基于UWB的室内自主无人车跟驰系统定位研究
2022-03-23高文帅张锐步子豪冯俊王萌
◆高文帅 张锐 步子豪 冯俊 王萌
基于UWB的室内自主无人车跟驰系统定位研究
◆高文帅 张锐 步子豪 冯俊 王萌
(武汉理工大学自动化学院 湖北 430070)
从京东及天猫超市的智能仓库可以看出,利用无人车代替人工已经成为物流行业未来主要的发展方向。仓库等室内环境复杂多变,GPS信号穿透性差导致的定位效果也相对有限。WIFI作为室内常用的信号基站,信号覆盖面较小,且作为基站不能随意移动。而UWB技术则在传统无线通信的基础上进一步发展,具有穿透性强,信号覆盖面广,提供厘米级定位精度等优点。本文基于UWB技术,利用TDOA算法进行迭代,从而消除UWB的定位误差,实现克服室内复杂环境的定位功能。
无人车;UWB定位;TDOA算法
自主无人车或称为无人车、智能体、智能机器人等,是一个可以对智能产业技术进行综合利用的集合体,涉及如今智能产业的各个方面,比如,传感器技术、控制技术、车辆工程、图像识别和神经网络等。在货运这个劳动力十分密集的行业,可以利用无人车实现货物的短距离运输,甚至货物的出纳。在此情况下,结合定位算法的载物车则既能使物流工人的搬运压力更小,也可以提升工人的工作效率。本文将对无人车的精准定位提供一个仿真并且实现的思路。
1 UWB
超宽带(Ultra Wide Band,UWB)技术是通过利用纳秒级的非正弦波窄脉冲来承担传输任务的,与传统正弦波作为载波的方式相比,UWB定位技术所占用的频谱范围更大。尽管是通过无线的方式进行通信定位,但该技术的数据传输速率已达到数百兆比特每秒。美国联邦通信委员会(FCC)对UWB的定义声明中描述:在3.1GHz~10.6GHz频段中占用500MHz以上的带宽的定位技术。由此可见,UWB传输信号技术能够在非常宽的带宽上进行。此外,由于UWB设备间通信能够直接通过发射冲击脉冲串的方式进行,此时发射的信号既可以看成基带信号,也可以看成射频信号,而不再需要具有传统的中频和射频概念。
2 UWB定位算法
UWB定位系统的组成主要分为三个部分,首先是携带有标签的定位目标,其中标签的主要功能是作为一个和定位目标共同移动的信号源。该信号源持续以某一频率向周围的接收装置发送UWB信号。
其次是固定安装UWB基站,专门用于接收和应答标签发送的信号,同时记录接收时间等信息,将以上信号转换为数据转发给中央处理器进行处理,再将信息整合打包发送给上层设备,为了减小定位误差和保证信号的有效接收,一个定位空间内最好安装3个以上基站。
最后是接收定位信息的用户端。在UWB定位系统中,用户端通过WIFI或者其他通信方式接受UWB基站传送的信号。依托用户端的终端机,可以实时地通过人机交互的方式为用户展示标签的位置等信息。
鉴于UWB信号的交换频次足够快且时间差已知,通过适当的算法就可以实现标签的实时定位。UWB的常用定位算法有TOA(Time of Arrival)的测距法,TDOA(Time Difference of Arrival)算法,RSSI(Received Signal Strength Indication)算法,AOA(Angles Of Arrival)信号到达角度法。
2.1 TDOA到达时间差算法
TDOA(Time Difference of Arrival)算法是一种利用信号到达时间差的定位算法。通过测量信号到达监测站的时间,可以确定信号源的距离,因为到达时间差是固定的,即可在二维平面内确定一个双曲线,在二维平面内三个基站即可确定三个可能的双曲线,理想状况下三个双曲线的交点即为标签所在位置。然而由于基站中微处理器处理数据需要时间,三个基站很难建立严格的同步时钟,不同的时钟误差对于定位误差的影响如表1所示,其中T是设备B处理UWB信号的时间。由于光速为0.3m/ns,此外UWB定位系统本身的定位精度为厘米级,可以看出系统时钟的微小偏差还是可能造成定位上的较大误差。
表1 T与时钟偏差关系
clock error T2ppm5ppm10ppm20ppm40ppm 1000.1ns0.25ns0.5ns1ns2ns 2000.2ns0.5ns1ns2ns4ns 5000.5ns1.25ns2.5ns5ns10ns 1ms1ns2.5ns5ns10ns20ns 2ms2ns5ns10ns20ns40ns 5ms5ns12.5ns25ns50ns100ns
TDOA算法是通过检测信号到达两个基站的时间差,而不是到达的绝对时间来确定标签的位置,降低了标签与其他基站的时间同步要求。
如上所述,两个信号的到达时间差就意味着两个信号到达的距离差。在理想情况下,一组基站即两个不同的基站就可以在二维平面内确定一对双曲线,这对双曲线的焦点就是基站,标签的位置就在双曲线的位置上。三个基站就可以在二维平面内确定两组双曲线,两个双曲线的交点就是标签所在的位置。从这个角度讲,TDOA算法不是直接利用信号的到达时间,而是利用多个基站收到信号的时间差来确定标签的位置。TDOA算法不需要加入专门的时间戳,定位精度也有所提高。在二维的情况下,TDOA的定位模型如图1所示。

图1 TDOA原理图


对其取平方可得,

其中,


其中,为光速,d,1为测得的TDOA测量值。可以先进行线性化处理来求解该方程组。已知,
将式(4)展开得,

将=1代入式(2-2)可得,

用式(5)减去式(6)可得,

其中,

3 定位模型
本文定位算法采用基于UWB技术中的TDOA算法对小车进行定位,如前文所述,TDOA算法使用到达时间差原理,而不是到达的绝对时间来确定标签的位置,这种方式可以有效降低标签与其他基站的时间同步要求。此外在计算机仿真中,因为S=Vt,可以将标签与基站之间的到达时间替换为到达距离,从而减小对于计算资源和基站的需求,在计算机仿真中也会有更高的准确性。
为了实现TDOA定位算法还需要基站之间的相互位置,以及坐标系的建立。在本次仿真中以UWB基站中其中一个基站作为原点建立坐标系,为使定位更加准确,同时也为了拟合室内环境,本文定位仿真将UWB基站定位为理想等边三角形,如图2所示。
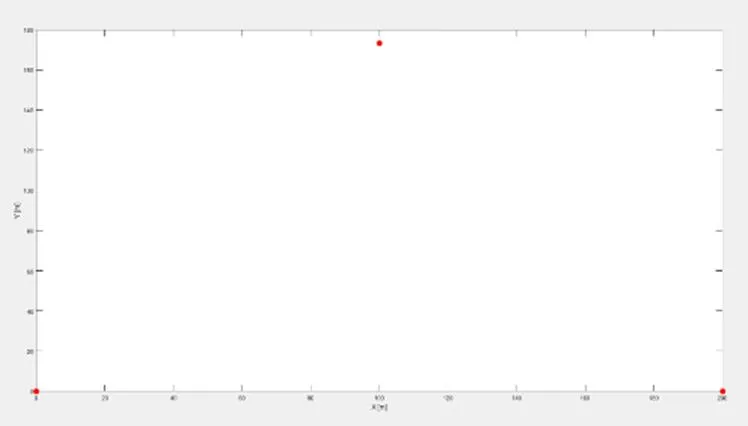
图2 TDOA算法基站位置
其中红色小点为基站位置。
设定好UWB定位算法基站位置后,在MATLAB中将以如下方式实现TDOA定位算法,并运用以下数据量:
(1)LS作为基站的位置坐标;
(2)Sensor作为标签的位置信息;
(3)R1,R2,R3分别为标签与各基站之间的距离。
在确定好计算TDOA所需数据之后,对sensor添加1.5%的噪声误差。然后采用迭代方式来消除TDOA误差。具体方式为:
第一步,计算TDOA数据;第二步,初始化输出数据;第三步,对所得到的到达时间差数据进行处理,并与当前重新测得的到达时间差数据进行比较处理,得到新的到达时间差数据。第四步,进入迭代过程,重复处理上一步的计算结果,将误差对定位坐标影响降到最低。
通过以上方式可以计算出标签较为准确的理论位置。定位结果图如图3所示。

图3 TDOA算法定位结果图
其中红色小点为基站位置。蓝色小点为标签的实际位置。黑色小点为添加误差并经过迭代计算后所得到的标签位置。同时记录多组数据可以得出定位误差与迭代次数关系。表2为定位迭代次数与对应的多组定位数据。
表2 部分误差与迭代次数关系
标签实际坐标位置标签定位坐标位置定位误差迭代次数 X轴坐标Y轴坐标X轴坐标Y轴坐标 0.6076142.11790.3960142.96610.8742260 128.428743.4050129.268242.82671.0194210 128.468158.4504126.563058.13831.9305160 192.328595.5394193.200497.32161.9840160 145.4747104.3171146.0754106.36402.1332140 137.8762107.2955138.3896105.08422.2700140 174.163545.7342174.869148.27382.6358120 16.030249.744713.335549.13002.7639120 168.360374.0610170.692875.91682.9807110 171.3360138.8255171.6415142.13803.326550 192.418785.3775195.752586.01783.394750 90.6403120.962693.9902122.11583.542940 161.1307118.1337157.9461116.30383.672940 174.0107184.0007176.5098197.294113.52690 1.1654194.5333-1.8439208.179013.97360
在定位过程中可以看出,有噪声干扰的情况下,迭代可以有效地消除TDOA算法的误差。随着迭代次数的增加,误差也会随之减少。可以推断,在实验环境理想的情况下,当迭代次数足够大时,误差也会趋近于零。但是在实际使用过程中,算法实时性是定位系统必须考虑的重要因素,决不允许算法在计算标签位置上花费过多的时间,这会影响到定位算法的准确性和实用性。因此为了模拟真实的使用环境,应在保证定位误差的情况下,尽量减少迭代次数。
由表2所示,定位误差会在开始阶段随着迭代次数的增加而不断降低,当误差降低到一定的范围,迭代的效果也会随之减弱。在第150次左右的迭代计算,已经有效地减小了误差,并且可以很快地得到定位坐标,更好地兼顾了系统计算时间和定位准确性的要求。
4 结论
本文通过分析无人车的具体使用环境,利用基于UWB定位技术,采用TDOA算法完成无人车的定位仿真部分,并通过迭代方式来尽量减小定位误差。在迭代次数与计算速度之间找到了一个平衡点,这样既能快速计算出结果,也保证了定位的准确。UWB技术定位效果相对优良,但是定位距离较短,在做具体相关设计研究时,可以对UWB算法做进一步的改良来适应实际算法,从而达到更优定位效果。
[1]游小荣,裴浩,霍振龙.一种基于UWB的三边定位改进算法[J].工矿自动化,2019,45(11):19-23.
[2]李伟杰,戴亚文,唐雨,等.基于UWB的地铁隧道定位系统设计[J].计算机测量与控制,2019,27(08):198-201.
[3]吴如玥,黄风华,邹驼玲.基于UWB的室内定位系统研究[J].信息与电脑(理论版),2019(14):110-112.
[4]万鹏武. TDOA被动定位关键技术研究与应用[D]. 西安电子科技大学,2018.
[5]韩霜,罗海勇,陈颖,等. 基于TDOA的超声波室内定位系统的设计与实现[J]. 传感技术学报,2010,23(03):347-353.
[6]俞一鸣,姚远,程学虎. TDOA定位技术和实际应用简介[J]. 中国无线电,2013(11).
[7]刁培培. 射频技术和AGV小车辅助下物流自动化仓储定位方法研究[J]. 物流技术(装备版),2014,000(001):94-97.
[8]姜春生,廖颖慧,蔡博. 基于UWB的物流仓储自动导引车的定位系统研究[J]. 计算机时代,2019,323(05):9-12.
