带有V2G并网的电动汽车用增程器控制策略
2022-03-21魏洪乾张幽彤蒋新柱艾强赵文强
魏洪乾,张幽彤,蒋新柱,艾强,赵文强
(1. 北京理工大学 机械与车辆学院,北京 100081;2. 清洁车辆北京市重点实验室,北京 100081)
排放法规的日益严峻和交通行业的“双碳”目标推动燃油汽车的电气化进程. 电动汽车因其驾驶无污染、经济效益突出逐渐得到市场的青睐[1]. 但同时其续驶里程短、充电时间长且换电成本高的缺点一定程度上制约着纯电动汽车的推广与发展[2]. 因此,用于扩展电动汽车续驶里程的增程系统逐渐成为研究的热点[3]. 最常用的电动汽车增程器由发动机、发电机及其控制系统组成,类似于混合动力汽车的串联式结构. 发动机只与发电机相连,整个增程器以电能的方式对外输出能量,可以保证发动机始终工作在高效率工作区,减少燃油消耗的同时减少尾气污染.
现阶段增程器的研究主要围绕系统的布局优化和能量管理策略展开. 转子发动机型增程器[4]可以利用燃气直接推动转子产生转矩,无需曲轴连杆机构,因此功率体积比高,但是高油耗和尾气污染以及对发电机的重构都限制了其在电动汽车上的应用.此外,更多的增程系统研究围绕能量管理策略开展.龚贤武等[5]匹配了电机的工作特性和整车的动力性能,增加了电动汽车的续驶里程. YANG 等[6]利用模糊控制理论对增程系统的功率需求和电池SOC进行了优化,保证了系统的燃油经济性. 陈德海等[7]分析了电动汽车的电池健康状态,优化了电池的循环放电次数和母线电压压降,以提高汽车的总体续航里程. 杨波等[8]进行了柴电混合动力单元的增程发电效率研究,重点分析了影响增程系统的关键参数,并且指出柴油机的转速波动、电机转矩调节速度等对动力单元稳定性起到重要作用. 李永亮等[9]对增程系统的工作模式进行划分,并且针对纯电模式的主减速比进行了优化,采用粒子群寻优算法对增程模式下的功率跟随策略进行了优化求解. 牛继高等[10]对发动机的功率进行了划分,并且设计了不同功率等级的增程控制策略,优化了系统布局和效率曲线.尹安东等[11]采用遗传算法提出了3点控制策略,对发动机的燃油经济性、发电机的发电性能进行了参数优化.
电动汽车的动力电机制动发电技术已经得到系统化的推广. 胡宇辉等[12]对单轴并联混合动力客车再生制动策略进行了深入解析,提出了一种逆向解析方案,分析各参数对制动发电的影响,扩展了电机的功率阀,并且提高了电池的寿命. 为了解决车用增程器的发电工况反电势较大的问题,王永杰[13]提出了单电流调节弱磁稳压控制算法,利用小信号稳定性分析手段优化了增程器启动/发电系统的发电稳压过程. 卢铁军[14]对混合动力汽车电动机、发电机一体化的永磁同步电机弱磁矢量控制策略展开研究,分析了控制系统的功率需求,并对发电过程的功率损耗进行了分析. 蒋佳明[15]分析了增程器发电机的发电功率和效率,对交直轴磁路交叉耦合下的弱磁控制策略进行了系统设计. 可以发现当前关于永磁同步电机发电控制系统的研究局限于系统的整体优化,缺乏对增程器发电的控制精确性和经济成本考量.
尽管当前已经对增程式汽车的动力匹配、能量管理和控制策略开展了许多探究,但是上述研究并没有充分利用增程器的发电优势. 例如,增程系统在电动汽车闲置时可以通过逆变器发电并馈电至电网,真正实现电动汽车-增程器-电网的3端有机集成.实现电动汽车的增程系统集成能够有利于多应用场景,如家庭用紧急情况下的电力补给、电池并网的“削峰填谷”功能以及纯电动汽车的增程续航等. 因此,本文在原有增程系统的基础上,利用电机逆变器实现了对电机的驱动和发电馈网(vehicle to grid,V2G)功能. 具体提出了增程控制系统的精确电气位置估算算法,增程系统的多目标优化能量管理策略以及增程发电系统的动态切换策略. 综上所述,本文的创新点总结如下:
①本文设计了解耦双同步参考系锁相环电气相位估算算法,实现了基于廉价霍尔位置传感器的增程系统电气相位和电网相位捕捉功能,一方面提高了系统的位置计算精度,另一方面减少了增程系统的整体经济开销.
②本文利用多目标优化算法对增程器的油耗和启停次数进行了优化,保证增程系统始终工作在高效率工作区,减少了系统油耗和整机碳排放.
1 系统模型设计
1.1 整体设计方案和功能描述
本文提出的增程系统结构如图1所示,该增程系统是纯电动汽车的辅助动力系统,取消了充电桩的设计,仅保留三相充电插口. 动力电池的充电功能完全由增程器实现,此举降低了硬件成本和设计复杂性. 综合来说,增程系统控制器可完成发电机驱动、电池充电及V2G馈网功能.
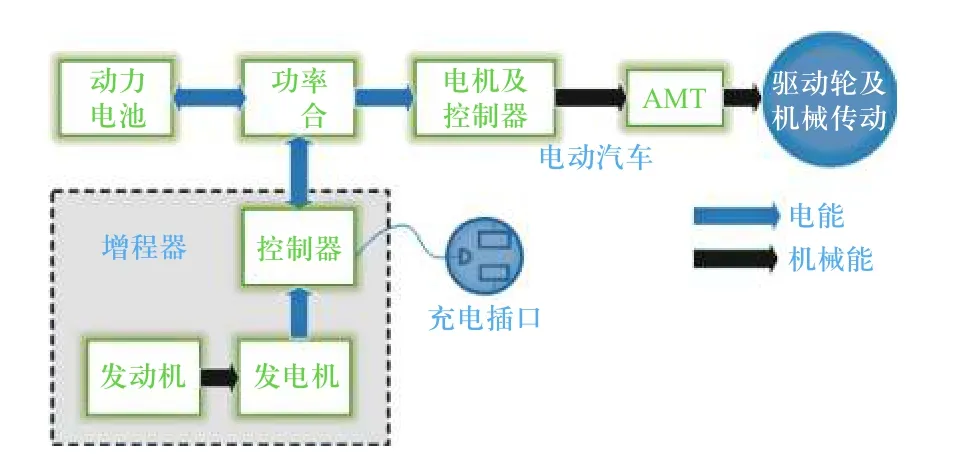
图1 增程系统的结构示意图Fig. 1 Diagram of the range-extender
增程器的控制系统主要包含有IGBT模块(电机驱动模块)、电机控制器、发动机控制器、接触器和增程器控制器等部件,如图2所示. 其中接触器负责IGBT模块的三相线连接模式. 根据连接模式的不同,该控制系统主要实现下述4个功能:
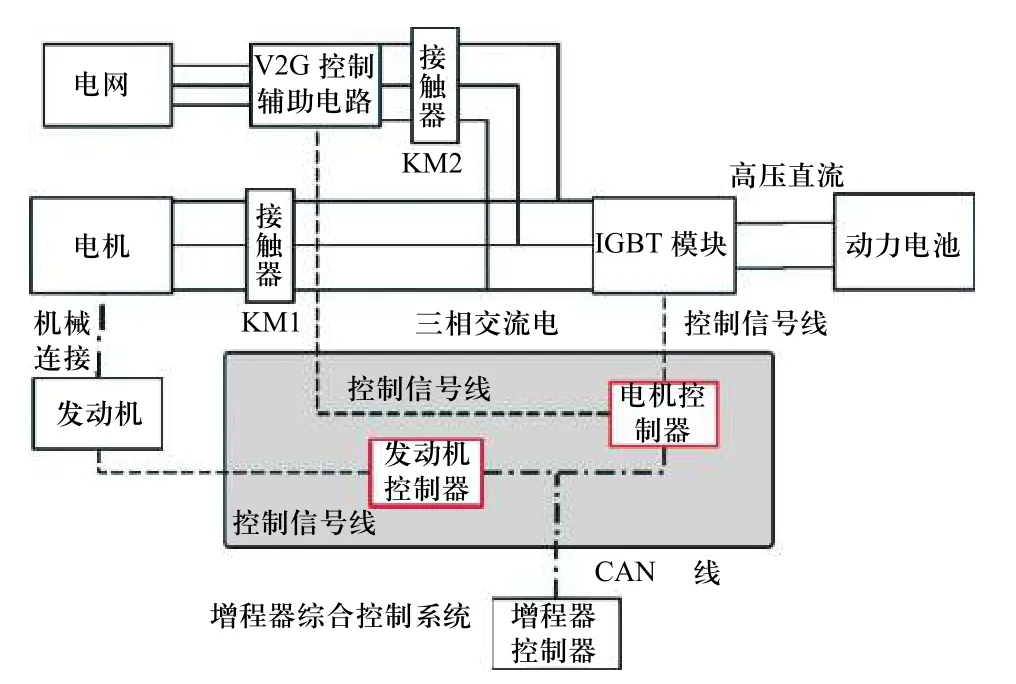
图2 增程器的控制系统Fig. 2 Control system of the range-extender
①仅接触器KM1闭合时,IGBT模块与发电机连接,可控制电机工作在电动工况,将发动机拖至怠速附近使发动机点火.
②仅接触器KM1闭合时,发动机控制器控制发动机工作,同时电机工作在发电模式. 二者协同配合给电动汽车的动力电池充电.
③仅接触器KM2闭合,IGBT模块连接到电网,电机控制器将电网的交流电整流为直流给动力电池充电.
④仅接触器KM2闭合时,电机控制器将动力电池的直流电逆变为交流电回充入电网,实现V2G功能. 这一过程类似于家用光伏能源的原理,将发电能量并入电网. 本部分功能可以将电池中的多余电量反馈给电网,以充当临时的家用电源防备不时之需.
1.2 增程器的选型与匹配
本文选用的增程器主要针对奇瑞EQ1电动汽车使用. 根据汽车的功率平衡方程计算得到增程器的功率需求为

式中:v为车辆行驶速度;m为汽车质量;η0为速度转化系数;f为路面阻力系数;CD为空气阻力系数;A为前迎风面积;σ为汽车加速度系数.
加装增程器后的整车质量 为1 695 kg. 假设增程器使电动汽车的续驶里程增加至500 km,动力电池不能过放电,选择最小的SOC为20%. 由此,计算得到的增程器需求功率PAPU为

式中:E为动力电池所能提供的能量;S=500为电动汽车的总续驶里程;v=90 km/h. 结合式(1)(2),可以确定增程器的输出功率需求至少为PAPU=11 kW. 本文选用较为成熟的直列4缸汽油机作为增程器的原动机,发电机采用永磁同步电机,具体参数如表1所示.
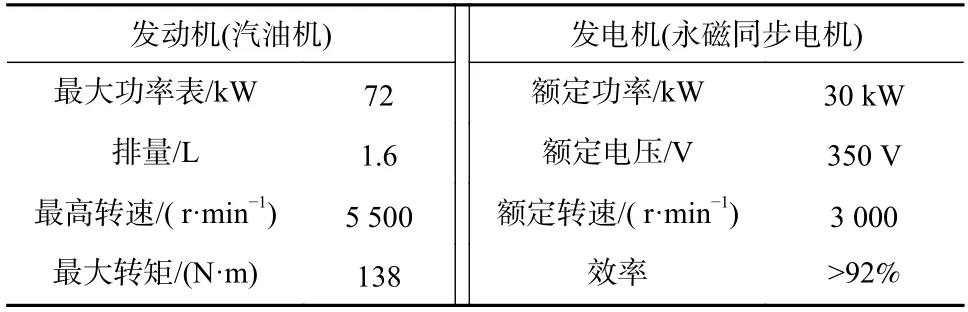
表1 发动机和发电机参数Tab. 1 Parameters of engine and motor
发动机的最大功率为72 kW,最优工况点根据功率需求和发动机的万有特性求解得出. 选择电机的整体发电效率为92%,因此发动机的输出功率约为12 kW. 根据发动机万有特性曲线与功率需求曲线(如图3和图4所示),输出功率为12 kW时,发动机的最优发电工况确定为转速1 750 r/min,转矩为65 N·m.实际增程器功率跟踪控制时,最优工况点仅作为优化变量参考使用.
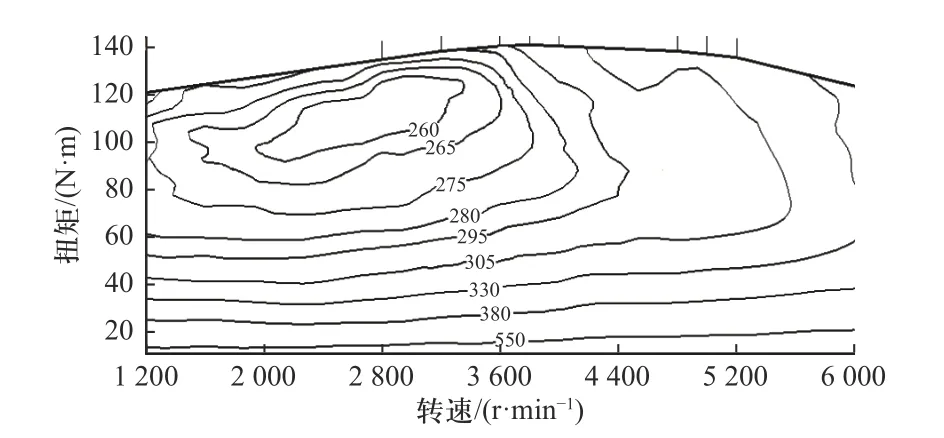
图3 发动机的万有特性曲线Fig. 3 Universal characteristic curve of the internal combustion engine
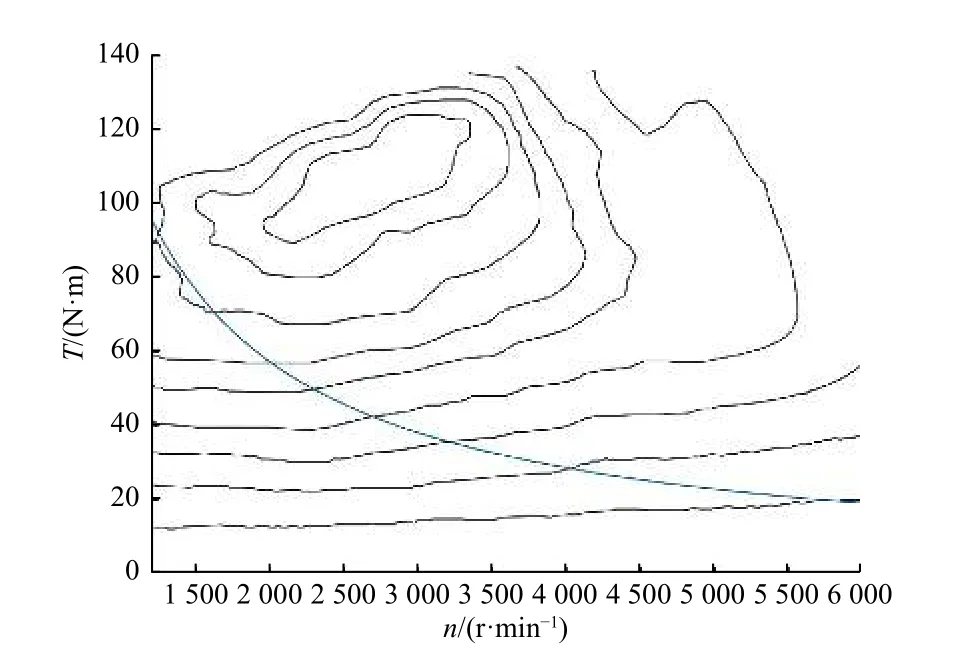
图4 发动机的万有特性曲线与目标功率曲线Fig. 4 Targeted power curve and universal characteristic curve of the engine
为简化文章结构,本文不再对发动机和发电机的控制方式进行陈述,相关的控制算法可参照之前的研究[16]. 发动机、发电机及动力电池的匹配方法依据文献[9]中的匹配方法获取.
2 增程器并网发电控制
2.1 增程器电气相位的跟踪控制
增程器的发电功能主要依赖于发电机的矢量控制,而精确的电气相位决定了整个系统的控制性能.传统电气位置信号采用旋转变压传感器实时采样,这会增加整个系统的经济成本. 为此,本文设计了基于廉价霍尔传感器的解耦双同步参考系锁相环(decoupling dual-synchronous reference-phase locked loop,DDSRF-PLL)位置估算方法,实现了电气位置的准确观测,同时用于后续电网相位的跟踪.
电机在d-q轴坐标系下的定子电压方程可表示为
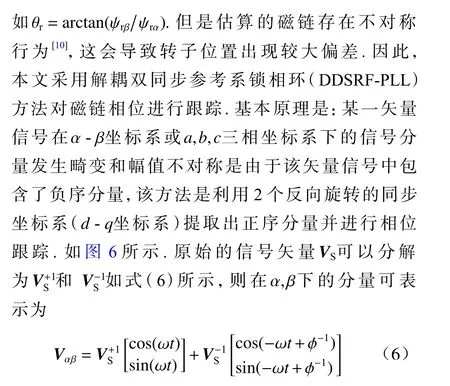
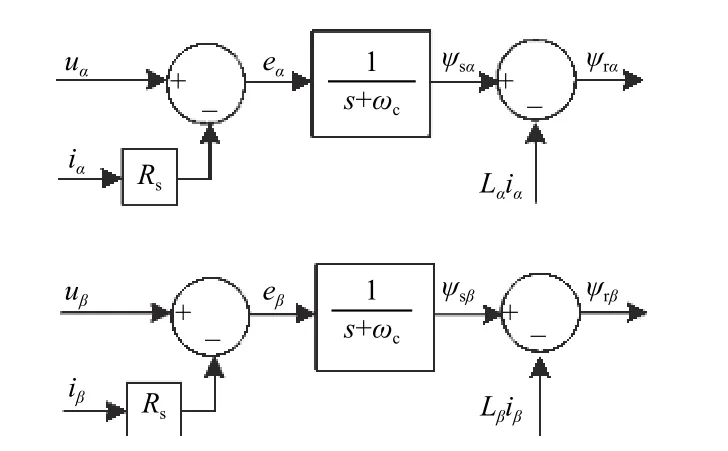
图5 基于一阶低通滤波的磁链计算Fig. 5 Flux calculation based on first order filter
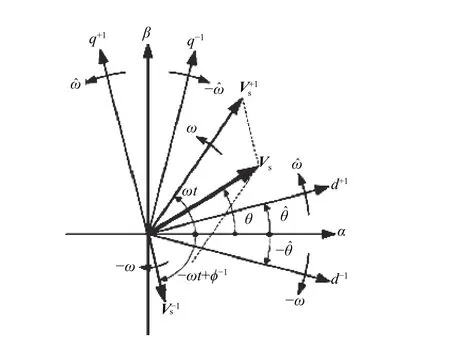
图6 电压矢量在双 Park 变换下的矢量分解图Fig. 6 Vector exploded diagram of voltage vector under double park transformation


利用线性化的式(10)对式(7)和(8)进行简化,得到正负时序分量值为
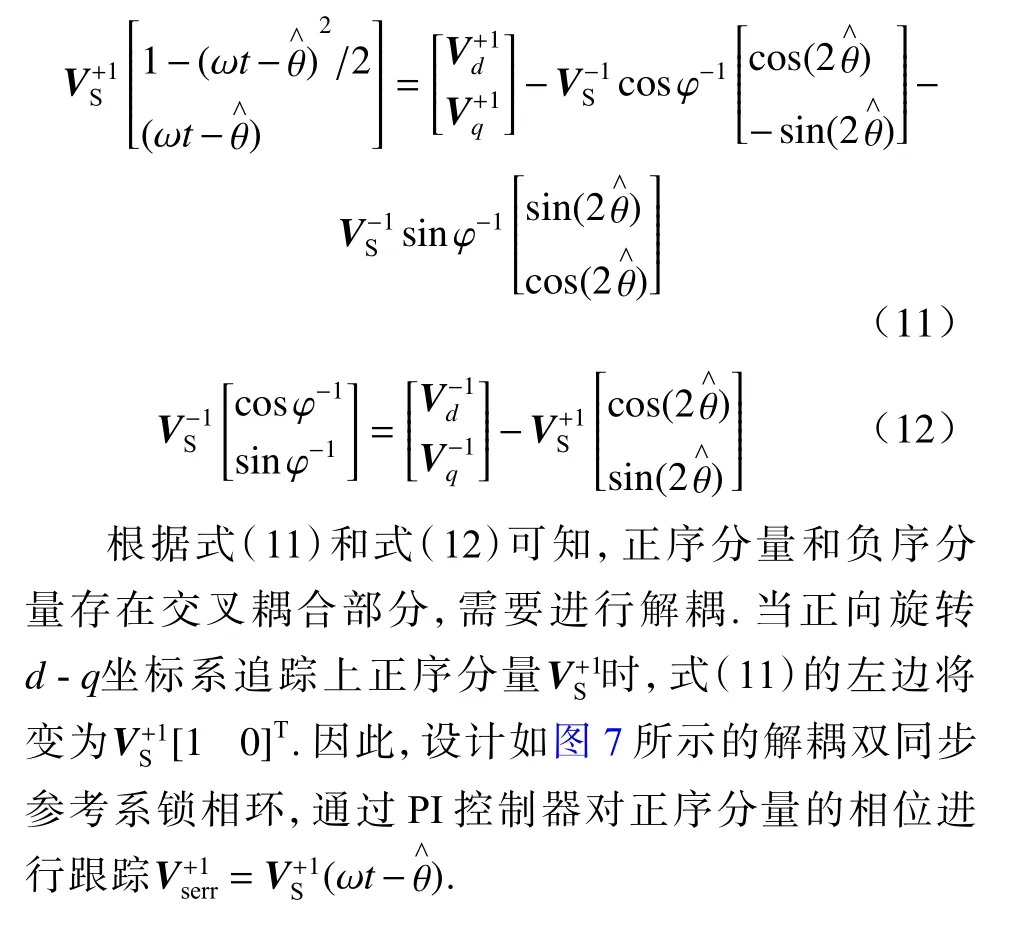
由于图7展示的解耦双同步锁相环相位跟踪技术在低速和启动时计算误差较大,本文为了提高相位跟踪器的响应速度,将霍尔信号作为跟踪器的前馈信号,对实际的电气位置进行闭环观测. 整个计算过程如图8所示,其中Hallabc表示霍尔传感器获取的6个转子位置信号.
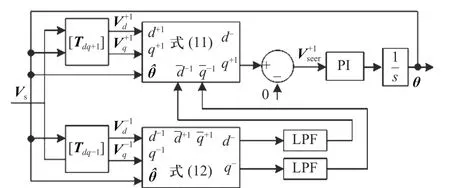
图7 解耦双同步参考系锁相环Fig. 7 Phase-locked loop in the decoupled dual synchronous reference
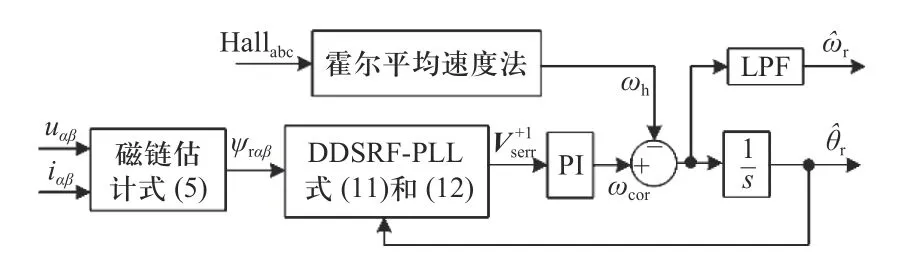
图8 带有霍尔前馈的解耦双同步参考系锁相环Fig. 8 Decoupling dual synchronous reference system phase-locked loop with Hall feedforward
霍尔前馈信号可以精确获取6个边沿的角度位置,通过平均转速法[17-18]对实际的电气位置进行粗略估算,用作整个电气角度估计算法的前馈信息. 结合闭环的DDSRF-PLL方法实现对增程器发电机电气位置的精准位置估计.
2.2 电网锁相环控制
并网后的增程器控制器后可以利用电网给电池充电或者反向馈电. 整个过程采用矢量控制方法对电力整流进行控制. 最为关键的是需要在整流与逆变过程精准获取电网的三相电相位角度. 本项研究采用上文提到的DDSRF-PLL方式对电网相位进行锁相追踪. 具体实现方式如图9所示.
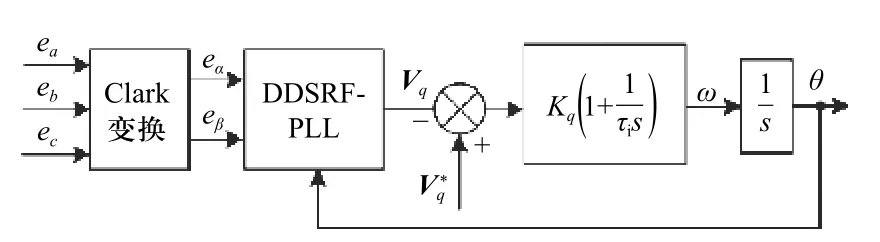
图9 基于DDSRF-PLL技术的电网相位追踪Fig. 9 Power grid phase tracking based on DDSRF-PLL technology
电网的三相电压通过降功率的电压三相传感器采样得到,经过Clark变换以后得到静态两相的电压值,利用DDSRF-PLL锁相环技术实现电网q轴电压的系统输出,并且利用PI控制器对q值电压进行闭环调节,得到系统的电角速度,最后对电角速度积分得到实际的电网相位角度.
3 增程器参数优化与模式控制
3.1 增程器控制参数优化
本文采用最常用的CD-CS型最优曲线功率跟随策略[19]对增程系统的工作特性进行控制. 当动力电池电量足够高的时候采取CD模式,汽车的动力需求由动力电池提供,增程器此时不工作. 当动力电池较低或整车的功率需求大于动力电池的额定放电功率时,增程器进入CS模式,发动机工作在效率最优曲线上,输出功率在一定范围内跟随整车的功率需求.

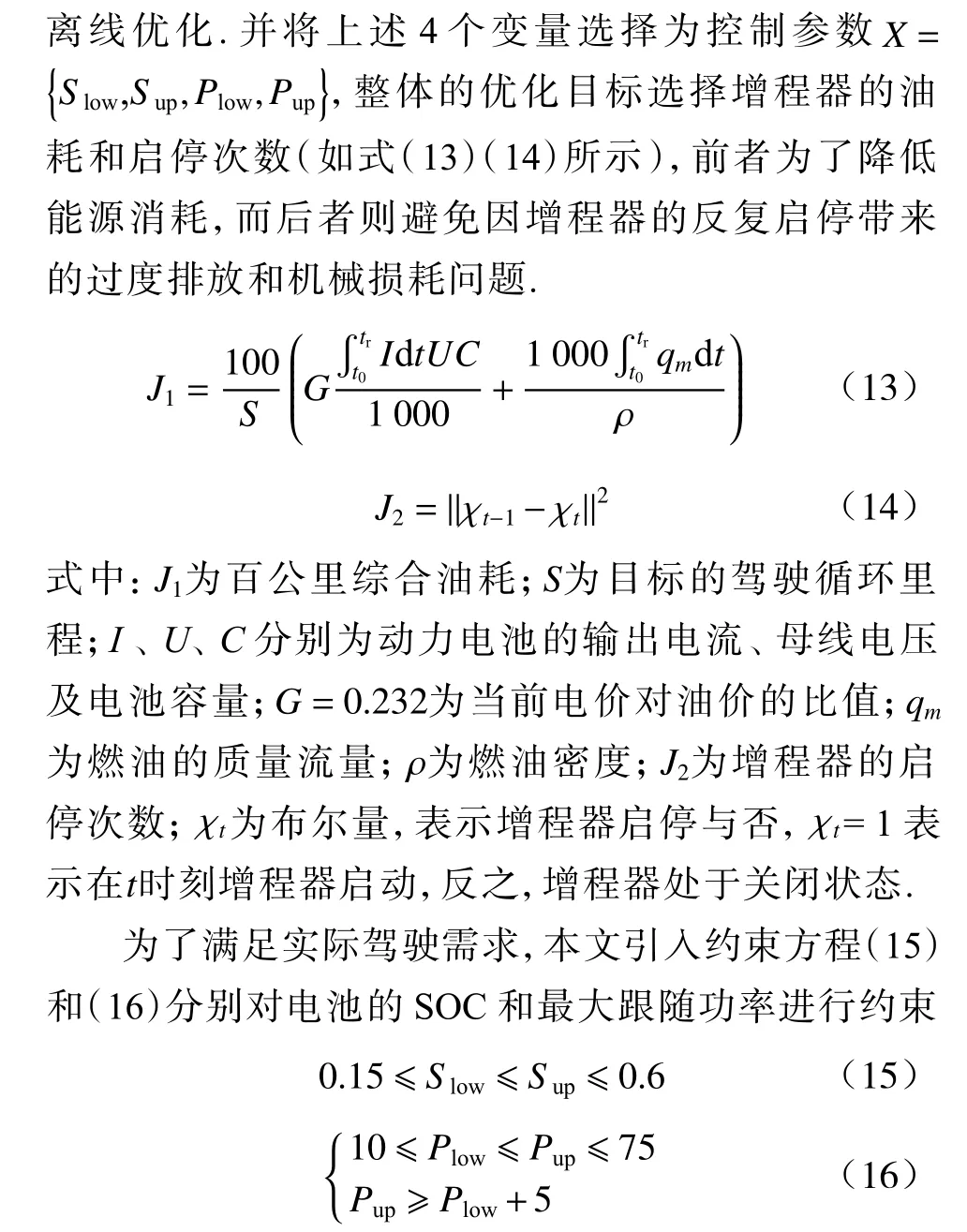
至此,增程器的控制参数优化转变为一个带有约束的多目标优化问题,如式(17)所示

为了快速求解该问题,本文引入具有最大差异性的NSGA-II算法对其求解,具体的算法流程可参见之前的研究[20]. 基于此方法,具有双目标权衡方案的帕累托前沿求解如图10所示. 为了权衡所有非支配解,本文采用TOPSIS方法[21]在众多的帕累托前言中选择最优的决策点如图10所示. 最终,选择的最优控制参数为Xopt={20.2,50.5,6.8,48.8}.
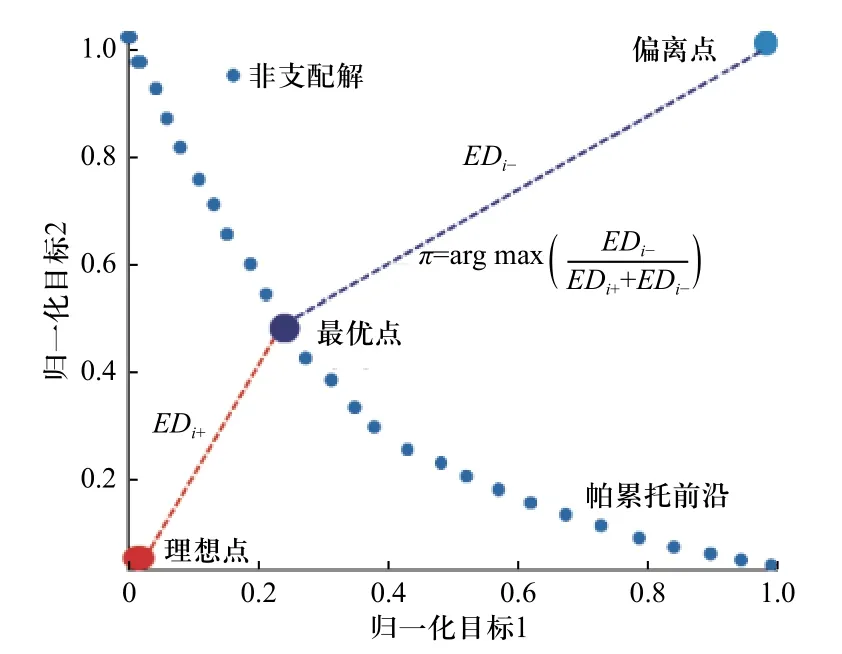
图10 帕累托前沿及 TOPSIS 决策方法Fig. 10 Pareto frontier and TOPSIS decision method
3.2 增程器启动与工况点切换策略
增程器的启动到发电需要进行热机和工况点切换,所以明确整个系统的能量优化以后需要制定相关的启动与工况点切换策略[22].
考虑到增程器的启动转速较低,且发电机可以提供很大的启动转矩,因此采取发电机预先启动增程器,拖动发动机工作在怠速模式. 发电机工作在恒转速模式,目标转速设为700 r/min,发动机ECU点火启动. 当发动机开始输出转矩并与电机一起加速时,电机改切换为恒转矩模式. 待发动机稳定运行一段时间后,电机采取逐步降载的方式停止工作,如图11所示. 图中的卸载起始时间通过试验测定为t0=10,t1=40.

图11 电机卸载方式Fig. 11 Motor unloading method
工况点的切换主要包括功率由高到低和由低到高2种情况. 在低功率点向高功率点切换时,切换策略保证切换过程尽量平稳减少转速波动,需要电机协调工作. 如发动机由怠速点向既定工况点切换时,此时电机的输出转矩为0,发动机需要采用转速闭环来调节油门值将发动机转速升高至预定工作点附近,然后电机以斜坡加载方式逐步加载反向电磁转矩至转矩目标值,为发动机调节油门维持转速稳定留出更多的时间,同时防止发动机负载突变带来的转速波动.
相反地,增程器由高功率点向低功率点切换时,首先电机开始在700 r/min工况处(如图中Te点负载)卸载,发动机油门位置转速稳定,电机卸载结束以后发动机将目标转速调整为低功率点的转速值,完成功率点的连续切换.
4 试验结果与讨论
为了验证提出的带有V2G功能的增程系统,本文搭建了具有发动机、电机及并网设备的增程系统试验平台,如图12所示. 本文在此基础上进行了电气位置估计算法对比实验、并网发电试验、模式切换与控制策略验证试验等.

图12 增程器试验平台Fig. 12 Range extender test platform
4.1 试验台架描述
增程器的整体逻辑连接如图13所示. 系统的主体由发动机及其同轴的发电机及其控制器组成. 增程器控制器负责与下游的电机控制器和发动机控制器通信,进行策略的执行与验证. 同时,增程器控制器通过TCP协议与上位机的监测软件通信,用于实时获取数据并传达指令等. 电机控制器需要完成逆变和并网发电功能. 考虑到动力电池的母线电压为350 V,无法直接与电网并网,需要在电机控制器与电网之间加装变压器,将控制器输出的交流电升压后与电网连接.
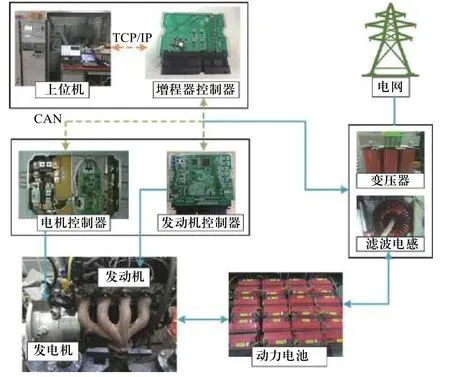
图13 增程器逻辑连接图Fig. 13 Logic connection diagram of the range-extender
4.2 电气位置估计与并网试验验证
4.2.1 电气位置估计算法验证
为了验证电气位置估计算法的准确性,本文选择了500 r/min带载20 N·m的工况进行试验,结果如图14所示,其中,本文选择平均差值法[14]与本文提出的DDSRF-PLL算法作比较.

图14 电气角度结果对比Fig. 14 Comparison of electrical angle results
由图可知,平均转速法在估算位置的时候,会累积较大的误差,该现象在扇区切换时刻尤为明显,电气位置会出现明显的跳变过程,这对电机的平稳转矩控制会有很大的影响. 平均转速方法最大值为15.2°,平均误差高达5.51°. 作为对比,所提出的DDSRFPLL方法最大误差仅为5.1°,平均误差仅为1.48°.
电机的d-q轴电流和A相电流的变化情况如图15所示. 可以看出,传统的平均转速方法控制的d轴电流偏差较大,这一点同样可以通过A相电流曲线发现:A相电流曲线在扇区切换点具有明显的尖峰. 同时与平均转速法相比较,本文使用的DDSRF-PLL方法估计的转子位置更为连续准确,且三相电流更为正弦.
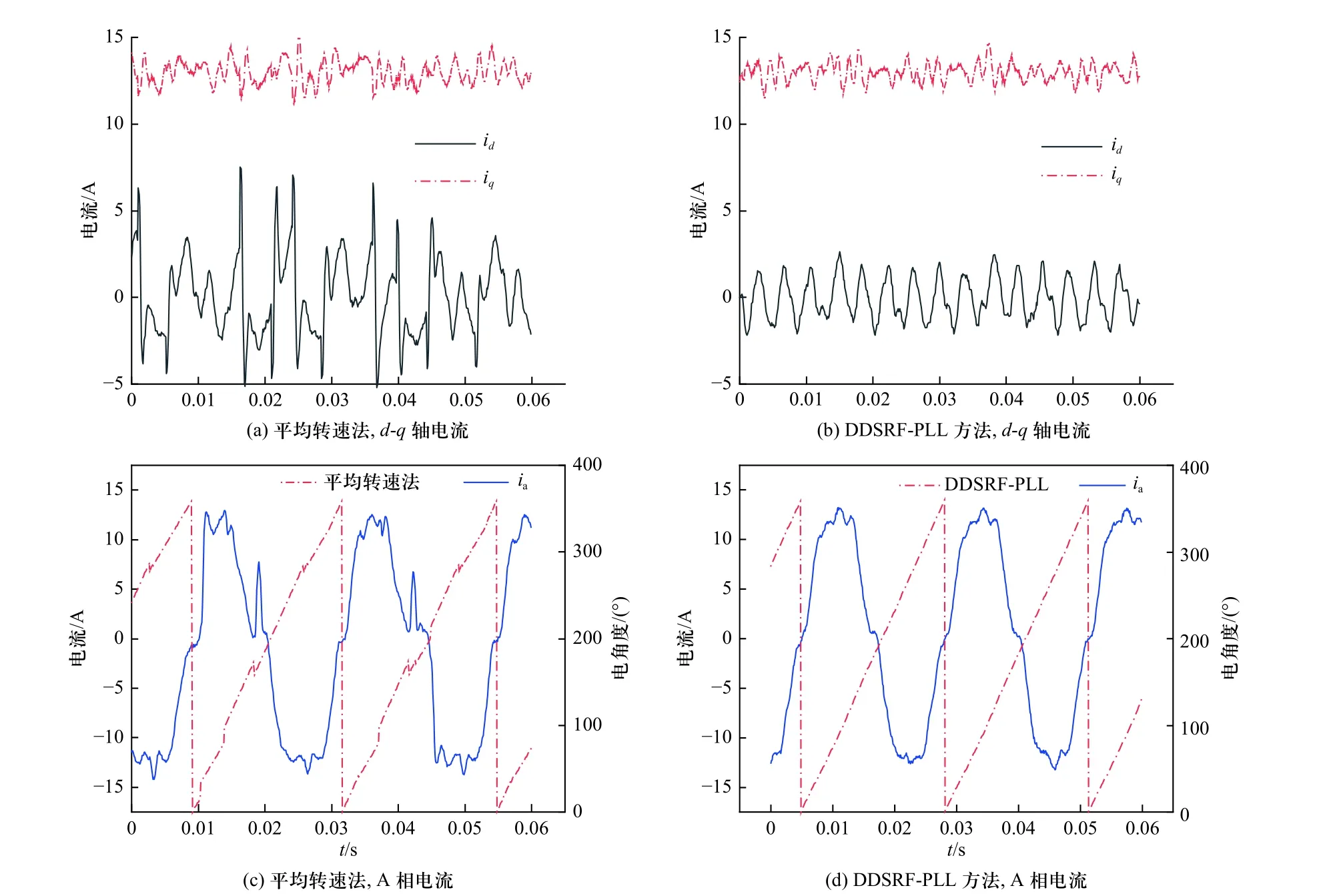
图15 d-q 轴电流曲线与 A 相电流曲线Fig. 15 d-q axis current curve and A phase current curve
4.2.2 并网功能验证
图16展示了电网锁相环的相位追踪情况. 可以发现,电网锁相环算法可以成功地追踪到电网的电流变化相位:电网的A相电压的过0点与锁相环追踪的电网0相位相吻合,表明此时增程器可自主地向电网进行馈电.

图16 电网A相电压与相角度Fig. 16 Grid A phase voltage and phase angle
并网实验测量得到的电网电压信号和电流波形信号如图17所示. 图中并网A相电流和电网A相电压信号相位重合表明锁相环已经成功地捕捉到电网相位. 电网A相电压和B相电压二者相位差为120°,且注入电网的B相电流信号为正弦等幅振荡曲线,表明增程器实现了功率因数为1的并网控制.
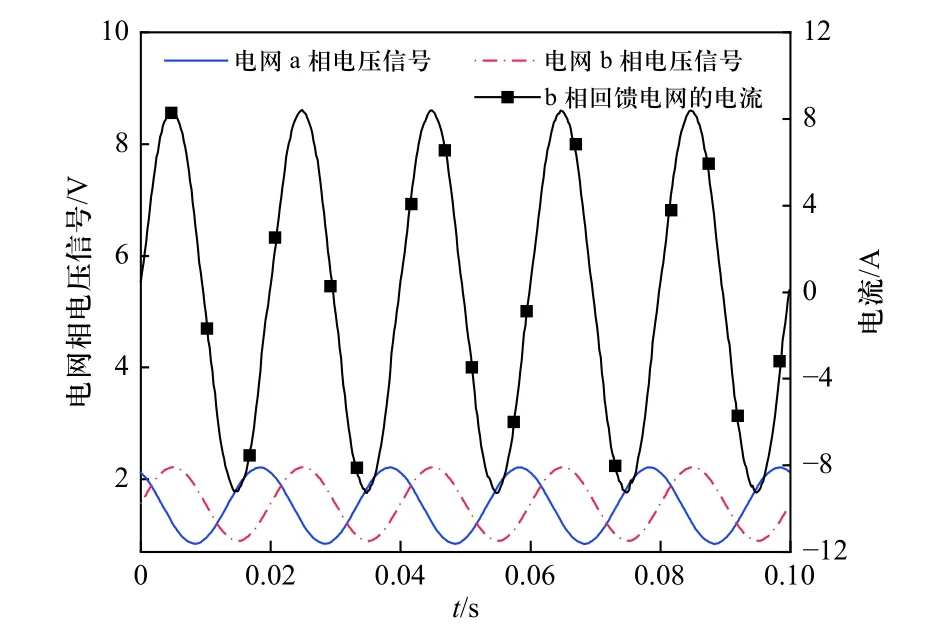
图17 并网相电压与馈网相电流曲线Fig. 17 Grid-connected phase voltage and feeder phase current curve
4.2.3 工况切换与定工况发电验证
增程器的启动试验和工况切换及定工况发电试验结果如图18图19所示. 增程器的启动过程如图18所示,首先电机拖动发动机至怠速点800 r/min附近,发动机在5 s以内点火并怠速,至40 s时电机逐步卸载,增程器启动完成,此时的转速闭环由发动机单独控制,转速波动稍有增加. 图19展示了增程器由怠速(800 r/min)工况切换至发电工况点(12 kW)的过程曲线. 首先发动机进行转速闭环控制将实际转速提升至目标转速(1 750 r/min)附近,维持一段时间以后开始提高发电功率表至目标值附近. 在45 s过后发电机转矩为-65 N.m, 此时增程器的发电功率约为12 kW.
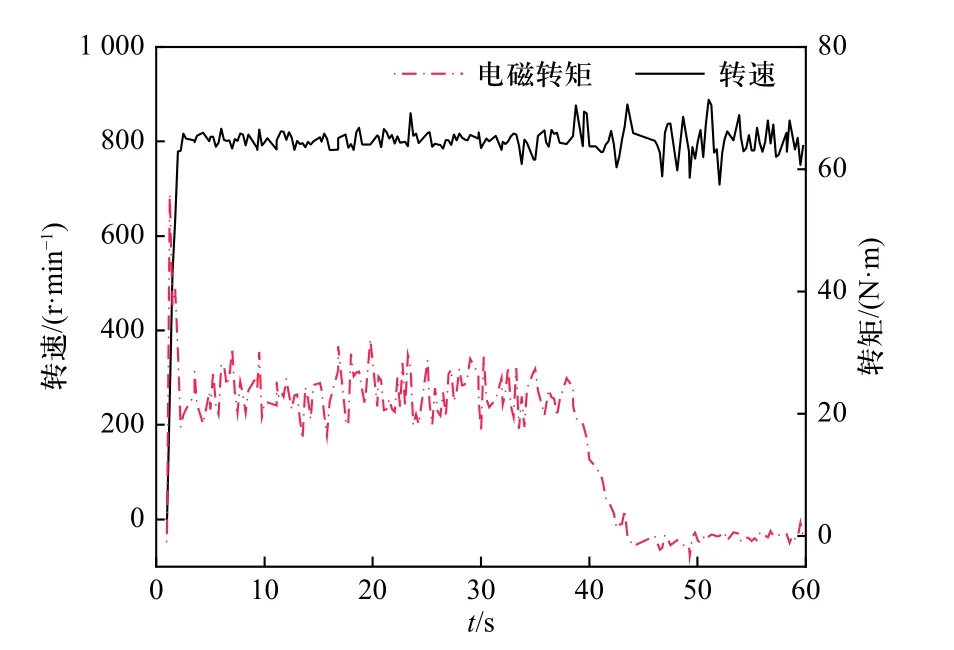
图18 增程器启动过程Fig. 18 Range extender startup process
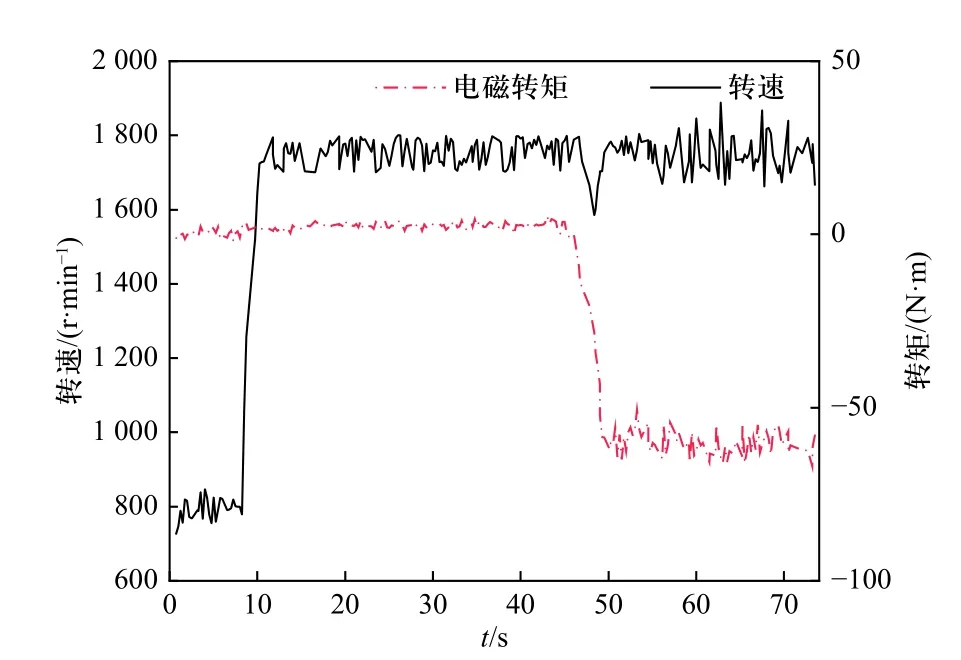
图19 增程器发电工况切换过程Fig. 19 Power generation mode switching process of the range extender
5 结 论
本文对具有V2G功能的增程式混合动力系统进行了建模、优化和试验验证. 首先根据发动机的万有特性曲线和增程器的功率需求确定了最优发电曲线.然后利用多目标优化的方法优化了功率跟随控制策略并确定了最佳的电池SOC和峰值功率等优化变量. 此外,为了实现低成本的增程器发电控制,本文提出了基于DDSRF-PLL算法的电气位置估算方法,并且在此基础上实现了增程器的并网发电控制. 最后本文对所提出的控制策略和并网发电功能进行了试验验证. 主要结论如下:
①本文提出的电气位置估算算法比传统的平均转速方法平均误差缩小29.6%,d轴电流幅值波动缩小近50%,相电流的总谐波失真降为原来的50.3%.
②并网试验验证了增程器控制器能实现增程器电气位置和电网相位的锁相跟踪,并且能够自主完成增程器并网功能.
③增程器启动和工况切换结果表明提出的增程器协调切换策略可以保证增程器的动态工况切换平稳,且自适应地跟踪发电功率需求.
