模糊PID控制的同步发电机励磁控制方法
2022-03-24关圣凡乌梦悦
王 徽 关圣凡 乌梦悦
(辽宁工程技术大学,辽宁 葫芦岛 125105)
0 引言
同步发电机具有体积小、成本低以及发电能力强等优点,已经逐渐代替传统发电机,并且已经得到了批量化生产。虽然同步发电机具有多种优点,但是也具有一定的局限性,在运行过程中,由于受各种干扰的影响,因此发电机电磁功率逐渐下降,转子电流出现异常波动,定子电压逐渐下降,转子产生较大的摇摆,形成励磁效应。如果不能得到有效控制,同步发电机的稳定性就会受到影响(发电效率降低,严重情况下会引发故障,缩短同步发电机的使用寿命),因此需要采取有效的手段对发电机励磁进行控制。由于国内对同步发电机励磁控制问题的研究起步较晚,因此现有的控制技术和理论还不够成熟,控制水平与国外相比还存在较大的差距。虽然励磁控制问题受到重视,相关学者和专家开展了一系列研究,提出了一些控制思路和方法,但是现行的方法控制效果仍有待提升。在实际应用中,同步发电机转子电流依然会出现异常波动,且定子电压回归稳态时间比较长,控制效果不佳,因此该文提出模糊PID控制的同步发电机励磁控制方法。
1 建立同步发电机等效模型
对同步发电机进行等效分析,建立发电机数学模型。由于同步发电机阴极、阳极磁场之间无直接耦合关系,但是发电机转子与绕组控制、功率与转子之间存在直接的耦合关系,因此在不考虑发电机阴极、阳极磁场之间的耦合关系下,发电机磁链电路状态等效为2个部分,第一部分如公式(1)所示。
式中:Ve2为发电机转子的绕组控制电压;h为发电机极对数;qc2为发电机控制绕组的电气角频率;k2为发电机控制绕组的负载电阻;qe为发电机转子绕组的电气角频率;Ae2为发电机转子绕组控制部分的磁链;Vc2为发电机控制绕组的电压;Tc2为发电机控制绕组的电阻;Yc2为发电机控制绕组的电流;Ac2为发电机控制绕组控制部分的磁链;Hαe2为发电机转子绕组的漏感;Hn2为发电机转子绕组的互感;Ye为发电机转子绕组的电流;Hαc2为发电机转子绕组控制部分的漏感[1]。
在两相旋转坐标系中,功率和转子耦合电路如公式(2)所示。
式中:Ve1为发电机功率绕组的控制电压;Te1为发电机功率绕组的电阻;Ye1为发电机功率绕组的电流;qe1为发电机功率绕组的电气角频率;Ae1为发电机功率绕组的磁链;Vc1为发电机转子绕组的功率电气角频率;Tc为发电机转子绕组的电阻;Yc为发电机转子绕组的电流;qc为发电机转子绕组的电气角频率;Ac1为发电机转子绕组的功率磁链;Hαe1为发电机功率绕组控制部分的漏感;Hn1为发电机功率绕组的互感;Hαc1为发电机功率绕组控制部分的互感[2]。
将同步发电机定子电压和转子电流作为数学模型的输入变量,那么发电机在两相旋转坐标系中的状态等效数学模型如公式(3)所示。
式中:p为微分算子;A为在两相旋转坐标系中发电机转子的磁链分量,即转子绕组功率磁链、转子绕组控制部分磁链的总和;Y为在两相旋转坐标系中发电机转子的电流,即转子绕组电流、控制绕组电流的总和;V为在两相旋转坐标系中发电机定子的电压[3]。
利用以上数学模型描述同步发电机转子的磁链状态,为后续执行控制策略奠定基础。
2 建立模糊规则
由于该文采用模糊PID控制技术对发电机励磁进行控制,因此在励磁控制前,应建立符合与上述同步发电机等效数学模型对应的模糊规则。先建立模糊语集,根据实际需求,用正大、正中、正小、负小、负中以及负大描述同步发电机励磁偏差程度,建立模糊语集,如公式(4)所示。
式中:S为模糊语集;BN为正大;OK为正中;ER为正小;KM为负小;PK为负中;HN为负大[4]。
利用模糊语集中模糊控制子集描述同步发电机转子电流、定子电压的偏差程度,在此基础上利用模糊PID矩阵建立模糊PID控制规则,见表1。
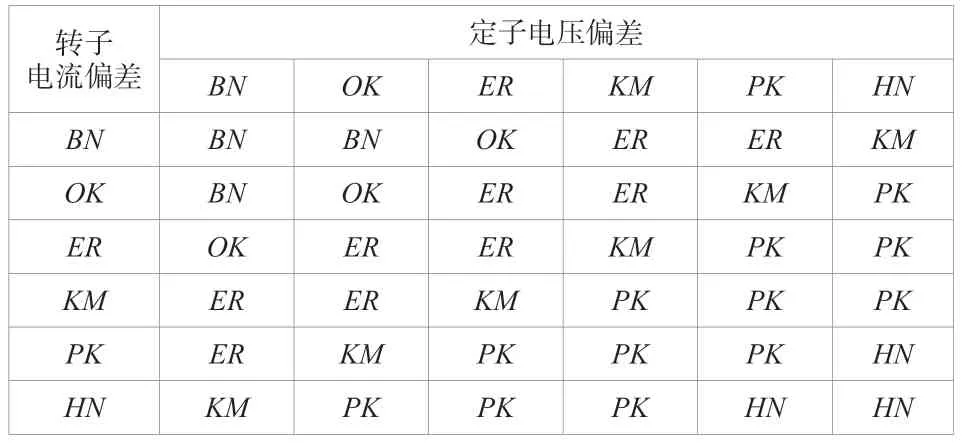
表1 模糊PID控制规则
由表1可知,同步发电机励磁偏差由发电机转子电流偏差和定子电压偏差2个指标确定[5]。将2个状态变量输入模糊PID矩阵就可以输出相应的控制规则,为后续同步发电机励磁模糊PID控制提供依据。
3 发电机励磁模糊PID控制
利用模糊PID控制器对发电机励磁进行控制,其控制步骤如下。
步骤一:确定发电机励磁偏差[6]。根据发电机初始转子电流和定子电压确定2个状态量偏差,利用赋权法确定发电机励磁偏差模糊量,如公式(5)所示。
式中:μ为发电机励磁偏差模糊量;w1为发电机转子电流的偏差权重系数;Y1为发电机转子的初始电流值;Y2为当前发电机转子的电流值;w2为定子电压的偏差权重系数;V1为发电机定子的初始电压值;V2为当前发电机定子的电压值。
步骤二:确定模糊PID控制策略。将公式(5)中的转子电流偏差、定子电压偏差输入模糊规则,得到发电机励磁补偿模糊子集[7]。利用PID控制算法,将发电机励磁补偿模糊子集、发电机励磁偏差模糊量作为输入量,计算控制策略如公式(6)所示。
式中:u(t)为同步发电机模糊PID控制策略;K为模糊PID控制器参数,即比例控制系数;e(t)为PID控制器输入量,即发电机励磁补偿模糊子集;δ、Td分别为积分时间常数、微分时间常数,正常情况δ=0~1,Td=0.5~1.5。
将输入量输入公式(6),输出模糊PID控制策略。
步骤三:发电机励磁控制[8]。根据实际情况设定PID控制器参数,将u(t)代入上文建立的发电机数学模型,对发电机励磁进行补偿处理,以实现基于模糊PID控制的发电机励磁控制功能。
根据上述3个步骤可以实现发电机励磁模糊PID控制功能。
4 试验论证
为了检验该文提出的基于模糊PID控制的同步发电机励磁控制思路的可行性和可靠性,选择某同步发电机为试验对象,该发电机转子结构为绕线转子,座号为200,额定功率为25.45 kW,同步转速为730 r/min,定子槽数为68,转子槽数为42,控制绕组极对数为2对,控制绕组额定电压为400 V,功率绕组极对数为3对,功率绕组额定电压为220 V。利用该文提出的方法对该同步发电机励磁进行控制,并选择2种传统方法作为对比,2种传统方法分别为基于改进量子遗传算法和基于伪广义Hanilton理论,分别用传统方法一和传统方法二表示。在试验中,将该同步发电机定子电阻设定为2.50 Ω,定子电感设定为0.01 H,定子绕组间互感设定为0.36 H,转子绕组间互感设定为0.25 H,转子电阻设定为2.65 Ω,转子电感设定为0.01 H,令同步发电机正常运行。准备型号为HIDFAHA5F8的模糊PID控制器,采用并联的方式接入同步发电机电源总线,作为模糊控制策略的执行单元。同步发电机转子电流的波形情况可以反映发电机励磁的控制效果。因此,根据试验数据绘制不同控制方法的发电机转子的电流波形图(如图1所示)。
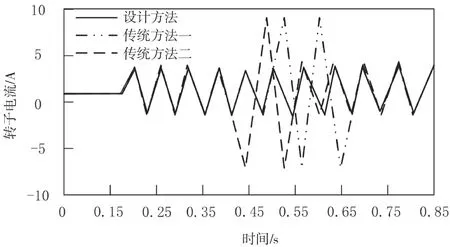
图1 不同控制方法的发电机转子的电流波形图
由图1可知,当使用该文提出的方法时,同步发电机转子电流波动幅度较小,且在运行过程中没有出现电流波形突变的情况,运行比较稳定,说明同步发电机励磁得到了有效控制。当使用2种传统方法时,同步发电机转子的电流分别在0.45 s、0.51 s时出现异常波动,波动时间分别持续1.21 s、1.58 s,并且使用传统方法一时同步发电机电流异常波动2次,说明该文提出的方法具有良好的励磁控制效果。
为了进一步验证设计方法的适用性,以电压对称跌落深度为变量,以对称跌落深度10%为基数,每次增加跌落10%,跌落持续时间为250 ms,直到跌落深度达到80%为止。在不同跌落深度下,对同步发电机励磁进行控制,使用电子表格记录同步发电机电压回归稳态时间,回归稳态时间越短,说明控制方法的响应性能越高,控制效果越好,具体数据见表2。
由表2可知,当使用该文提出的方法时,同步发电机定子的电压回归稳态时间比较短,虽然时间会随着电压跌落深度的增加而不断延长,但是增长比例较小,当电压跌落深度达到80%时,定子电压回归稳态时间仅为0.39 s,可以将时间控制在1 s以内,说明设计方法响应性能良好。当使用2种传统方法时,同步发电机定子的电压回归稳态时间相对较长,并且会随着电压跌落深度的增加而大幅度延长,当电压跌落深度达到80%时,传统方法一和传统方法二的回归稳态时间分别为6.14 s和6.33 s,比该文提出的方法长。由试验结果可知,该文提出的方法的控制效果较好,更适用于同步发电机的励磁控制任务。

表2 使用3种方法时发电机定子的电压回归稳态时间
为了进一步分析模糊PID控制的同步发电机励磁控制方法的控制效果,结合实际工作中的情况,即考虑实际工作中存在各种各样的干扰,因此,在该试验中加入干扰信号,验证设计的控制方法在存在干扰的情况下的工作效果。其中,在0.35 s加入干扰信号,以不同控制方法下发电机转子电流波形的试验为基础,因为考虑在0.45 s时部分方法的同步发电机转子电流波动出现异常,所以在0.35 s加入干扰信号,以达到工作干扰的目标。试验过程仍以设计方法、传统方法一和传统方法二为对比方法,不同方法的发电机转子的电流波形的试验结果如图2所示。

图2 不同控制方法的发电机转子电流波形图
由图2可知,在0.35 s加入干扰信号后,该文提出的方法的发电机转子的电流波形未发生较大波动,发电机转子的电流波形与图1基本一致,说明在加入干扰信号后,该文提出的方法仍然可以有效控制同步发电机的励磁,具备一定的抗干扰能力。但是与该文提出的方法相比,在0.35 s前,使用传统方法一的发电机转子的电流波形就出现了较大波动,但是在0.60 s左右发电机转子电流波形的波动幅度开始减少,而在0.35 s加入干扰信号后,使用传统方法二的发电机转子的电流波形出现了较大波动,与图1的发电机转子的电流波形图相比,波形提前出现了异常波动,由此可知,在加入干扰信号后,该文提出的方法的同步发电机励磁控制效果最好,表明该文提出的方法在提高控制效果的同时,还具有较高的抗干扰能力。
5 结语
针对传统方法存在的缺陷,该文提出了新的控制思路,有效解决了同步发电机转子的电流异常波动问题,并对传统方法进行了优化。该文对保证发电系统稳定运行、提高发电机励磁控制水平具有重要的理论和现实意义。由于该文的研究时间有限,提出的方法尚未在实际中得到大量应用和操作,因此在某些方面可能存在不足,还须对该课题进行深入探究,从而为电力事业的发展提供有力的技术支撑。
