械臂整体形状和提供弯曲运动刚度的作用。机械臂每个关节段包含有10 个尼龙制的支撑圆盘,支撑圆盘等间距布置在柔性支柱上。在支撑圆盘直径为30 mm的分度圆上开有4个沿圆周方向均布的直径为1.2 mm 的通孔,控制每个关节段运动的驱动线从通孔中穿过,驱动线为直径0.75 mm 的钢丝。由于飞行器十分灵活,自由度高,因此机械臂无需过多的自由度,文中设计的机械臂每个关节段有1个自由度,采用双线驱动的方式,2条驱动线沿圆周方向间隔180°布置。每个关节段仅需1个驱动电机。第一个关节段运动的驱动线起始端与伺服电机相连,然后依次穿过第一个关节段的支撑圆盘,与该关节段的末端支撑圆盘固连。同理,控制第二、三关节段运动的驱动线起始端连接到伺服电机上,末端分别与第二、三关节段的末端支撑圆盘固连。
本文所设计的仿生机械臂每两个小单元间采用球型关节连接。当驱动绳索收缩后,机械臂会向绳索缩短的方向弯曲。
若要完成对所设计仿生机械臂的反馈控制,需要得到臂身偏转角度的实时反馈信息,但现有的臂身形状检测方式如视觉反馈、磁传感器反馈、光纤布拉格光栅(FBG)传感器反馈等都不适合于本文所提场景。故本文建立驱动电机转角与臂身偏转角之间的映射关系,通过控制电机转角,间接完成对于臂身偏转角度的控制。
为了便于分析,基于连续题机械臂研究中常用的分段常曲率假设[25],提出了以下假设条件:
1)仿生机械臂在弯曲运动过程中,假定机械臂关节段中各个小单元间的弯曲角度相等;
2)仿生机械臂在弯曲运动过程中,假定机械臂关节段的弯曲曲线为曲率相等的光滑连续曲线;
3) 绳驱动连续型机械臂在弯曲运动过程中,假定驱动绳不存在弹性伸长与收缩。
基于以上假设,本文所设计的仿生机械臂在运动时,相同关节段臂身各个小单元间的驱动绳长变化都是相同的,因此只需分析每两个小单元间的绳长变化与偏转角度即可得到所求关系。将2个单元间的几个关系抽象后,便可以得到绳长变化示意图(如图2所示),其中,d为驱动绳直径;为偏转角度;h0为原始绳长;hl为伸长后的绳长;hs为缩短后绳长。由几何关系可得到如下关系式:


图2 球铰型关节的绳长变化Fig.2 String length change of spherical joint

结合绳长在电机驱动端的变化,设电机的旋转角度为θ,电机端绕绳输出轮半径为r,则有

其中:N为臂身小单元数量;Δl为驱动绳长变化量。
驱动电机旋转角度θ与关节弯曲角度q之间的关系可以表示为

2 非奇异终端滑模控制器设计
2.1 控制器设计
一个多自由度的机械臂模型可由下式来描述[26]:
其中:q(t)和θ(t)分别为机械臂关节与电机轴的转角;Im和Dm分别为驱动电机的转动惯量与阻尼;τm和τ1分别为电机的驱动力矩和作用于关节的作用力矩;J1和Dj分别为关节的刚度与阻尼;M(q),分别为机械臂的质量矩阵、离心力和科里奥利力项,重力和摩擦力矢量;τd(t)为未知的外部干扰力矩项。
为得到电机直接驱动机械臂的动力学模型,将式(5)代入式(7)得到:

整合未知项和扰动项,引入常数对角矩阵,则式(8)可以改写为:
ω中包含了机械臂系统中各种未知动力学参数以及未知外界干扰,形式复杂,很难获取其精确值,为此,采用时延估计技术得到其近似值如下:

假设机械臂关节的期望轨迹二阶连续可导并且有界,定义为qd,定义控制误差及其一阶导数与二阶导数分别为e=qd-q,选择的滑模面[23]为

式中:s∈Rn;α=diag([α1,α2,…,αn]);1<βn<2。且选择的趋近律为

其中:ρ1=diag(ρ11,ρ12,…,ρ1n),ρ2=diag(ρ21,ρ22,…,ρ2n),ρ1i>0,ρ2i>0,γ=diag([γ1,γ2,…,γn]),0<γi<1。由式(9)、(11)、(12)和(13)可得终端滑模控制律为


其中:L为时延估计时间。
由式(9)可得到如下形式的简单二阶系统

其中:ω-可视为力矩干扰。
再结合式(11)和(14),则闭环控制系统误差动态为


时延估计误差有界的前提条件[27]是矩阵I-M-1的每一个特征值的绝对值都必须小于1,即

其中:λi为矩阵的第i个特征值。
2.2 稳定性证明
选取第i个关节的相关参数及变量进行推导证明前述控制器的稳定性。首先,证明2个引理。
引理1假设α1,α2,…,αn均为正值,并且0<p<2,则不等式(20)成立

引理2若李雅普诺夫函数V(x)满足下列条件:

其中:0<γ<1,则V(x)将在有限时间T内从V(0)收敛到V(x0)

选择李雅普诺夫函数为V=sisi/2,将其对时间进行微分,并将式(12)、(17)和(18)代入其中,可得到如下形式的微分表达式

式(23)可改写为如下的2种形式:

由于1<γi+1<2,根据引理1,可知V满足如下不等式:

根据引理2,若和均为正数,则V将会在有限时间T'内收敛到0,其中因此,当控制误差导数时,系统状态轨迹能够收敛到使和为负数,即收敛到如下的区域内:

由式(25)可以得到:
因此,存在时延估计误差ε时,系统相轨迹能够保证收敛到式(12)表示滑模面的邻域内,即

其中:

由式(23)可知:当0 时,李雅普诺夫函数的导数也等于0,该函数的收敛可能停止。根据式(17)可以得到误差的二阶导数为

将式(32)改写为如下2种形式:

接下来推导误差及其导数的收敛域。以关节i为例,设其滑模函数为si,则si≤Δ。滑模面为

系统状态到达另一个滑模面上时,


根据滑模面可计算误差ei的收敛域为

该控制器稳定性证明完毕。
2.3 引入模糊增益调整

其中:τfuzzy为引入的模糊增益调整力矩,τfuzzy=ξiΨ(s)i,ξi∈R,表示模糊系统的自适应参数;Ψ(s)为滑模信号s的模糊输出,用NB,NM,NS,ZO,PS,PM,PB表示模糊系统的7个模糊集,分别表示负大,负中,负小,零,正小,正中,正大,模糊规则如表1所示。

表1 模糊规则表Table 1 Fuzzy rules title
取自适应率为

引入模糊增益调整后,再结合式(11)和(14),闭环控制系统误差动态可以表示为

定义李雅普诺夫函数为Vi=0.5sisi+0.5ξiξi,将其对t进行微分,并将式(12)和(40)代入其中,可得到:

式(42)可改写为如下的2种形式:

将式(43)简写为


故引入模糊增益调整后,所提控制器依旧稳定。
控制器结构如图3所示。

图3 控制器结构图Fig.3 Structure diagram of proposed controller
3 实验验证
利用新设计的仿生机械臂进行实验验证提出的控制器的有效性。实验在2种工况中进行。工况1,机械臂以3 种不同的速度跟踪关节空间中的正弦信号;工况2,在机械臂末端安装一个50g的有效载荷,以证明控制器对参数不确定性的鲁棒性。用一个没有AFLS 的NTSM 控制器进行了对比实验。
实验环境如图4 所示。在上位机中基于Simulink-Realtime环境编写控制程序,程序下穿至下位机后,下位机根据数据采集卡接收到的反馈信号计算所需的驱动信号,再通过数据采集卡传送至电机驱动器中,控制电机转动,实现闭环控制。

图4 实验平台Fig.4 experimental platform
关节2 与关节3 的运动期望轨迹是正弦曲线,幅值分别为60°与45°。工况1 下3 组实验的周期T设定为30,20和12 s。
工况1实验结果如图5~7所示。随着周期的减小,控制误差尤其是初始阶段的峰值误差趋于增大,这是算法在相同控制参数下的正常控制现象。对比NTSM 与所提NTSM-AFLS 控制器可以发现,在3 种周期下,NTSM-AFLS 控制器的在初始阶段的控制效果都明显比NTSM的好,误差收敛更快,峰值误差更小。

图5 工况1下周期30 s时实验结果Fig.5 Experimental results under condition 1 and T=30 s
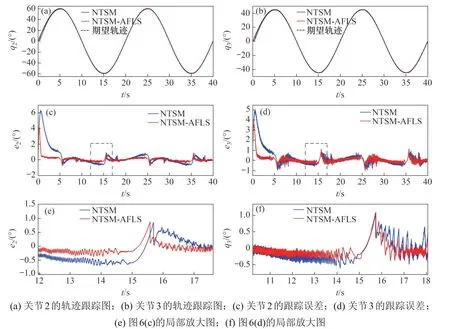
图6 工况1下周期20 s时实验结果Fig.6 Experimental results under condition 1 and T=20 s

图7 工况1下周期12 s时实验结果Fig.7 Experimental results under condition 1 and T=12 s
表2 所示为跟踪误差的均方根(RMS)和最大值。由表2 可知:相较于对比控制器NTSM,在3种周期下,关节2的NTSM-AFLS控制器峰值误差分别减少了27.3%,29.3%和46.9%,均方根分别减小了55.5%,64.6%和67.8%,这表明所提控制器不论是在初始阶段还是全局都更有优势。注意到,控制误差波形中会出现多个峰值,这是机械臂的运动方向发生改变时,由于电机减速器的齿轮间存在间隙而产生的跟踪误差。观察局部放大图(图5(e),5(f),6(e),6(f),7(e)和7(f))可知,NTSM-AFLS控制器与NTSM控制器相比,换向导致的误差峰值基本相同,但换向前后的误差更加接近零误差线,跟踪效果要明显比NTSM 控制器的好。

表2 关节2在工况1下的跟踪误差均方根和最大值Table 2 RMS and max tracking error of joint 2 under condition 1
在工况2下,为了证明控制器对参数不确定性和外部干扰具有良好的鲁棒性,机械臂末端安装了一个50g的有效载荷,并选择期望轨迹的周期T=20 s 进行实验。关节2 和3 在工况2 下的跟踪误差均方根和最大值如表3所示。

表3 关节2和3在工况2下的跟踪误差均方根和最大值Table 3 RMS and max tracking error of joint 2 and joint 3 under condition 2
图8 所示为有无有效载荷的控制器的性能比较。从图8可以看出:无论有无有效载荷,跟踪误差几乎相同,对比实验表明,该控制器对参数不确定性具有良好的鲁棒性。

图8 工况2有无有效载荷的NTSM-AFLS控制器的性能比较Fig.8 Performance comparison of NTSM-AFLS controller with or without load under condition 2
总之,在工况1下,所设计仿生机械臂以3种不同的速度对正弦轨迹进行跟踪,与NTSM 控制器相比,所设计仿生机械臂控制效果更优。在工况2 下,分别以有无负载进行实验,验证了NTSM-AFLS控制器对参数不确定性的鲁棒性。以上实验验证了所提控制算法的有效性。
4 结论
1)提出了一种基于TDE技术的NTSM控制器,用于新设计面向旋翼飞行器的仿生机械臂的鲁棒控制,由于引入了TDE 技术,新的控制器是无模型的,不需要精确的模型参数,易于实际应用。
2) 相较于传统的终端滑模控制器,NTSMAFLS控制器具有更高的收敛速度,能在系统初始阶段就使得误差快速收敛;初始阶段误差峰值减小了近30%,同时,稳定阶段误差峰值保持不超过1°,得到了更优的控制效果。
