大型医疗设备中用于立体定位的一种摆动部件的创新设计应用研究
2022-03-29褚国荣







摘要:提出了一种将放射治疗和诊断治疗相结合的医疗设备创新机构设计方法,通过丝杠结构与导轨结构呈一定角度布置,实现摆动机构沿圆弧运动。采用解析法对溜板机构进行运动学分析,保证溜板沿圆弧运动的匀速性和连贯性,同时保证与诊断机构的定位精度;建立摆动机构模型并对其进行静力学分析和模态分析,得到摆动机构的变形分布情况和各阶固有频率及振型。结果表明,摆动机构具有较高的速度连贯性和足够的强度来支撑放射治疗和诊断治疗相结合的医疗设备的运行,结构设计合理,满足设计要求。
关键词:大型医疗设备;摆动机构;模态分析;变形;振型
中图分类号:R197.39 文献标志码:A 文章编号:1671-0797(2022)05-0022-04
DOI:10.19514/j.cnki.cn32-1628/tm.2022.05.006
引言
随着人类社会的创新发展,社会生产水平的提高,人们对健康的需求越来越高,而在各类疾病中,肿瘤治疗是一个世界性难题。当前人们常采用放射治疗的方法进行肿瘤治疗。但CT诊断的病灶位置与放射治疗的目标靶点很难做到一致,即CT诊断出肿瘤后病人进行放射治疗时,其位置将发生转移,影响放射治疗效果。国际上的大型医疗设备公司,如美国GE、德国西门子、荷兰飞利浦等,都是将诊断设备和治疗设备分开。为改变这一现状,将16排CT图像引导与6MeV放射治疗系统结合在一起,设计了能够实现精确定位的摆动机构,能将CT诊断出来的病灶位置反馈给放射治疗设备,避免了病人改变位置后诊断出来的病灶无法准确定位的情况,从而解决了病灶位置和目标靶点无法一致的难题。
本文针对CT图像引导立体定位6MeV放射治疗设备研发,根据放疗设备的结构特点,创新设计了一种用于该设备中定位和治疗的溜板机构和弧形背板,根据放疗设备的空间位置及运动范围,根据摆动原理使放射机构以弧形方式在导轨上运行,从而配合诊断机构实现精准定位。
1 放射源摆动机构设计原理
1.1 空间运动
根据前述设计要求,设计出来的CT影像引导X射线全身放射外科治疗系统的结构如图1所示。其中,创新设计的摆动式导轨输送放射源溜板机构如图2所示,主要由弧轨背板、溜板驱动板、凸轮机构、放射源等装置组成,具有输送和放射诊断功能。溜板驱动板在弧轨背板的导轨上进行往复运动,其上的丝杠在溜板驱动板的驱动下带动放射源与诊断机构配合。其运动关系简图如图3所示。设溜板驱动板原点位于整体机构最左端,其运动轨迹为A1O1B1;当丝杠围绕O1点摆动至与导轨角度为θ时,溜板驱动板运动轨迹变为A2O2B2,其中A1A2段为一段圆弧线。溜板机构上的丝杠处于同步带轮张紧力和电机驱动力共同作用下,摆动插头紧贴弧形导轨底侧弯曲运行,由于摆动机构具有限位条件,则放射源在以圆弧线运行时可根据轨迹变化量的最大摆角来确定最大补偿值[1]。
根据丝杠与溜板机构的几何关系,当丝杠摆动到最大角度θ时,溜板机构上放射源机构运行轨迹长度与处于弧形背板中心处轨迹变化量相等[2]:
式中:R1为弧形背板圆弧导轨内侧半径;b为弧形背板导轨内侧宽度。
1.2 放射源摆动机构运动学分析
在应用过程中,溜板机构要保持匀速圆周运动,就需要导轨移动的速度能根据溜板的位置及时调整,如何保持其运动关系是需要重点研究的内容。利用溜板机构在轨道上的摆动带动放射机构运行,其摆动角度范围为±25°。电机为溜板机构提供动力,带轮带动丝杠沿弧形背板运行,摆动插头将丝杠和溜板驱动板固定连接,同时溜板驱动板在圆弧导轨上运行。利用解析法对摆动机构进行运动学分析。BC为丝杠,定义为主动件,长度为L,则主动杆件以角速度ω1顺时针旋转;AC为从动件,由溜板背板C和固定点A相连接。溜板背板C中心与A之间的距离设为S,丝杠与溜板机构的角位移分别为λ1、λ2,固定点A与电机B中心点之间的距离为l。
为了研究摆动机构沿导轨运动的情况,将摆动机构和导轨的运动关系简化,如图4所示。
溜板机构上的摆动运动可视为一个曲柄滑块机构,其上的机构构成矢量三角形,其矢量方程式为[3]:
摆动机构角位移:
C点的坐标:
投影到x轴和y轴的矢量方程:
由式(5)可得C点相对于A点的位移S和丝杠的角位移λ2:
通过对式(7)求导可得摆动机构内丝杠的角速度ω2表达式:
根據加速度公式α=■可得ω2的角加速度:
式(9)为摆动机构中AC的角加速度。
2 放射源摆动机构有限元分析
2.1 静力学分析
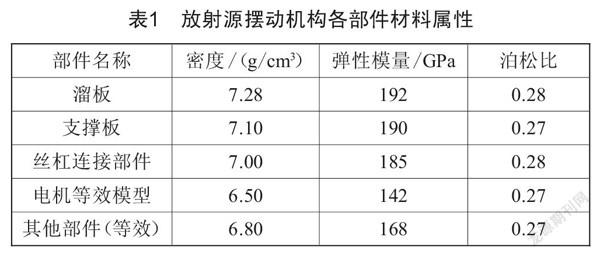
放射源摆动机构主要由弧轨背板、溜板机构、凸轮机构、放射源等装置组成,而溜板机构作为主要的受力部位,为了获知其力学性能,需要对其进行受力分析。摆动机构主要承受轴向进给力,同时弧轨背板上的导轨对于丝杠具有转动约束,通过限位块对摆动插头位置运动进行限制;摆动插头内安装有转向装置,连接放射机构和丝杠沿着导轨运行。采用有限元方法分析溜板机构在最大载荷下的变形及应力分布情况;对溜板机构进行参数化建模,并将其导入到有限元软件中进行受力分析[4],对其中的各个部件赋予相应的材料属性,如表1所示。
对各部件进行网格划分,并按照连接关系分别定义其接触属性,根据溜板所承受的载荷,在溜板上施加500 kg的载荷。对摆动插头和弧形背板设置旋转约束,丝杠受到放射机构的重力,同时对溜板的背板和弧形导轨等施加固定约束进行分析[5]。
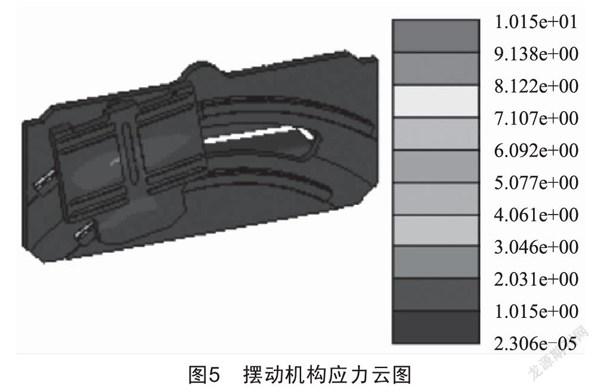
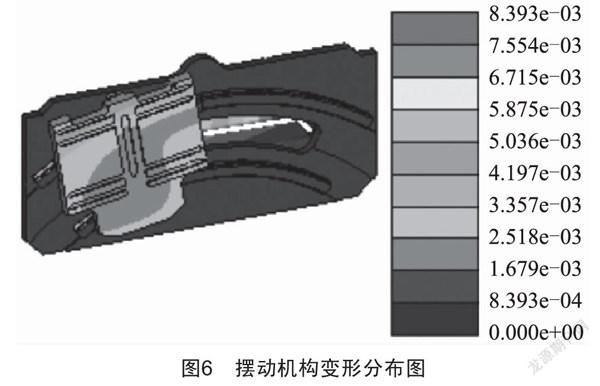
基于以上约束条件以及实际工况载荷,得出摆动机构的应力云图和变形云图,如图5和图6所示。
由图5和图6可知,摆动机构上的丝杠在受到最大扭矩和轴向进给力时,溜板机构最大应力为10.15 MPa,最大变形约0.008 393 mm。通过分析可知,摆动机构的最大变形远低于材料的屈服强度,其变形小于设计要求。
2.2 模态分析
2.2.1 模态分析介绍
放射诊断机构通过溜板机构的带动做弧形往复运动,对摆动结构进行模态分析,并研究其机械的动力特性。由以上设定可知摆动机构的材料属性和结构质量,由模态分析确定摆动机构的固有频率。自由振动的基本方程如下[6-9]:
式中:M为质量矩阵;C为阻尼矩阵;K为刚度矩阵;为加速度向量;为速度向量;X为位移向量;F为作用力向量;t为时间。
模型为无阻尼系统时的微分方程如下:
则假设微分方程的解为:
式中:A为振幅阵列;ω为角速度;φ为初相位。
通过对式(12)进行二次求导得到广义加速度矩阵,再将其代入式(11)可得:
通过将式(13)进行线性方程式组求解,行列式有非零解的条件为系数值等于0,即:
2.2.2 模态分析
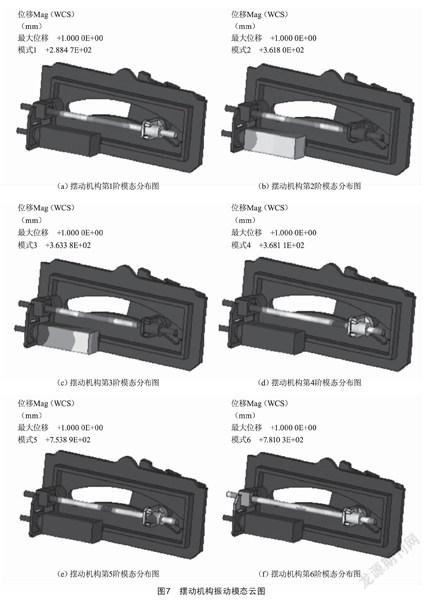
通过对摆动机构进行模态分析,为医疗器械中的结构设计和振动系统故障诊断及其优化设计提供重要依据。对摆动机构进行简化,简化部分螺纹孔和圆角等细微结构。所建模型输出为stp格式,导入有限元软件进行分析,对摆动机构无须添加载荷,仅添加约束即可。采用四面体网格划分,计算前6阶模态振型。其固有频率如表2所示,模态分析结果如图7所示。
3 结语
综上所述,基于摆动机构原理将放射治疗机构和CT诊断机构两者相结合,起到了精确定位的作用,避免了定位误差对放射治疗带来的不利影响,提高了医疗器械诊断和治疗肿瘤的效率及优越性。运用解析法求得摆动机构的运动学关系,并对其进行运动路径分析,获得了摆动机构运动位置与运动速度的关系,为提高摆动机构的定位精度提供了依据;通过对摆动机构进行有限元分析,得到溜板机构的最大应力为10.15 MPa,最大变形为0.008 393 mm;通过对溜板机构的模态分析,获得其固有频率和振动特性,其第1阶固有频率为288.47 Hz,远高于机构的激振频率,产生共振的可能性极小,后续频率逐渐增大。本文所分析的内容对于医疗放射诊断治疗系统整体的机械设计具有重要的参考价值。
[参考文献]
[1] 南振江.摆动导杆式抽油机优化设计及其性能分析研究[D].西安:西安石油大学,2018.
[2] 王龙,崔建昆,刘兵,等.医疗辅助机械臂关节处的球铰结构设计[J].农业装备与车辆工程,2020,58(12):106-109.
[3] 田忠辉,王淑芬.基于位移矩阵的平面四杆机构运动综合[J].大连大学学报,2010,31(6):57-60.
[4] 丁金燕,梁志祥,陈志威,等.弧线摆动式装船机的运行机构探讨[J].起重运输机械,2020(24):57-59.
[5] 钟自成,邵俊杰,李旺年,等.基于Python和ABAQUS的钻机摆动机构拓扑优化设计[J].煤矿机械,2021,42(6):125-127.
[6] 付瑞玲,李文方.M型包裝袋挂面包装机套袋装置设计及模态分析[J].食品工业,2021,42(11):255-258.
[7] 罗坚,徐峰,陈妙芳,等.往复式凸轮夹钳机构的研究与设计[J].科技与创新,2021(21):81-82.
[8] 邓娟,乔禹宁,陈晓旭.采煤机破碎机构机械保护装置改进设计[J].科学技术创新,2021(25):40-41.
[9] 王广.大功率采煤机悬臂式破碎机的改进设计[J].煤矿机械,2019,40(12):122-123.
收稿日期:2021-12-23
作者简介:褚国荣(1966—),男,江苏南通人,高级工程师,研究方向:大型医疗设备的结构研发设计及功能开发。
