氢泄漏光学检测技术综述
2022-03-15苗扬
苗 扬
(1.北京工业大学材料与制造学部, 北京 100124; 2.北京工业大学先进制造技术北京市重点实验室, 北京 100124)
社会进步和经济发展对新能源有迫切需求,氢能无疑代表着未来能源的发展方向[1],且已经成为航天发动机、新能源航空器及汽车[2]的燃料. 自2015年巴黎气候变化会议以来,氢能作为清洁能源,已经成为所有发达国家和许多发展中国家的发展战略. 我国制定了碳中和战略目标,国家发改委颁布的《“十四五”循环经济发展规划》中,氢能源利用是循环经济关键技术与装备创新等五大重点工程重要内容之一[3]. 由于氢具有高燃烧值、高燃速度、低点火能的特性[4],任何涉及氢能系统泄漏都可能引起燃烧爆炸,造成重大的灾难事故. 因此,从技术层面上讲,快速、准确、安全的泄漏检测是氢能源发展的最根本保障. 对于氢泄漏检测的传感器,安全上都有许多严格的规定. 然而,大多用于氢检测的传感元件[5],只有置于氢环境中,才能使其某些物理性能发生变化. 因此这类接触式传感器件,不适应复杂的测量环境. 光学检测具有非接触、无损伤的特性,已经成为氢泄漏检测的主要研究方向. 光学检测技术从原理上可分为两大类:第1类是根据光谱学原理建立起来的检测方法,包括拉曼光谱[6]、红外吸收光谱[7-8]等光谱技术,这类技术中,成功且具有发展潜力的是可调谐半导体激光吸收光谱技术(tunable diode laser absorption spectroscopy, TDLAS)[9-11];第2类是用金属或合金为传感材料制成的光纤传感器[12],现有的传感材料中,金属Pd最为普遍,且传感效果最好[13]. 本文论述了氢泄漏光学检测包括TDLAS技术和钯基光纤传感技术. TDLAS技术中,介绍了激光波长扫描和调制、光谱吸收、背景吸收谱的影响、目标气体指纹谱选择、二次谐波信号获取及气体浓度测量等内容. 为了对测量仪器及测量过程有直观的了解,给出了自主研制的智能型TDLAS氧气浓度检测仪的样机结构、模块单元、测试过程和测试结果. 钯基光纤传感技术中,作为基础,首先简单介绍钯氢系统的传感原理及性能. 然后系统介绍各种类型光纤传感器及发展过程,并简要讨论传感器宏观性能与微观机理.
1 TDLAS气体检测技术
1981年,美国科学家Reid等[14]首次提出二次谐波TDLAS技术并用于测量痕量气体的浓度. 该技术利用半导体激光器输出波长可调谐的特点,利用目标气体的吸收光谱,检测透射光的二次谐波分量,实现气体浓度的测量. 随着半导体激光器和信号处理技术的进步,TDLAS技术日趋成熟,现已广泛用于H2O、CO2、CH4、NH3、CO等多种气体的监测[15-20],国内有中科院半导体所、合肥光机所、哈尔滨工业大学、浙江大学、北京工业大学等单位从事该领域研究. TDLAS技术具有非接触、选择性强、灵敏度高、响应速度快等优点.
TDLAS技术中多用分布反馈式(distributed feedback laser, DFB)半导体激光器. 半导体材料主要有锑化镓、砷化镓、磷化铟、硫化锌等. 由于这种激光器内置了布拉格光栅,因此输出线宽非常窄,单色性和稳定性极高,通过工作温度和电流大小可以实现波长调谐. 国内外能够提供DFB半导体激光器的商家非常多,国外一些著名的光学产品供应商都可以提供,国内中科院半导体所、中航光电、西安炬光、江苏天元、武汉锐科等单位也可以提供. 但是成熟的DFB半导体激光器芯片技术基本上由美国、德国、日本等发达国家垄断,能够完整生产的厂家主要有美国Thorlabs公司、德国 Nanoplus 和Eagleyard公司、日本NTT公司等. 大部分供应商提供的DFB半导体激光器主要是基于对上述几家芯片的封装生产,以满足用户的不同应用需求.
1.1 测量原理
TDLAS测量系统主要包括可调谐半导体激光光源系统、待测气体吸收池和光电转换及信号处理系统三大部分.
可调谐激光器:测量系统所用光源为半导体激光器,具有波长可调谐的特点. 如图1所示,半导体激光器输入受注入电流和半导体制冷器(thermo electric cooler,TEC)影响. 当半导体激光器工作介质确定后,输出波长随工作温度和注入电流变化. 工作温度每改变1 ℃,输出波长大约改变0.1 nm. 注入电流每改变1 mA,激光波长大约改变0.01 nm. 通常采用TEC来控制半导体激光器的工作温度,并使温度起伏小于0.1 ℃. 当工作温度选定后,激光器输出波长可以通过注入电流大小的变化来调谐. 技术上正是通过注入电流调制激光器的输出频率取得了突破,才使得TDLAS技术成为可能. 激光器的注入电流由一个低频锯齿波和一个高频正弦波(其频率为f)叠加后形成高频调制信号. 低频锯齿波信号在一个周期内由小到大变化. 由于激光频率与注入电流大小有关,因此激光输出频率在特征频率附近扫描,所以锯齿波也称之为扫描波. 当扫描电流上叠加高频调制信号后,激光器输出频率受高频信号的调制. 假定输出激光的瞬时频率为ν(t),则有
ν(t)=ν0+δνcos(ωt)
(1)
式中:ν0为中心频率(即只受锯齿波信号后输出的激光频率);δν为频率调制幅度;ω为调制角频率.

图1 TDLAS测量系统Fig.1 Measurement system based on TDLAS
由此可见,TDLAS技术所用的半导体激光器,首先通过选用激光介质和工作温度使输出的激光波长确定在待测气体特征峰位置,然后通过注入电流调谐激光输出波长,激光器输出波长在待测气体特征峰附近扫描,并受高频调制信号调制.
吸收定律:Beer-Lambert定律是吸收光谱法测量气体浓度的理论基础.当频率为ν,强度为Io的准直激光束通过待测气体,且激光频率与气体的特征谱重叠,激光被气体吸收,输出光强度减小.若It表示输出光强度,则输入、输出光强度满足
It=Ioexp [-pS(T)φ(ν)cL]
(2)
式中:p为待测气体分压强;S(T)为吸收谱线强度,与温度T有关;φ(ν)为吸收谱线线型,线型函数与温度、总压强、气体中各成分含量有关;c为气体浓度;L为吸收光程.这一关系称之为Beer-Lambert定律.令α(ν)=pS(T)φ(ν)cL,定义为吸收率函数.
二次谐波分量:透射光经光电转换器转换为电信号,获取电信号中二次谐波分量是信息处理系统的关键.根据Beer-Lambert定律,激光束经过待测气体后的相对光强度与吸收率函数α(ν)成指数关系,即It/Io=exp[-α(ν)].由于激光输出频率调制,即ν=ν0+δνcos(ωt),因此相对光强度是调制幅度δv和调制频率ω的函数.根据傅里叶级数,相对光强度可表示为
(3)
式中:k为傅里叶级数的阶次;H0、Hk为傅里叶级数的系数.二次谐波法的本质是提取k=2的分量.可以证明,当气体浓度较低时,傅里叶级数的前3项为:Idc=Io(ν)、Iω=Io(ν)δν、I2ω=Io(ν)α0A2cL,分别代表输出信号中的直流分量、一次波分量和二次谐波分量.直流分量仅与激光输出强度有关,一次波分量与激光输出调制幅度有关,二次谐波分量表达式中Io(ν)、αo、L分别为激光输出强度、气体吸收系数、吸收光程,A2与傅里叶系数有关,当频率给定,这4个量均为常数.由此可见,二次谐波信号的大小与气体浓度成正比.
线型函数与算法:当透射光通过光电转换成电信号后,根据傅里叶级数,信号可以表示为傅里叶级数,根据傅里叶级数展开式,二阶分量的系数A2与频率ν有关,二阶分量系数随ν的变化关系称之为分量信号的线型函数.在弱吸收条件下,由于吸收率函数α(ν)与吸收谱线型函数φ(ν)成正比,因此二阶分量信号的线型函数A2(ν)与谱线线型函数的关系φ(ν)[21]可以表示为
(4)
式中:νd=ν-ν0a,ν为激光输出的瞬时频率,ν0a为待测气体系数谱线的中心频率;φ(ν)为待测气体的线型函数;T=2π/(ωt)为时间.
由此可见,二次谐波信号的大小与待测气体吸收谱线线型有关,二次吸收谱线的线型与测量环境等因素有关.常用的线型函数有多普勒线型、洛伦兹线型、伏赫特线型等.实际测量中,根据测量条件设定不同的线型函数编制算法,采用数值计算的方法求解积分,来获取二次谐波函数的线型.
总体来讲,TDLAS测量中,高频调制的可调谐半导体激光束,经待测气体吸收后,用光电转换器将光信号转换为电信号;电信号经放大,再经带通滤波器获取二次谐波信号;二次谐波信号经锁相放大器放大后输出模拟二次谐波线型信号,并经模数转换器转换为数字信号;设定吸收谱线型函数,编制算法,计算二次谐波傅里叶系数,最后输出测量结果.
1.2 氢气TDLAS检测技术
虽然TDLAS技术能够很方便地测量许多气体浓度,但是,对于吸收系数很小的H2,近2年才有相关的报道[9],目前也只有挪威NEO公司能够生产检测H2的TDLAS测量仪. 在此之前,用光谱法测量H2浓度,人们只能用腔增强型激光光谱技术[22-25]. 这些光谱技术的共同特点是,都采用高反射率的反射镜,有效吸收光程可达几千米,超长的吸收光程能用来检测H2分子非常弱的四极跃迁. 但是,实际应用中,由于难以获得高纯度试样,腔内污染经常导致传感器灵敏度下降,甚至腔内反射镜完全损伤.
红外吸收谱特点:H2分子红外区吸收谱线非常少,也非常弱. 图2为高分辨光谱数据库中H2分子的红外吸收谱线图[26]. 由于H2是同核双原子分子,无电偶极矢量,因此红外吸收谱中无电偶极振动吸收谱. 由图2中可以看出,波长1 900~3 000 nm内有多条吸收谱线,这些谱线对应H2分子电四极基频跃迁. 波长1 100~1 500 nm的谱线,是H2分子四极跃迁的二倍频泛频吸收峰,前面提到的腔增强光谱法,就是利用这些泛频吸收谱线,用红外光谱吸收法实现浓度的测量. 还可以看出,波长2 400 nm的基频吸收线附近,有少数几条非常弱的转动吸收线.

图2 氢分子红外吸收光谱Fig.2 Infrared absorption spectrum of hydrogen molecule
指纹谱选择:H2分子多条吸收特征谱中选择哪一条作为测量用谱线呢?根据指纹谱选择原则,必须保证该谱线有一定的吸收强度,同时该谱线应该位于环境气体的光窗区. 由图2的吸收谱可见,H2分子有3条较强的红外吸收基频谱线,分别为2 407 nm(4 155.3 cm-1)、2 223 nm (4 497.8 cm-1) 和2 122 nm (4 712.9 cm-1). 这3条线中,最适合选用的特征线是2 122 nm(4 712.9 cm-1). 虽然这条线幅值不算最强,但它却不受其他环境气体吸收谱线的影响. 图3 给出了2 000~2 500 nm区间其他环境气体的吸收谱,环境气体包括H2O、CO2、CH4、NH3、CO等气体. 为了对比,不同的气体,采用不同的体积分数,H2O和CO2的体积分数为1%,而CH4、NH3、CO的体积分数为0.1%. 中间的插图为H2分子2 122 nm附近的吸收谱,由于H2分子吸收强度太小,为了对比,将其放大1 000倍. 由中间插图清楚地看到,这个区间除了CO几条非常弱的吸收线外,再没有其他环境气体的吸收线. 而且,在这个区间,H2分子的2 122 nm吸收线吸收最强. 而H2分子其他2条特征线,受环境气体的干扰非常大. 这也就是说,H2分子2 122 nm(4 712.9 cm-1)线,位于环境气体的透射光窗区,环境气体干扰最小,所以选择该谱线作为探测的指纹谱线.

图3 环境气体的透射光窗及指纹谱线的选择Fig.3 Selection of transmission optical window and fingerprint spectral line of ambient gas
可调谐激光源:当2 122 nm(4 712.9 cm-1)谱线选作为H2分子的指纹谱后,由于近年才有了波长在2 122 nm附近的可调谐半导体激光器,因而才实现了TDLAS检测H2. 据报道,挪威NEO公司激光生产的氢气激光检测仪中,半导体激光器采用了德国Nanoplus公司的分布反馈式半导体激光器[27]. 激光器输出波长在2 122 nm附近,输出功率5 mW,工作温度稳定在30 ℃,阈值电流70 mA,扫描电流幅值10 mA,扫描频率150 Hz,波长扫描区间0.4 cm-1,能覆盖H2的2 122 nm指纹谱宽度. 调制电流幅度2 mA,调制频率100 kHz.
1.3 基于TDLAS的氧气智能检测仪
先进的TDLAS技术发展速度非常快,已经有非常多的产品问世,图4为2种商用的甲烷、氨气泄漏检测仪. TDLAS检测仪不仅能够很容易监测如CH4、CO2等吸收强度大的气体,而且也能检测吸收系数很小的H2. 不同的检测对象,特征谱不同. 近红外区检测不同气体时,对应的半导体激光器的输出特征波长如表1所示.

图4 商用CH4、NH3泄漏TDLAS检测仪Fig.4 Commercial TDLAS detector for methane and ammonia leakage
虽然TDLAS技术的原理是普适的,但是对于不同的检测气体,由于吸收系数、光窗位置和应用环境不同,必须考虑检测仪器的灵敏度、交叉影响、环境噪声、稳定性等具体参数,例如由于H2分子四极吸收系数太小,迄今为止国内还没有见到自主研制的TDLAS氢气检测仪. TDLAS技术的快速发展,不仅能够很容易监测如CH4、CO2等吸收强度大的气体,而且也能检测吸收系数很小的H2. 但是目前为止,

表1 TDLAS中检测各类气体的半导体激光器特征波长
国内还没有见到自主研制的TDLAS氢气检测仪. 为了服务碳中和战略,实现H2泄漏安全监测,同时为了填补TDLAS氢气检测的空白,计划在已经成功研制TDLAS氧气智能检测仪的基础上,开展用TDLAS技术对H2泄漏的检测. 作为同一技术的不同应用对象,下面简要介绍自主研制的TDLAS氧气智能检测仪. 目的使读者对TDALS技术有更直观的了解,同时也是对下一步开展TDLAS氢泄漏检测技术路线的论证.
O2光谱吸收系数虽然比H2的吸收系数大,但相对其他气体仍然较小,用TDLAS技术监测O2浓度的研究也比较少. 在应用领域,O2浓度测量有很大的需求. 例如,在航空领域,飞机燃油箱中O2浓度的超标可能会带来灾难性后果[28-29],为此,美国联邦航空局规定海拔3 048 m以内燃油箱O2体积分数不超过12%;3 048~12 192 m不超过14.5%,并要求对燃油箱惰化,以减小O2浓度[30-31]. 根据飞机油箱惰化需求及O2浓度测量安全性要求,基于TDLAS原理,研制了适合飞机油箱O2浓度检测的智能检测仪.
检测仪结构:根据航空要求,研制的飞机燃油油箱氧气智能检测仪具有体积小、质量轻、精度高、安全可靠的特点. 检测仪样机如图5所示,其中,图5(a)机载检测仪样机外形照片,下部黑色器件为气室. 为了适应飞机油箱检测需求,气室与主机分离. 且测量仪体积小、质量轻、精度高、耐燃油蒸气,带有液晶温度显示面板实时显示温度. O2体积分数测量范围2%~30%,测量精度≤0.1%. 图5(b)为主机电路模块,该模块包括2个单元:左侧部分为激光发射单元,包括半导体激光器和驱动电路、温度控制器、光电转换器;右侧为信号处理单元,包括放大器、滤波器、锁相放大器等. 半导体激光器选用筱晓(上海)光子技术有限公司的蝶形封装DFB激光管(DFB-760-01-40-TO5-PD),中心波长760 nm,输出功率20~40 mW. 附带注入电流驱动器,TEC温度控制器和PD转换器, 工作温度为20~80 ℃. 温度控制器、锯齿波扫描信号发生器、正弦波调制信号发生器、激光器驱动电路等所用的芯片已标注在图5(b)中. 激光器阈值电流40 mA,锯齿波幅值5 mA,调制波波幅2 mA. 锯齿波频率16 Hz,正弦调制波频率15 kHz.

图5 航空智能氧气测量仪Fig.5 Aviation intelligent oxygen measuring instrument
气室:为减小体积和提高测量灵敏度,气室采用Herriott型光学多通增强吸收池. 图6为检测仪的气室,其中图6(a)为气室的外形照片,左端为输入、输出光纤,几何尺寸为126 mm×34 mm×34 mm,留有测量样气输入、输出口. 光路原理如图6(b)所示. 两端为高反射率的反射镜,反射镜谱宽450 nm~20 μm,反射镜留有通光小孔,激光束在2个反射镜面之间的反射次数为38次,反射光斑分布为圆形,激光束最后经出射孔耦合到输出光纤. 这种增强型吸收池,虽然几何长度很短,但光程可达2.5 m.

图6 气室原理样机Fig.6 Chamber prototype
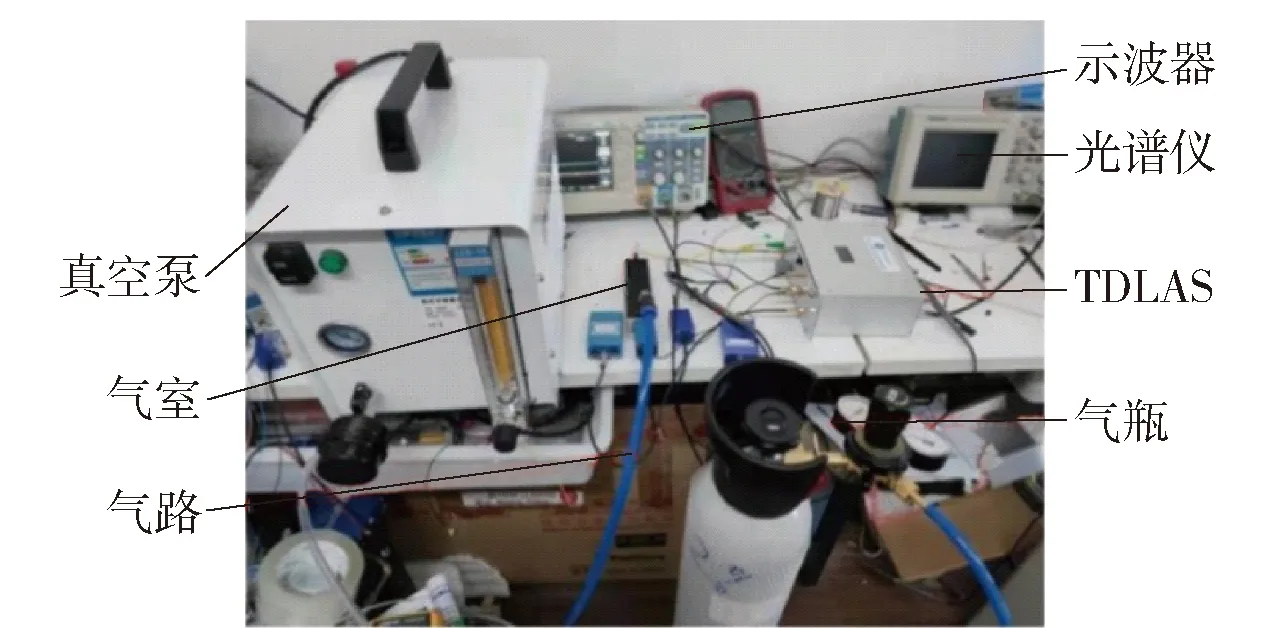
图7 TDLAS氧气浓度智能检测仪实验测试系统Fig.7 Rxperimental test system of TDLAS oxygen intelligent instrument
光电转换与信号处理:弱信号检测和处理是测量仪的重要组成部分,信号处理主要包括模拟信号处理和数字信号处理. 模拟信号处理包括前置放大,差分放大,滤波和锁相放大. 光电转换器选用Thorlabs公司生产的铟镓砷(InGaAs)光电二极管. 二极管的感光面直径为3 mm,中心响应波长为760 nm,谱宽能够覆盖激光器的调谐范围;由于光电探测器探测到的信号比较微弱,因此信号处理单元中设置前置放大电路,前置放大器采用0P07芯片;信号处理单元设置差分放大电路,取部分激光信号作为参考,再与气室吸收后的信号光差分. 差分放大的目的是消除背景噪声;经过前置放大和差分放大后的信号,再经带通滤波器获取二次谐波信号;二次谐波信号作为相敏检波器(phase sensitive detection,PSD)的输入,相敏检波器的参考信号采用正弦调制波的二倍频信号. 参考信号和二次谐波信号经过PSD后,得到幅度更大的二次谐波信号,然后再经过低通滤波器(low pass filter, LPF)后,可以有效去除噪声. 锁相放大器输出的二次谐波信号再经模数转换供数值计算. 本测量仪中数据采集卡为USB- 1602, USB主控采用CYPRESS公司的CY68013A芯片.
实验测试及结果:测试系统如图7所示. 测试前用真空泵清空气室,同时用示波器和光谱仪观察注入电流信号和测量激光器的光谱. 测试时,按系统要求连接好电路、气路、光路. 标准气瓶安装真空阀和减压阀,连接气路软管,气室预抽真空,用减压阀调节气瓶出口压力,分别按照0.1、0.3、0.5、0.8、1.0 MPa的压力通入空气、和不同体积分数的O2. 用N2作载气,O2体积分数分别为9.5%、6.5%和2%. 测试过程中,更换气瓶时,先将减压阀内残存气体排出后再接入测试管路,待示值稳定后保存测试数据,每次测试时间10 min. 在更换不同浓度的气瓶时,观察响应时间,并做记录. 计算每一浓度测量值的均值、均值与实际值的最大偏差. 测试结果如表2所示.

表2 耐燃油蒸气O2浓度测试结果
测试样气分别为空气以及O2体积分数分别为9.5%、6.5%和2.0%的气体,其中空气约定实际值为20.947%,各样气的O2体积分数实际值分别为9.495%、6.493%和1.887%,样气真值的不确定量为0.200%.
2 金属Pd传感原理及Pd-H2系统的热力学特性
氢泄漏传感检测技术研究最多的,是用金属或合金作为传感材料制成各种光纤传感器. 已经报道的传感材料有Pd、Pt、SiGe、金属氧化物等. 这些材料中,由于Pd对H2的吸附能力强,溶解度高,因而其性能最好,研究也最深入[5,32]. 作为光纤传感器的基础,本节将介绍将Pd对H2的传感机理和Pd-H2系统热力学特性.
2.1 Pd-H2相互作用
H原子在金属晶格中的溶解:金属Pd属面心立方晶体,因为其对H2有高的亲和力和溶解度[33],所以对H2成为最好的传感材料. 它是最好的能够可逆装载、卸载H2的金属材料. 室温条件下,能够吸收自身体积900倍的H2[34],并能可逆地吸附和解附. 当Pd置于H2环境中,H2分子向Pd表面靠近,二者距离靠近到约一个分子大小时,受范德瓦耳斯力作用,H2分子势能达极小值,H2分子物理吸附在金属Pd表面. 由于二者相互作用,物理吸附在Pd表面的H2分子分解为H原子. H原子穿过Pd表面,在Pd的晶格内扩散,并溶解在Pd晶格间隙中.
H原子溶解引起金属晶体膨胀:金属晶格中溶解的H原子引起材料形变. Xie等[35]研究结果表明,H原子溶解度处于不同状态,引起晶格常数变化的大小不同. 室温时,α相晶格常数由0.389 0 nm变化到0.389 5 nm,变化率约为0.1%;β相的晶格常数由0.402 9 nm增加到4.033 0 nm,大约也增加0.1%. 而在α-β过渡相,晶格常数由0.389 5 nm增加到0.402 9 nm,变化率约为3.5%. 随温度增高,两相对应的晶格常数差越小. 晶格常数的变化,导致材料形变,形变的大小与晶格中H/Pd原子数比有关. 另外,晶体结构除了膨大外,可能有位错.
H原子的溶解引起材料其他物理性能的变化:H原子溶解,占据了Pd的晶格间隙,引起金属Pd的能带结构变化,从而影响材料的电学性能和光学性能. Weaver[36]与Mizusaki等[37]研究Pd吸附H2后能带结构的变化. 他们发现,H原子溶解在Pd的晶格间隙后,Pd的价带降低,态密度变化. 当H原子组分数(H/Pd原子数比)大于等于0.6时,费米能级的态密度大大减小. 由于能带结构的变化,改变了材料的电学和光学性质. Kumar等[38]与Raghu[39]报道Pd吸附氢后,其电子逸出功和材料的电导率变化. 逸出功随H原子的数目增多而降低,电导率随H原子的数目增多而增加. 正是由于钯晶格中H原子的浓度对材料的力学、电学、光学性质有较大影响,才使得它能成为高性能的传感材料.
纳米粒子的尺寸效应影响Pd的传感性能:金属Pd纳米粒子尺寸效应对氢传感性能的影响引起了研究者的很大兴趣. Bardhan等[40]与Baldi等[41]研究了Pd纳米粒子尺寸对H2分子的吸附及材料相变的影响. 与体相Pd相比,纳米粒子金属Pd与H2相互作用后,材料的热力学性质发生了很大的变化[42-43]. Griessen等[44]对纳米粒子Pd与H2的相互作用提出新的模型Silkin等用模拟计算,研究了体相金属Pd和纳米粒子Pd的介电系数. 他们发现:随Pd晶格中H原子浓度的增加,材料表面等离子体能量下降,共振波长红移. 对比纳米粒子Pd和体相Pd,虽然表面等离子体能量变化的趋势相同,但纳米材料的能量更低[45].
吸附和解附过程的相干性:Pd对H2具有吸附能力,同时也具有解附能力. 当H2环境移除后,溶解在Pd晶格中的H原子,发生解离,进而解附. 热平衡态下,Pd-H2反应过程可逆. Schwarz等[46]根据晶格结构的变化,分析了吸附和解附过程的相干性. 他们认为,吸附和解附过程中,晶格结构的变化存在相干变化和非相干变化. 相干变化过程时,晶格结构缓慢平稳;而非相干变过程中,两相晶格结构会出现突变. 他们对比体相Pd与纳米粒子Pd,认为体相Pd对H2的吸附和解附均是不相干的;而纳米粒子Pd对H2的吸附过程是相干的,解附过程是不相干的. Syrenova等[47]用带壳球核模型解释纳米粒子Pd的吸附和解附,认为H2吸附过程中,首先是在核心部位装载,当核心装满后,再在壳部位装载,2个部位的装载过程,相互约束,因此是相干的. 正是Pd-H2吸附与解附的可逆性,Pd基传感材料才可以重复使用;但吸附解附过程的差异,也限制传感的灵敏度.
2.2 Pd-H2系统的热力学特性
压力- 组成等温线图:热平衡状态下,用压力- 组成等温线来描述Pd-H2系统的热力学特性,如图8所示,也称之为P-C-T图[13,48]. P-C-T图可划分为3个部分,分别为α相、β相、α-β过渡相.当H2的分压较低时,材料处于α相,Pd晶格内H原子组分较低,晶格中H原子浓度随H2的分压增加而增加,当晶格中H/Pd原子比达到一定值αmax时,压强饱和.αmax的大小与温度有关,室温时αmax约为0.02[49].系统处于α相时,系统内只存在H2和Pd两种物质.随H2吸附过程继续进行,晶格内H/Pd原子比继续增大,但分压强几乎不变,出现压力平台.对应压力平台区间,α、β两相共存,或α-β过渡.当温度给定,压力平台高度几乎不变.在过渡相中,生成新的物质Pd/H,此时系统内有H2、Pd和Pd/H三种物质.本质上讲,β相对应的就是新生成的Pd/H.当H/Pd原子比达到βmin时,从α-β两相过渡结束.室温下,βmin约为0.57.当原子比超过βmin,系统完全处于β相.β相中,晶格中H原子浓度随H2分压的增加而增加.由P-C-T图还可以看出,过渡相压力平台的宽度,与系统温度有关,温度越高,压力平台宽度越窄.当温度达到一定值时,压力平台消失,此时的温度称之为临界温度.当H2分压为1.9 MPa,原子比为0.25时,临界温度为563 K.

图8 Pd-H2系统的压力- 组成等温线Fig.8 Pressure-composition isotherm diagram of Pd-H2 system
过渡相状态方程:对于α-β过渡相,即P-C-T图中的变压力平台区,用Vant Hoff方程来描述Pd-H2系统压强与温度关系.Vant Hoff 方程中用压强的对数与温度的倒数表述,二者呈线性关系,具体表述为
(5)
式中:p为分压;ΔH和ΔS分别为系统的焓和熵;T为绝对温度;R为气体常数.方程中直线的斜率与系统的焓变有关,截距与熵变有关.压强随温度的变化关系如图9所示(也称Vant Hoff图). 系统的熵变与Pd晶格中溶解的H原子多少有关,系统的焓变与生成稳定的H/Pd有关[33].

图9 Pd-H2系统压强随温度变化关系Fig.9 Variation of pressure with temperature for Pd-H2 system
迟滞效应:相变区间,金属Pd对H2的吸附和解附的路径不同,路径的差异称之为迟滞效应,如图10所示. 无论是吸附,还是解附,相变过程区间,压强只随原子比变化,与过程无关(见图7). 相变区系统吸附过程对应的压力平台与解附过程对应的压力平台的高度不等,吸附时的压力平台高于解附时的压力,如图10所示. 这说明,实际的相变过程是不可逆的. 迟滞大小,常用吸附和解附压强的对数比来表示. 存在迟滞效应,表明系统相变处于非平衡状态. 相变过程中,H原子必须渡越势垒,相变的方向不同,势垒高度不同[40-41]. 例如,氢化作用,引起材料应变,晶格尺寸变化,导致材料形变. 这种形变,本质上不可能是完全弹性的. 晶格的变化,也可能存在位错,位错引起的形变则完全为范性形变,是不可逆的. 再比如,相变过程中,晶格间隙中的H原子,不可能在解附过程中100%地移除. 系统的迟滞大小,与多种因素有关. Syrenova等[47]认为吸附与纳米粒子的尺度有关,而解附与粒子尺寸无关. 当粒子尺寸改变时,吸附过程中的热平衡压强影响迟滞间隙大小,迟滞间隙随纳米粒子尺度减小而减小[42-43,50],而解附过程中,热平衡压强不影响迟滞间隙变化. 总而言之,迟滞效应是一个相对复杂的问题,它也是影响传感灵敏度的主要因素之一.
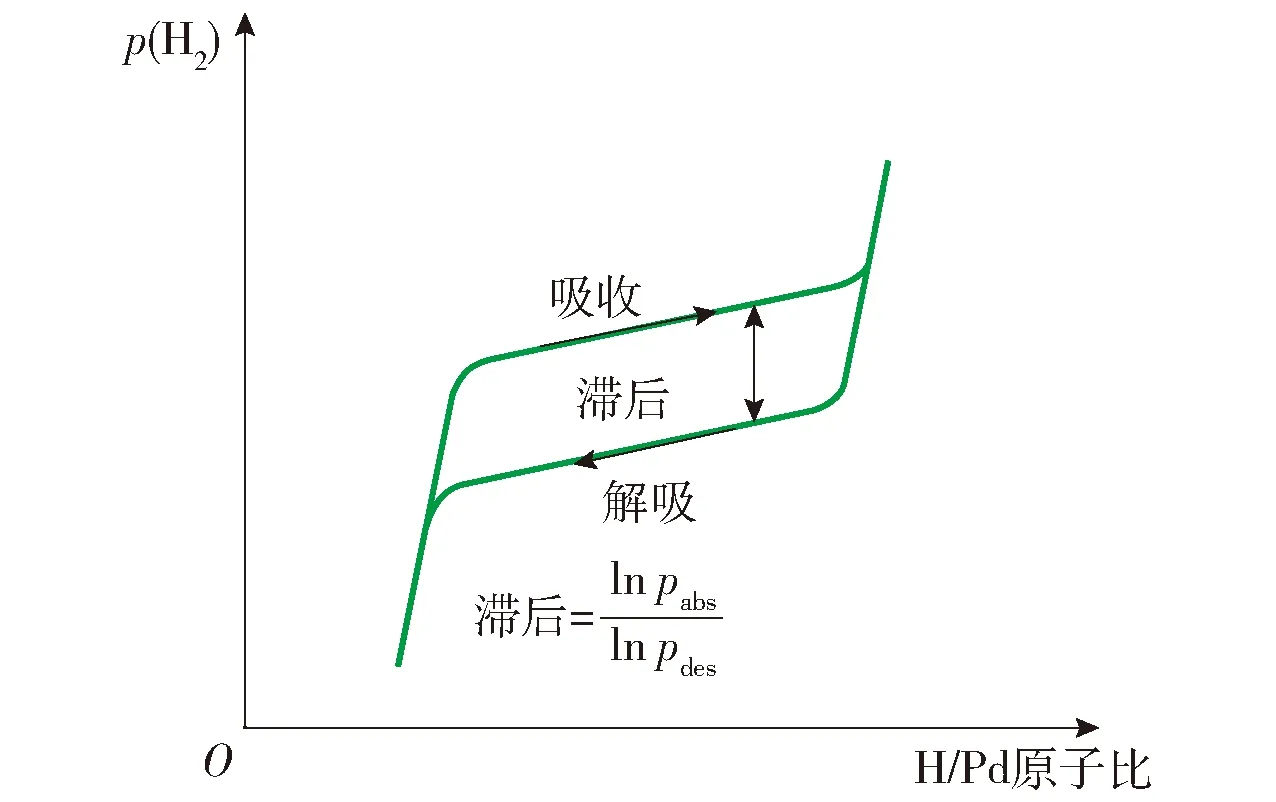
图10 Pd-H2系统的迟滞效应Fig.10 Hysteresis effect of Pd-H2 system
传感器性能参数:对于氢检测传感器,其性能参数备受关注. 这些参数主要包括响应时间、恢复时间、重复率、测量范围、测量灵敏度、测量极限等. 性能参数的定义,与常见各种仪器的对应参数相同. 这里只简单说明响应时间、恢复时间和重复率. 响应时间用来表征材料对H2吸附的快慢. 当材料置于氢环境中,吸附的H2达到饱和吸附的90%所需的时间定义为响应时间. 恢复时间用来表征材料对H2解附的快慢. 当H2环境移除后,解附的H2达到饱和吸附的90%所需时间定义为恢复时间. 重复率用来描述材料能够经受吸附- 解附循环次数.
3 Pd基光纤传感技术
以金属Pd为传感材料,以光纤为传输光路,根据Pd-H2相互作用对传输光的相位、强度、波长、偏振等参数影响的原理,制成不同类型的传感器,用于H2的检测.
3.1 干涉调制型光纤传感技术
由于Pd-H2相互作用,引起光纤中传输光相位度变化,进而以干涉条纹的移动标示待测H2的体积分数.
3.1.1 Butler传感器
1984年,Butler等[51]开发出首台用于氢泄漏检测的干涉型光纤传感器. 传感器光路结构如图11所示,类似Mach-Zehnder光纤干涉仪. 光路中由2根单模光纤组成,2根光纤剥去同样长度(3 cm)的包层,然后在剥去包层的位置上镀不同材料膜. 其中一根光纤先溅射10 nm厚的Ti膜,再溅射一层10 μm厚的Pd膜. 镀Ti是为了增加Pd与光纤之间的附着力;另一根光纤相应的位置上溅射一层Pt膜,目的是匹配2根光纤对温度的响应. 镀Pd膜的光纤用作传感光路,没有镀Pd的光纤作为参考光路. 为了防止机械振动的影响,2根光纤传感部位,紧密粘贴在一块石英平板上. 光源用0.5 mW的He-Ne激光器,激光分束后,分别经透镜聚焦导入光纤. 当光纤表面的Pd膜遇到H2,Pd膜膨胀,导致光纤拉伸,从而改变传输光的光程. 光程的改变,引起干涉仪干涉条纹的移动. 干涉仪输出端装有光电检转换器,用于检测干涉条纹的移动数. 条纹移动的个数,与待测H2体积分数有关.

图11 Butler光纤传感器示意Fig.11 Schematic diagram of Butler optical fiber sensor
实验时,采用Ar、N2和干空气等不同的载气. 结果表明:载体不同,响应时间不同,但均为几分钟的量级. 测量范围为:10-4%~3%. 1988年,他们改进了Pd膜的制造工艺[52],提高了测量精度. 图12为条纹移动与H2体积分数的变化关系,右边垂直的虚线为α相与过渡相的边界,直实线代表Sieverts定律所描述的理论值,曲实线代表Langmuir方程所描述的理论值,曲虚线为实验拟合值. 可以看出,当H2体积分数大于0.1%时,实验值符合Sieverts定律,这一区间条纹移动与H2体积分数基本呈线性关系. 也就是说,这一区间内,晶格常数增大量与H含量成正比;而H2体积分数较低时,实验结果与Sieverts定律偏差较大,说明低体积分数情况下,不能完全由体相溶解度来解释. 因为体积分数较低时,金属Pd表面捕获H2分子的能力较强,更多的分子吸附在Pd表面,所以与Langmuir方程吻合. 改进后的传感器灵敏度达到了10-6%.
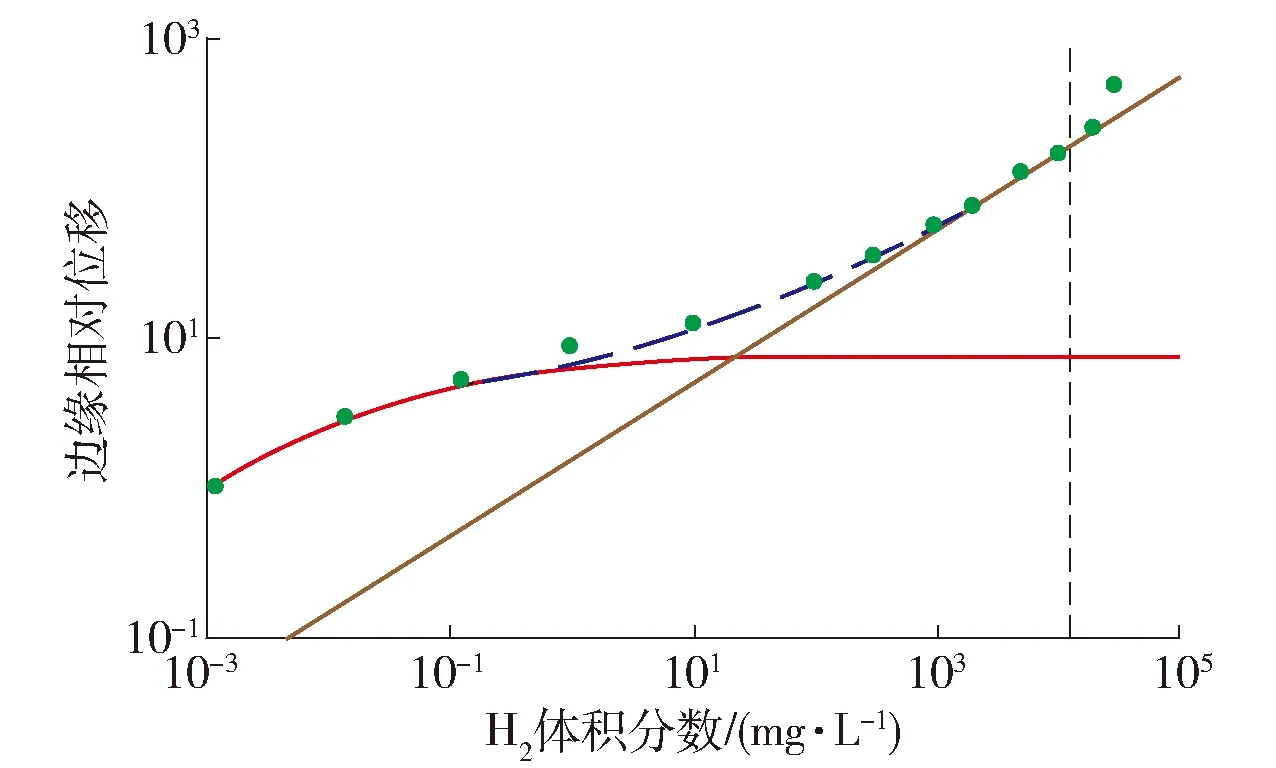
图12 干涉条纹随H2体积分数的变化关系Fig.12 Variation of interference fringes with hydrogen concentration
Pd的氢化导致材料应变,应变改变传输光的光程,引起条纹移动. 理论上讲,当光纤参数及边界条件给定,根据光弹方程,就可以得到光程变化量的解析关系. 这些内容,应属于弹性光学理论的专题研究,此处不再赘述.
3.1.2 Faralhi传感器
在Butler传感器中,传输光单次经过传感部位,所以传感部位对光的相位延迟相对较小. 为了增大相位延迟,1987年,有学者根据Michelson干涉原理研制出传感器,其结构如图13所示. 这种传感器,由于采用反射镜,传输光经2次过传感器传感部位. 光源为2 mW的He-Ne激光器,激光经分束后导入2根单模光纤. 光纤末端镀银,光束经镀银膜反射后沿原路反馈,反馈的2路光再经过光纤耦合器后叠加形成干涉条纹.他们将1根Pd线用速凝环氧树脂粘贴在1根光纤上,Pd线的长度和直径分别为6 cm和500 μm. 光纤的传感部位和对应的参考光纤置入气室中. 为了用差分法消除光路的相位漂移[53],参考光路采用强度调制. 调制的方法是将部分参考光纤缠绕在一个柱状的压电晶体上,当压电晶体输入电信号,输出光信号强度受驱动电压的调制,输出光调制频率等于电信号的频率. 与Butler传感器相比较,Faralhi传感器中的光信号不仅相位延迟可以增大1倍,而且可以消除测量噪声.

图13 Faralhi光纤传感器示意Fig.13 Schematic diagram of faralhi optical fiber sensor
0.1 MPa的N2载气实验,H2测量范围为0.005 4% (54 mg/L)~1.500 0%,响应时间为几分钟. 待测H2的压强分辨率为2 Pa,分辨率与系统热涨落有关.
3.1.3 Zeakes传感器
前2种干涉型传感器,其原理都是氢化导致金属Pd的膨胀,从而引起传输光的相位延迟. 事实上,光纤的应变不仅能引起传输光相位延迟,而且也会影响传输光偏振状态变化. 如果位相延迟属于测量信号,则偏振变化就属于测量噪声. 为了消除偏振等其他变化因素引起的噪声,1994年,Zeakes等[54]提出了一种光纤传感器,其结构如图14所示. 这种传感器,结构上类似法布里- 珀罗(Fabry-Perot)光纤干涉仪,简称F-P干涉仪. 他们用一根玻璃管,外表面溅射一层2 μm厚的Pd膜,分别由玻璃管2个端口插入1根多模光纤和1根单模光纤. 单模光纤同时作为光的输入和输出端,多模光纤端面镀高反射率的膜. 玻璃管内,多模光纤和单模光纤的2个端头之间距离为S. 因此,2根光纤的端头构成了F-P腔,腔长等于S. 单模光纤输入的激光束,经F-P腔振荡后,其反射光再经单模光纤输出. 原理上讲,当传感器置于氢环境中,氢化作用使玻璃管外层Pd膜膨胀,引起腔长S变化,从而导致F-P干涉仪输出条纹的变化. 传感器输出光强度为
(6)
式中:采用的光波长λ=1 300 nm;I0、I分别为系统输入、输出光强度;S为FP腔的腔长.因为腔长S的变化量与H2体积分数有关,所以通过干涉条纹变化的个数,能够获得H2体积分数的实验值.

图14 Zeakes传感器示意Fig.14 Schematic diagram of zeakes sensor
Zeakes用N2载气实验,分别获得了H2体积分数为0.5%和5.0%的实验数据,测得响应时间小于1 min. 由于这台F-P传感器Pd膜层较厚,重复使用率极差. 因此成型后就被搁置在一边了.
虽然Zeakes型光纤传感器灵敏度却非常高,但由于重复使用率差,问世后一直不受重视. 2007年,Innnuzzi等[55]提出了一种类似结构的传感,这类F-P腔型传感器又获得人们的青睐. Innnuzzi传感器依然是采用F-P腔,腔的一个端面仍然为单模光纤的端口,腔的另一反射端面是一根较长的悬臂梁,悬臂梁的反射面与单模光纤端口之间留有一定的距离S,即F-P腔长为S. 悬臂梁反射面先镀一层10 nm Cr膜,再镀上150 nm的Pd膜. 在单模光纤输出端附近再放置一根多模光纤的输入端口,用作接收信号的光纤. F-P腔振荡的光经悬臂背向散射,耦合到多模光纤的输入端. 接收光纤的另一端连接红外光电二极管,将接收的光信号转换为电信号后自动计数干涉条纹移动个数. 当传感器置于H2环境中,F-P腔长S受气体体积分数调制. 原理上讲,悬臂梁长度较长,氢化时引起腔长的变化较大,测量灵敏度应该更高. 但是,实验结果却令人失望. 他用Ar载气、H2体积分数为4%的样气实验,仅一次循环,传感器受损严重,性能急剧下降. 2007年,Maciak等[56]提出了另外一种结构的F-P型光纤传感器. 光纤端口处去掉包层,先后依次镀一定长度膜厚145 nm的TiO2膜和膜厚10 nm的Pd膜. 这种结构中,光纤/TiO2界面和光纤/Pd分别起到F-P两个腔面的作用,共振发生在2个腔面之间. 这个传感器中,钯膜的位置靠前,且厚度较小,所以氢的解吸性能好. Maciak认为,这种传感器中,TiO2膜不仅是干涉仪的谐振腔面,也是H2的传感面. 他们用空气作载气,实验得到测量范围为1.0%~3.5%,响应时间小于1 min. 当体积分数达2.0%时,传感器输出信号饱和. 传感器可重复使用.
3.2 强度调制型光纤传感技术
由于Pd-H2相互作用,引起光纤中传输光的强度变化,进而标示待测H2的体积分数.
3.2.1 微型反射镜面型传感器
1991年,Butler[57]研制了一种强度调制型光纤传感器. 这种传感器用微型反射镜作为传感面,其结构原理如图4、5所示. 多模光纤的1个端口镀Pd膜,膜厚为10 nm,膜面直径为125 μm. Pd膜一方面用作传感面,另一方面用作光反射面,如图15(a)所示. 光纤的另一个端口连接一个Y形耦合器,与另外2根光纤耦合. 其中一根用作输入光,与光源连接,另一根用作输出信号光,与光电转换器相连. 当传感器置于H2环境中,由于Pd-H2的相互作用,使Pd膜的反射率R(或透射率T)发生改变,反射率变化量与H2体积分数有关. 因此检测输出光强度的变化量,可获得H2体积分数的信息. 图15(b)(c)分别为实验上得到的反射率随时间的变化关系以及反射率随H2体积分数的变化关系. 可以看出,反射率随体积分数的增大而增大,不同体积分数下,响应时间不同. 特别重要的是,反射率的相对变化量随体积分数的变化关系与Pd的P-C-T图非常吻合,完全能够反映出压强平台. 说明用反射率变化的相对值能测试Pd2H的组分[58]. 这种类型的传感器,结构最为简单,性能也很稳定[59-60].

图15 微型反射镜传感结构及测试结果Fig.15 Structure and results of micro mirror
由实验结果可知,微型镜面的传感效果,取决Pd-H2相互作用对镜面反射率或透过率的影响程度. Garcia等[61]专门研究过Pd薄膜的光学透过率. 他们在玻璃衬底上镀一层Pd膜, 然后用光纤分别作为照明和接收光路,测量了不同厚度薄膜的光学透过率. Kalli等[62]研究了厚度在1~30 nm的Pd薄膜的光学反射. 他们对不同厚度的Pd膜,进行了单次和多次重复吸附/解附,表征不同循环次数下Pd膜从α相到β相的相变过程. 结果证明,反射率的变化与膜厚、膜结构、衬底性质等多种因素有关. Armgarth等[63]报道了膜面微结构对反射率(或透射率)的影响. 研究选取10~70 nm的不同厚度的Pd膜,观察发现,当Pd膜吸附H2分子,由于二者相互作用,膜面出现微气泡和微裂纹,这2种缺陷直接影响膜面的反射率. 他们还选取了膜厚超过100 nm厚型Pd膜,同样也发现膜面上存在微气泡和微裂纹. 对比薄型膜和厚型膜的这种微缺陷,结果表明:薄型膜吸附后出现微气泡和微裂纹,解附后膜面缺陷消失,也就是说,膜面缺陷是可逆的;而厚型膜的缺陷是永久的机械损伤,是不可逆的. 为了消除这种微缺陷,在光纤端面上镀一层1~2 nm厚的Ni膜,然后在Ni膜上面再镀Pd膜. 实验结果表明,镀Ni膜后,Ni/Pd膜的反射率减小,而且反射率缓慢变化区间的高度和宽度不同. Pd膜与包层的附着力影响膜面的微结构,从而影响传感性能. Pd在石英衬底上的附着力小于Ni衬底上的附着力,增大附着力可以消除膜面上的微气泡和微裂纹. Matelon等[64]的研究结果表明,衬底的性质明显影响传感器的响应时间. 他们制作的Pd/Si膜,最大响应时间为700 s,而制作的Pd/Al2O3膜,最大响应时间为3 700 s. 他们认为,表面粗糙度影响Pd亚表面的微结构,不同衬底,表面粗糙度不同,从而影响传感器的响应时间,新型金属/金属氢化物薄膜材料的光学透过率研究为Pd膜传感材料注入了新动力[65-66].
2006年,Kazemi等[67]研制了一种强度型光纤传感器,并将该传感器应用在美国斯坦尼斯(Stennis)航天中心四号发射架一次性运载火箭的发射测试中. 他们在制作微型反射镜传感面时,衬底采用多孔材料,这样金属Pd能够渗入衬底的多孔中. 多孔材料制作的Pd膜,重复率和可靠性均很好.
3.2.2 倏逝波型传感器
倏逝波型光纤传感器采用结构性光纤,在光纤表面镀膜,利用波导内光疏介质中光波的倏逝效应,实现对H2的传感.
1999年,Tabib-Azar等[68]根据光波导中的倏逝波效应,研制了一类传感器,结构如图16(b)所示. 他们选用多模光纤,纤芯直径50 μm,光纤剥去一小段(1.5 cm)包层,然后在剥去包层的位置镀Pd膜,膜厚10 nm. 光源用波长为650 nm的激光束. 用N2载气、H2体积分数变化范围为0.2%~0.6%的样气实验. 实验结果如图17所示. 其中图17(a)(b)分别为响应过程和信号强度随H2相对体积分数的变化. 由图可以看出,该传感器响应时间为30 s,传感器可以重复使用,恢复时间约为3 min. 同时残留气体对探测有延迟,延迟时间约20 s,透射光强度的通过率随体积分数增大而增加,但当体积分数增大到一定程度,出现饱和效应.

图16 Tabib Azar型光纤传感器示意Fig.16 Schematic diagram of tabib Azar optical fiber sensor
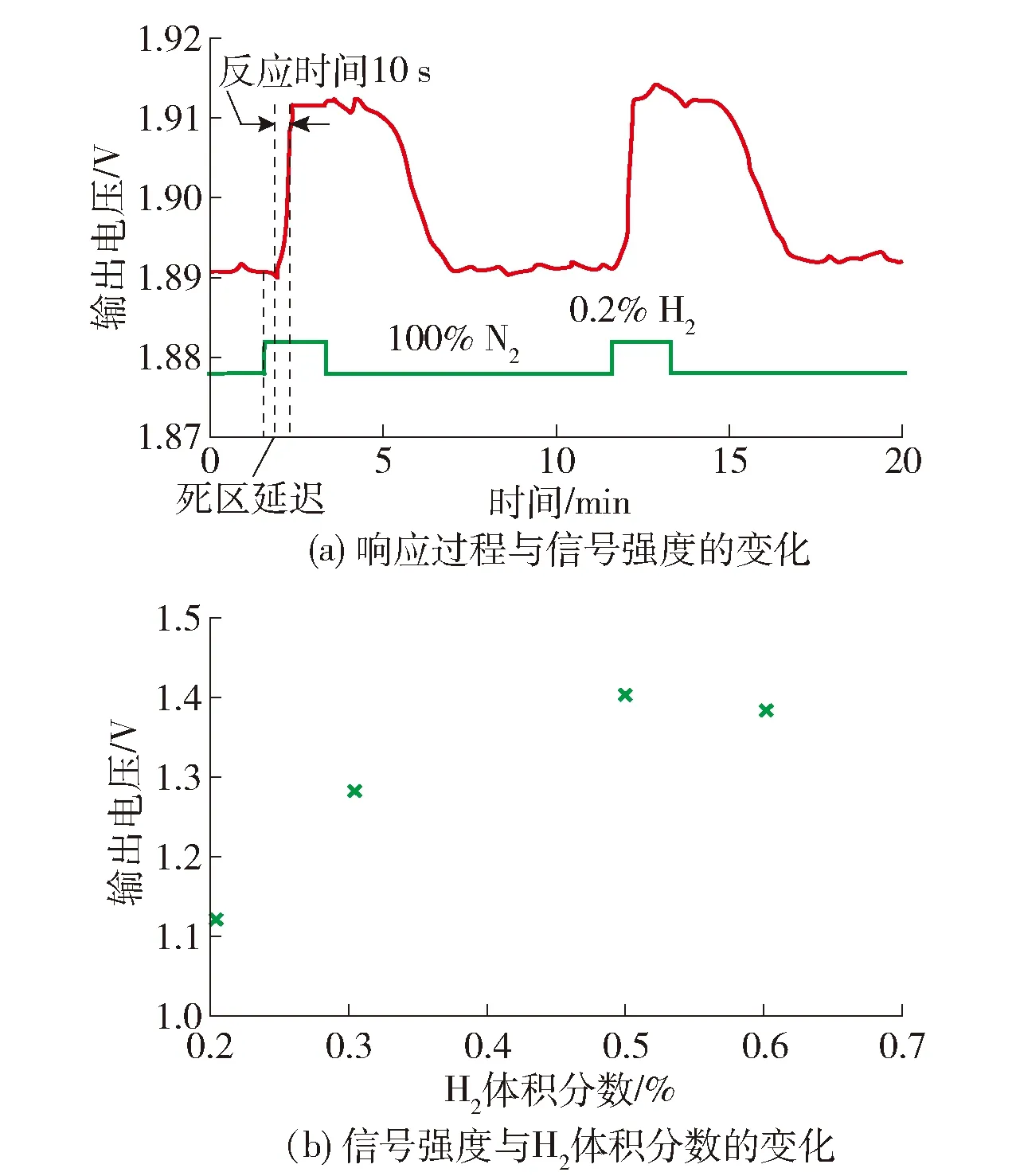
图17 Tabib Azar 传感器实验结果Fig.17 Experimental results of tabib Azar sensor
从物理角度讲,Pd-H2相互作用,可以引起材料介电系数变化. 当介电系数虚部减小时,材料的光吸收系数减小,透过光强度增大. 透过光的强度可以表示为
It=I0exp (-2rΔαL)
(7)
式中:I0表示无H2环境时的透射光强度;r为波导中倏逝波强度与总强度之比;r的大小与传感器结构有关.实验表明,r值变化范围很大,从百分之几到百分之几十.L为相互作用长度(Pd膜的长度),Δα为Pd膜吸收系数的变化量.当然,这类传感器,Pd-H2相互作用后,不仅会引起介电系数虚部变化,而且也会引起介电系数实部变化.介电系数实部的变化,导致传输光相位变化,这一点已经在相位型传感器中讲述过.
图16中还给出了几种类似的Tabib Azar光纤传感器,其中前2种结构最简单,后2种稍微复杂一些. 图16(c)用多模和单模光纤耦合,图16(d)用楔形光纤. 这类结构的传感器,也可以从数值孔径变化的角度来理解传感原理. 由于Pd-H2相互作用,改变了光纤的数值孔径,进而导致透射光的强度变化.
Villatoro等[69]对16(d)所示的楔形光纤传感器进行过较深入的研究. 他们的研究包括多模楔形光纤、单模楔形光纤[70-71]和纳米粒子楔形光纤[72]. 他们制作了膜厚12 nm、相互作用长度1.5 cm的单模楔形光纤传感器. 用Ar载气、H2体积分数变化范围为1.8%~10.0%的样气,测量了不同锥度的楔形传感器的光透过率与H2体积分数的变化关系. 他们发现,这种传感器不改变传输光的偏振特性. 他们还研究了单模楔形光纤色散效应,发现光波长在900~1 600 nm,传输光色散效应明显. Villatoro等[71]的实验结果还表明,虽然多模楔形光纤传感器的灵敏度比单模光纤低,但多模光纤传感器的稳定性和使用方便程度却要好得多. 他们还制作了膜厚15 nm、相互作用长度1 cm、楔形光纤腰斑直径30~70 μm的多个多模楔形光纤传感器. 光源用功率用20 μw,波长为850 nm的LED灯,测量Ar载气、H2体积分数变化范围0.3%~3.5%的样气,得到了不同锥度的楔形传感器的光透过率与H2体积分数的变化关系. 发现:Pd的氢化,传感器透射强度增大,但H2体积分数超过一定值后,光信号饱和. H2体积分数为2.0%时,响应时间为30 s,恢复时间为90 s;传感器重复使用后,响应时间和恢复时间分别为40 s和100 s,多次使用与第一次使用相比,响应时间和恢复时间都有所增加;他们还制作了膜厚4 nm,相互作用长度2 mm,腰斑直径为1 300 nm的纳米粒子楔形光纤. 光源波长1 550 nm的半导体激光,用Ar载气、H2体积分数范围0.8%~5.2%的样气,测量了光透过率与H2体积分数的变化关系. 与其他几类传感器正好相反,纳米粒子传感器光强度随H2体积分数的增加而减小. 楔形光纤传感器的优点在于腰部相互作用长度较短,传感灵敏,但同时由于结构特殊,容易造成腰部断裂[73].
2007年,Luna-Moreno等[74]根据光波倏逝效应,研制了一种结构性光纤传感器,这种传感器稳定性和灵敏度都比较高. 他们用长度为3~8 mm单模光纤小段,分别在光纤表面镀Pd膜和Pd合金膜,膜厚为10 nm. 然后将这镀膜厚的单模光纤小段夹在2个多模光纤之间,如图16(b)所示. 因为单模光纤纤芯的直径小于多模光纤的纤芯,所以光能够导入单模光纤的包层,单模光纤包层的光又能够耦合到传感膜层. 他们用Ar载气、H2体积分数范围0.8%~4.6%的样气实验. 结果表明透射光强度随H2体积分数增加而增大. 同年,Kim等[75]也研制了一种传感器. 他们将一段光纤嵌入一个石英槽内,石英槽曲率半径为50 cm. 再将嵌入光纤槽的光纤外露面抛光,抛光到光纤的包皮层剩余厚度为22 μm. 然后在抛光面镀Pd膜,膜厚分别为20、40、100 nm,相互作用长度为2.46 mm. 为了减小光纤传输过程中偏振的影响,光纤传感位置到光纤输出端距离仅为2 cm. 测试光波长为1 550 nm,用Ar载气、H2体积分数范围1%~2%的样气实验,测得传感器的响应时间和恢复时间分别为100 s和150 s. Barmenkov[76]报道过一种腔内氢传感的光纤激光器. 他把楔形光纤传感器的传感部位置入掺Er光纤激光器的谐振腔中. 由于Pd-H2相互作用,光纤吸收系数减小,激光腔损耗降低,导致阈值降低,脉冲积累时间减小. 因此可以通过测量脉冲积累时间宽度,来测量H2体积分数.
3.2.3 表面等离子共振型传感器
在光纤基底上镀Pd膜,光纤与Pd膜形成界面,界面上Pd的自由电子,在传输光波的作用下,能够形成电子密度变化的表面等离子波. 表面等离子体波沿界面传播,在垂直界面的方向上倏逝. 当光波的特征参数与表面等离子体波特征参数匹配时,产生共振效应,即表面等离子共振效应. 共振效应下,传输光强度出现明显的变化. 1998年,Bévenot等[60]首次根据表面等离子体共振的原理,研制出H2泄漏检测的表面等离子体共振光纤传感器. 他们用纤芯直径400 μm、数值孔径为0.48的多模光纤,剥去光纤2 cm长的包层,然后再镀Pd膜. 传感器的结构与Tabib-Azar传感器相似. 他们用波长670 nm的激光束,按一定的入射角导入光纤. 用Ar载气、H2体积分数范围从0.8%~100%的样气实验. 实验结果表明:透射光强度随H2体积分数增加而增大,变化规律P-C-T图吻合. 当H2体积分数范围为0.8%~1.0%时,变化范围处于α相;当H2体积分数范围为3.0%~100%时,变化范围处于β相;当H2体积分数范围为1.0%~3.0%时,变化范围处于α-β过渡区. H2体积分数100%时,响应时间在3~300 s之间变化. 为了改进传感效果,他们还将2个传感单元,先后串联在一根光纤上. 他们还发现,当光的入射角度大于光纤的数值孔径,依然能产生表面等离子共振. 当光的入射角度大于光纤的数值孔径,只有薄金属膜激发了表面等离子体. 这说明横磁模依然可以作为表面等离子体的激发源. 2009年,Buric等[77]专门研究了表面等离子体传感器的响应特性. 他们发现,表面等离子体共振效应,不仅可以发生在光纤与Pd膜的界面,而且也可以发生在Pd膜与空气的界面. 同样也发现了薄金属膜引起表面等离子体共振.
3.2.4 双折射型传感器
Pd的氢化,能够改变光纤的双折射特性. 1992年,Dessy等[78]利用这一原理,研制出一种氢传感器. 他们用一根单模双折射光纤,剥去一段包层,剥去包层的位置镀Pd膜,膜厚6 nm,制作好的光纤放置在金属护套内. Pd膜厚仅为6 nm,所以属于薄型膜. 由于采用双折射单模光纤,测量时,氢化反应释放的热量,引起光纤温度变化,温度变化引起光纤双折射性质的变化,导致光纤内2个正交偏振模的传播速度变化,这2个正交模输出耦合后,光的偏振态变化,经检偏器后,输出光强度变化. 本质上讲,这种传感器,原理不是因材料体积膨胀,而是由于热效应引起光纤双折射性质的变化. 他们用这种传感器测量了惰性载气,H2体积分数变化范围为1%~10%的样气的响应曲线. 测量得到H2体积分数为2.8%时,响应时间约1 min.
3.3 波长调制型光纤传感技术
给定结构的布拉格(Bragg)光栅光纤,其特征波长一定. 当Bragg光纤制成的传感器置于H2环境中,由于Pd-H2相互作用,光栅结构变化,导致Bragg波长移动,进而标示待测H2的浓度.
3.3.1 Sutapun传感器
1999年,Sutapun等[79]研制出Bragg光栅光纤传感器. 他们用纤芯5~10 μm、直径125 μm、Bragg波长为829.7 nm的单模光栅光纤. 在光学包层外面镀Pd膜,厚度为560 nm. 镀膜前,他们对光纤的包层进行刻蚀,包层剩余厚度为35 μm. 图18为光栅光纤传感器结构和测试结果图,其中图18(a)中,上图为传感器结构,中间为折射率分布,下图为透射和反射光谱响应图;图18(b)为波长偏移量对体积分数的响应曲线. 由于光纤中写入Bragg光栅,光纤折射率周期性变化,当宽谱光束传输时,透射光和反射光都会对波长选择. 将传感器置于氢环境中,由于Pd-H2相互作用,光纤拉伸,光栅常数和折射率都发生变化,从而导致Bragg波长的移动. 用惰性载气、H2体积分数变化范围0.3%~1.8%的样气进行实验. 不幸的是,他们的实验中,光纤拉伸引起的波长漂移非常小(小于0.1 nm),既是用高分辨的光谱仪(分辨率0.14 nm),也无法分辨这么小波长漂移量. 所以他们改用模拟计算的方法进行估算. 他们还发现,当测量体积分数为1.8%时,Pd膜有脱落,影响传感器重复使用. 为此,他们提出了在Pd膜与基底之间镀增固膜的方法,解决膜层脱落问题.

图18 Bragg光栅光纤传感器及其特性Fig.18 Bragg grating sensor and its features
3.3.2 光栅光纤传感器的改进
Sutapun等最初设计光栅光纤传感器时,只考虑对传输光波长的选择. 后来的研究发现,氢化作用的确使光栅常数发生了变化. 但是传感器对波长的选择,不仅仅只限于纤芯光栅常数的变化. 实际上,传输光与光导的耦合方式取决于多个界面,包括纤芯/包皮层、包皮层/Pd、Pd/外气层3个界面都会影响传输光波长漂移量. 利用多界面的耦合,能够实现更大的波长漂移. 根据这一原理,2006年,Wei等[80]用长周期光栅代替短周期光栅,研制出波长漂移量大的光栅光纤传感器. 这种传感器仍用单模光纤,纤芯为28 μm. 用溅射法在包层外表面镀Pd膜,厚度50 nm,膜面具有纳米尺度的颗粒. 他们用惰性载气测量了多种温度下,波长移动与H2体积分数的变化关系. 与Sutapun型传感器相比,该传感器波长移动量超过了2个量级.
4 结论
1) 尽管光学原理研制多种氢泄漏检测仪还存各自的局限性,但是光学检测技术具有灵敏度高、响应时间快、重复性好、稳定性高等优点,特别是从安全角度考虑,由于光学检测属于非接触无损检测,尤其适应易燃易爆的氢泄漏监测.
2) TDLAS技术利用激光谱线窄、强度高及半导体激光波长可调谐的特点,目标气体实现了可调谐激光吸收光谱技术,同时该技术在信号处理方面,主要针对透射光信号中的二次谐波信号以提高信噪比,实现微弱信号的检测. 半导体激光器和电子芯片的快速发展及商业化程度提高,为TDLAS技术的实用性、方便性、可靠性及低成本提供了保障.
3) 用TDLAS技术检测目标气体有2个必要条件:一是目标气体的指纹谱线处于环境气体的光窗区,且能达到检测响应的吸收强度;二是半导体激光输出波长扫描区间能够覆盖目标气体的指纹谱线宽. 对于指纹谱位于近红外的CH4、CO2、CO等气体,由于技术上容易满足必要条件,所以商业化检测设备发展程度较高. 但是对于H2而言,其2 122 nm的指纹谱吸收系数很小、环境气体噪声相对很大,且长期没有对应的半导体激光源,所以相应研究较少,检测设备国内目前仍处于空白. 氧气指纹谱线760 nm的吸收系数比氢气大,但比其他许多气体小得多. 针对飞机燃油油箱O2体积分数的测量,我们已经成功地研发出智能型TDLAS测量仪. 测量仪主机结构,光源驱动电路模块,微弱信号处理电路模块、气室构造、测试程序及测试过程等单元的设计,为进一步自主研制适应氢泄漏的TDLAS监测仪器储备了丰富的知识和工艺.
4) 以钯为代表的传感材料,与氢相互作用后,材料的物理性质发生相应的变化,变化的热力学规律有压力、等温线来描述. 传感器设计时,考虑传感材料与光纤耦合和光纤传输光路的结构,优化传感材料引起传输光特性的变化量,寻找传输光光束特性变化量与H2体积分数之间的变化关系,制成了适应不同测量要求的氢泄漏检测的光纤传感器. 尽管金属钯传感性能还有一些局限性,但迄今为止,仍被认为是对氢探测最好的传感材料,特别是把做成的各种薄膜. 并且钯基光纤传感器已经有了广泛的应用.
5) 虽然钯基光纤传感器形状和结构多种多样,但从传感材料对传输光特性影响的角度分类,主要有相位调制型、强度调制型和波长调制型3种类型. 3种类型分别以干涉条纹移动个数、传输光强度变化量和Bragg波长的漂移量来标示H2体积分数. 位相型传感器灵敏度最高,但测量噪声大,波长调制型波长漂移量较小,测量适应性不高. 3种类型的光纤传感器中,强度型传感器的稳定性、适应性,灵活性相对高,且成本低廉,因而研究最为深入,应用较为广泛.
6) 光纤传感器结构及传感机理是传感器研究的重要分支. 传感用的光纤有单模光纤、多模光纤、光栅光纤、结构型光纤等;传感材料结构有薄膜型、纳米粒子型、纳米线型、合金材料、多层薄膜等;传感材料基底有多孔材料、半导体材料、集体材料、聚合材料等;传感器几何结构有微型反射镜型、F-P腔镜型、长度型等. 从相互作用机理上有表面等离子体共振、倏逝波衰减、布拉格光栅共振、光学色散、双折射效应等.
7) 提高传感器性能是钯基传传感器研究的目的,主要包括:提高H2传感活性,拟制背景气体噪声,提高传感器灵敏度;研究热力学特性,调整传感器的测量范围,降低测量下限;增加传感材料结构的稳定性,提高传感器重复使用率;减小光纤中光传输的损耗,提高光的有效利用率;提高响应速度,减小测量时间;提高传感系统稳定性,适应高温、高压等特殊的测量环境;降低传感器成本.
