基于VMD 多尺度熵与BP 神经网络的液压设备故障诊断
2022-03-24徐启胜
徐启胜,江 水,李 军,李 岩
(安徽三禾一信息科技有限公司,安徽 合肥 230123)
1 引言
液压设备是指一系列液压装置的总称,一般由动力部分、执行部分、控制部分等控制阀件和辅助部分、管路等组成,具有响应速度快、输出平稳、功率密度大、易实现无级调速以及对复杂工况的适应性强等优点,使其在工程建设、国防、冶金矿山、材料加工等工况复杂的装备中被广泛采用。此类大型设备的状态监测与故障诊断问题,不仅关乎企业的经济效益,更关系到操作人员的人身安全与健康问题,因此对于液压设备进行故障诊断极为重要[1]。
国内外专家学者从20 世纪80 年代起,就开展了液压设备的状态监测和故障诊断等机械设备健康管理研究。Aiwina Heng 等人建立一个综合考虑失效分布的总体特性和状态监测的个体特征模型,实现对设备的运行安全智能预测,并基于液压泵采集到的振动信号数据验证了该模型预测精度[2];Jegadeeshwaran R 等人基于设计决策树算法对液压制动系统的突出故障特征指标进行选择,并使用模糊分类器对不同的典型故障进行分类[3]。以上研究表明,当前国内外学者在液压设备的故障诊断方面做出广泛研究,基于采集的振动信号,建立相关诊断模型,可以实现液压设备故障诊断,但依然存在相关问题。
对于振动信号进行特征提取的目的在于将原始信号中表征液压设备实际状态的特征准确提取,这对于液压设备状态评价和故障诊断具有重要意义。针对液压设备振动信号的非线性、非平稳性和强噪声性,常采用小波变换(Wavelet Transform,WT)、经验模态分解(Empirical mode decomposition,EMD)等时频分析方法进行分析[4-5],WT 为非自适应分解算法,依靠经验性结论选取参数以得到准确分析结果;EMD 可依据振动信号自身特性进行分解,有效避免小波基函数及分解层数人工设定,但端点效应及模态混叠问题较为明显。变分模态分解(VMD)克服了EMD 方法存在端点效应和模态分量混叠的问题,并且具有更坚实的数学理论基础,可以降低复杂度高和非线性强的振动信号非平稳性,分解获得包含多个不同频率尺度且相对平稳的子序列,适用于非平稳性的序列[6-7]。
基于熵理论的特征提取方法近年来在非线性非平稳信号特征提取中多有应用[8],熵说明信号的复杂程度,将信号的包含的信息转化为统计学指标,更直观地表征信号特征。将时频分析方法与熵理论结合的信号特征提取,对于液压设备复杂运行环境中所采集的非平稳、非线性信号,具有良好的应用效果。王涛等[8]将EMD 与排列熵方法相结合,对于EMD 分解后的多个IMF,计算排列熵值和相关系数,根据联合系数最大化原则对筛选出的分量进行信号重构,并利用快速谱峭度对重构信号进行滤波分析,相较于传统的包络解调具有更好的效果。苟先太等[9]对高速列车横向减振器振动信号进行VMD 分解,计算互信息指标筛选的模态多尺度熵(Multi-scale entropy,MSE)特征值,采用支持向量机有效进行了故障判别。
随着计算机技术的发展,深度学习在故障诊断领域得到了快速发展,BP(Back Propagation)神经网络已被证明是一种非常可靠的诊断技术,具有良好的学习能力[10-11]。BP 神经网络在故障诊断的应用是利用非线性映射的BP 网络对非线性相关的故障进行信息收集。神经网络的输入参数是故障原因,输出是故障类型,BP 神经网络由神经元组成,通过权重系数将各个神经元相互联系,使其具有较强的自学习能力。
因此,本文提出了一种基于VMD 多尺度熵与BP 神经网络的液压设备故障诊断方法。对于采集到的液压设备振动信号,利用VMD 分解效果将信号分解到不同尺度IMF,计算有效IMF 的多尺度熵特征值并构建特征向量集,进一步输入建立好的BP 网络,输出液压设备故障分类,实现故障诊断。使用相关数据集进行验证,本文提出的方法具有普适性且应用效果较好。
2 基本原理
2.1 VMD 算法原理
VMD 是一种新的自适应时频分析算法。基于变分问题完全非递归的方式,使复杂信号分解得到多个IMF,每个具有自主中心频率,以及有限带宽它有坚实的数学基础,本质上是一种特殊变异模型的迭代求解过程。VMD 理论由变分模型的建立和变分模型的求解两部分组成。
2.1.1 变分问题构造
在EMD 理论中,固有模函数被定义为信号分量,其特征是其极端点和零交叉点的数量等于或最多不同一个,其上包络和下包络的平均值由任何时间点的局部最大点和局部最小点决定。为了建立信号分解的变分模型,VMD 放弃了上述定义,将IMF重新定义为调频(AM-FM)信号uk(t),即:

Ak(t)是关于uk(t)的瞬时幅值,且Ak(t)≥0;φk(t)是uk(t)瞬时相角。对φk(t)进行求导,得到φk(t)瞬时频率:
其中:ωk(t)≥0
由k 个IMF 合成一个信号f,进而针对信号f 进行变分问题构造:
(1)针对模态函数ωk(t),对其单边频谱进行Hibert 变换,获得对应解析信号,即:
(2)基于模态函数频谱,进行调制解调,期间加上修正系数e-jwkt即:

(3)最后计算该公式的梯度平方L2范数,算出各个模态函数uk(t)的带宽,构建相应约束变分问题。该变分问题表示为:

式中,{uk}为分解出k 个IMF,即{uk}={u1,u2…uk};{wk}为各IMF 中心频率,即 {wk}={w1,w2…wk};*表示卷积;∂t为函数时间导数;δ(t)为单位脉冲函数。
2.1.2 变分问题求解
为了得到变分模型的最优解,利用二次惩罚因子和拉格朗日乘数,对约束问题变换为不受约束的问题从而构造的变分问题求出最优解。
(1)上式可以看做对非约束变分问题求解,于是使用二次惩罚因子α;进一步基于Lagrange 算子λ,其为了在求解过程中,也可以确保约束条件严格性。从而生成增广Lagrange 函数,公式如下:

(2)继续求解,计算得出非约束性变分问题,即采用相互交替的方式,不断更新ukn+1、wkn+1和λn+1,从而得到最优解,模态分量ukn+1公式如下:

(3)利用傅里叶变换定理,从而转换至频域处理,可以将非负频率积分,最后计算出二次优化解,进行更新,具体表达式如下:
同理,也在频域中,处理中心频率问题,对分量中心频率更新,具有按下式进行:

2.1.3 VMD 算法流程
对于VMD 分解求解过程,便是将模态转换至频域内,直接在频域持续不断更新,最后,采用uk(ω)傅里叶逆变换,逆转换得到时域实部uk(t),具体流程如下:

VMD 算法流程如图1 所示。

图1 变分模态分解算法的流程图
2.2 多尺度熵原理
多尺度熵算法最先由Costa 等提出,该算法基于样本熵,从不同尺度描述信号不规则程度。通过对原始数粗粒化处理,计算得到数据序列在多个尺度下的样本熵。对于相同尺度下的不同数据序列,样本熵值高的序列具有更高的复杂性,由此体现数据序列之间的差异性。对于给定原始数据序列X=[x1,x2,…,xL],L 为序列长度,其多尺度熵的由以下步骤计算得到。
(1)采用粗粒化算法处理原始序列,得到新的时间序列:
式中:j=1,2…,N,τ 为尺度因子,每一个粗粒化后的时间序列的长度N=L/τ,τ=1 时即为原始序列。
(2)将粗粒化序列组成一组m 维矢量:

式中:ij=1,2…,N-m+1,i≠j。
(4)给定阈值r(r 称作容差,r>0),对于每个i≤N-m+1 的值,统计的数目H 与距离总数N-m+1 的比值,记作,其平均值记作:

(5)增加维数至m+1,重复步骤(2)~(4),从而得到尺度为τ,嵌入维数为m+1 时的,求其平均值得到Cτ,m(r);
(6)当N 为有限数,尺度为τ 时,定义样本熵为:

多尺度熵由不同尺度的样本熵组成集合,表示为:

多尺度熵的计算需确定嵌入维数m、相似容限r和尺度因子τ 三个参数,一般情况下,m=2,r=0.1~0.25δ(δ 为原始数据序列的标准差),τ≤20。本文选取m=2,r=015δ,τ≤16。
2.3 BP 神经网络原理
BP(Back-Propagation)神经网络是一种以误差反向传播算法训练的多层前馈神经网络。整体结构如图2 所示。

图2 BP 神经网络结构图
xi(i=1,2,3,…,12)为输入向量;l 为隐含层节点数;wi为输入层与隐含层之间的连接权值;wjk为隐含层与输出层之间的连接权值;γj为隐含层阈值;f(x)为隐含层激活函数,激活函数使用sigmod 函数。
实现步骤如下:
(1)网络参数初始化。网络权值wij、wjk和阈值γj、θk的初始值取为零附近的随机数值。
(2)计算隐含层输出hj的公式如下:

(3)计算输出层输出Ok的公式如下所示:

式中:θk为输出层阈值。
(4)误差计算。选用交叉熵代价函数代替二次代价函数,使得训练收敛速度更快。误差E 计算公式如下所示。

式中:yk为期望输出;d 表示一次输入的样本总数。
当E 小于期望误差ε 或达到预设的学习次数则训练终止,输出训练好的神经网络参数模型,否则进行参数更新。
(5)输出层权值及阈值更新。采用梯度下降法进行更新,公式如下所示:
式中:q 为训练次数。
(6)隐含层权值及阈值更新公式如下所示:

(7)网络参数调整后,返回步骤(2)。
3 基于VMD 多尺度熵与BP 神经网络的故障诊断
基于上述理论基础,对于液压设备采集的振动信号,本文将VMD 和多尺度熵的信号特征提取方法相结合,采用VMD 对原始信息进行分解,对于分解后的多个IMF,计算有效IMF 的多尺度熵特征值构成特征矩阵,划分训练集与测试集,将训练集数据搭建的BP 神经网络模型,将测试集输入训练完成的模型,从而获得测试集分类结果,并计算故障分类准确率,该液压设备故障诊断方法流程如图3 所示。

图3 故障诊断方法流程图
4 实验验证
为验证诊断方法的有效性,采用液压数据进行验证,溢流阀故障、减压阀故障以及液压泵故障这3种故障是液压设备的主要故障。首先对采集到的这3种故障振动信号以及正常振动信号进行归一化预处理,然后使用VMD 进行信号分解,VMD 参数设置如表1 所示。

表1 各类状态信息VMD 分解参数
每个IMF 分量都包含了原始数据在不同时间尺度上的特征值信息,选择分解后前4 个IMF 计算多尺度熵作为故障信号特征据集,其中包括4 类状态(正常、溢流阀故障、减压阀故障以及液压泵故障),每类状态都有500 个样本,每个样本长度为4096,共计2000 个训练样本。对特征数据集进行划分:70%训练集(1400 个训练样本)、30%测试集(600 个训练样本),在数据集种,针对液压设备4 类状态,分别选取其中3 个多尺度熵特征向量,如表2 所示。
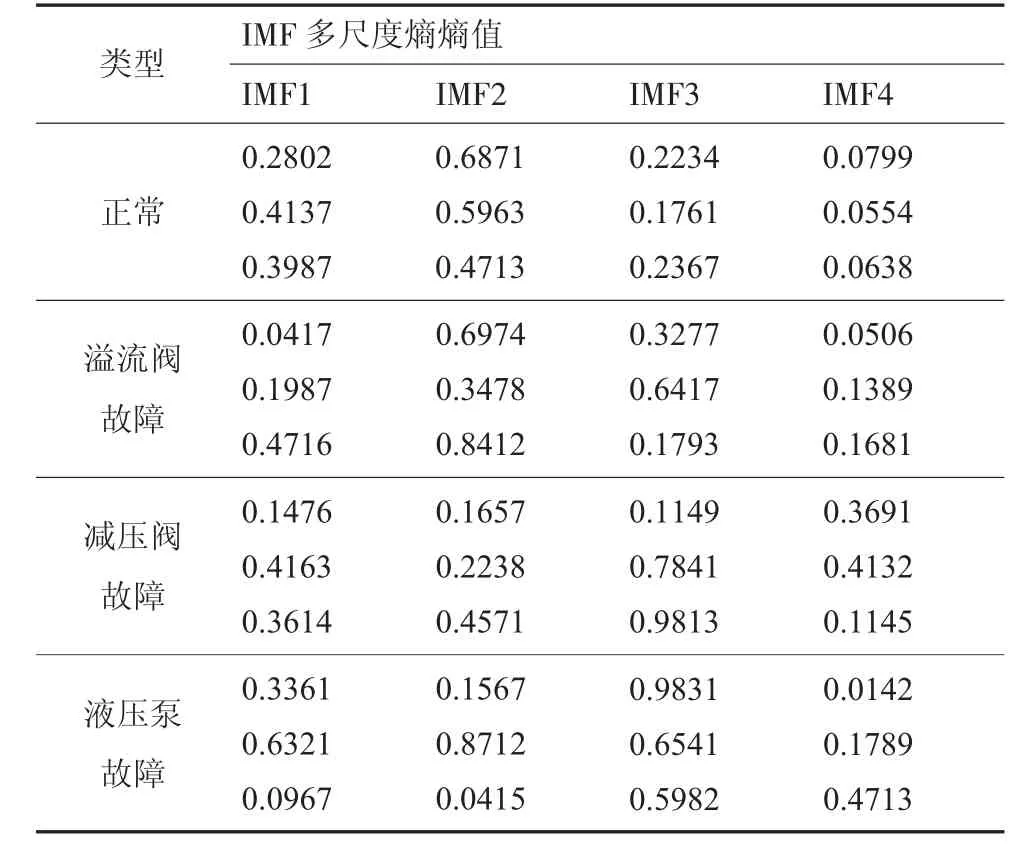
表2 数据样本特征向量
将训练集输入BP 神经网络进行训练,实验迭代达到最大训练次数或者达到训练精度,则算法终止。本方法对应所建模型参数设置如下:1 个输入变量和1 个输出变量,神经网络应有1 个输入节点和1 个输出节点。根据Kolmogorov 定理,确定隐含层层数为2层,隐含层神经元个数为7 和13 个,激活函数为Sigmoid 函数,输出层为Softmax 函数,最大迭代次数为1000 次,训练均方误差为0,训练速率为0.005。将测试集输入训练好的BP 模型输出最终诊断结果如表3 所示。从表中可以发现,在液压设备故障诊断过程中在正常运行状况中出现1 次误诊断情况,其余故障在每种故障150 样本的情况下出现小于次的误判,故障准确率达到了96%以上。整体故障诊断准确率达到97.66%,说明该方法用于液压设备故障具有较高诊断精度,满足液压设备诊断需求。

表3 液压设备故障诊断结果
5 结论
本文提出了一种基于VMD 多尺度模糊熵与BP神经网络的故障诊断方法,并运用于液压设备故障诊断。VMD 具有更好的分解效果,避免模态混叠等不良表现,同时使用多尺度熵能够有效表征不同液压设备故障类型,为更好地进行故障诊断,使用深度学习中的BP 神经网络,具有较高的故障诊断精度,为液压设备故障诊断提供新的思路。
