多对极发电机励磁绕组匝间短路故障在线定位系统研究与应用
2022-03-13夏自平王洪林阚朝晖郝亮亮
刘 英,夏自平,王洪林,王 光,阚朝晖,艾 澜,郝亮亮
(1.湖北白莲河抽水蓄能有限公司,湖北省武汉市 430000;2.南京南瑞继保电气有限公司,江苏省南京市 211102;3.北京交通大学电气工程学院,北京市海淀区 100044)
0 引言
励磁绕组匝间短路故障不仅会使发电机励磁电流增大、输出无功功率减小,还会导致机组振动加剧,影响系统的安全稳定运行。转子旋转中励磁绕组承受离心力造成绕组之间的相互挤压及移位变形、励磁绕组的热变形、通风不良造成的局部过热等是造成励磁绕组匝间短路的重要原因,这些原因引起的故障多在发电机运行时发生。利用发电机运行中的电气量实现对励磁绕组匝间短路故障的在线监测能够及时反映出突发性的严重短路故障,是近年来的研究热点[1,2]。
传统的励磁绕组匝间短路故障位置的查找采取分布电压法和冲击脉冲法等离线方式,有时需拔掉护环抽出转子,耗费巨大的人力、物力,停机检修时间较长。并且,由于实际运行中的动态短路往往随着转子静止而减轻或消失,离线方法无法实现动态短路的有效定位。汽轮发电机组一般采用微分线圈动测法实现励磁绕组动态匝间短路故障的定位,但是由于汽轮发电机组和水轮发电机组转子结构差异很大,该方法很难直接应用到水轮发电机组。
参考文献[4]和参考文献[5]分析了励磁绕组匝间短路时定子分支电流的变化特征,并据此提出了相应的匝间短路监测方法,参考文献[6]基于实验样机,构建了包括数学模型和在线定位依据在内的理论基础。本文在此基础上,提出了适合工程实际应用的故障定位方法,研制了励磁绕组匝间短路故障监测及定位系统,分析系统研制过程中的技术难点,并应用于白莲河抽水蓄能电站。通过现场实际应用及故障仿真数据进行分析,验证了该匝间故障定位系统的有效性和灵敏度。
1 励磁绕组匝间短路故障定位方法及实现
1.1 基本原理及实现方法
励磁绕组的匝间短路会造成励磁绕组各磁极下的结构出现差异,以某一磁极下的励磁绕组发生匝间短路为例进行分析。
单个磁极下的绕组发生匝间短路时,不考虑磁饱和,该磁极励磁磁动势可以看作是正常励磁回路产生的励磁磁动势和故障附加回路产生磁动势的叠加。根据参考文献[5]的分析结果,气隙磁场中由于匝间短路导致的附加磁通包括基波、奇数次及1/P、2/P(P为极对数)分数次谐波。附加磁通在定子绕组同相各分支感应出的分数次励磁电动势相位不同,因此在同相不同分支中感应出对应频率的谐波环流。其中,1/P分数次谐波频率与转子旋转的机械频率相同,即一个机械周期内定子谐波环流中1/P频率分量相位与每一个转子磁极的角度一一对应,因此可通过对1/P次谐波电流与转子旋转位置的时域对应关系进行分析计算,进而判断故障磁极位置。
根据定子分支电流实现转子匝间短路故障磁极定位的方法如下:首先设置转子旋转到某一设定位置为参考点,预设出该参考点下每个磁极的故障特征角。磁极故障特征角的意义为:磁极上的励磁绕组发生匝间短路故障时,转子旋转到参考点位置时定子分支1/P次谐波电流的相位角。不同磁极的故障相位角不相同。已知各磁极的故障特征角后,在实际系统中计算转子旋转到该参考点时刻定子分支1/P次谐波电流的相位角,与之最接近的故障特征角对应的磁极即为故障磁极。
励磁绕组匝间故障时定子分支的分数次谐波环流幅值与负荷电流相比通常要小很多,为提高故障量的计算精度,需要去掉分支中负荷电流分量。由于励磁绕组匝间短路只会引起定子相绕组内部不平衡分支电流,相电流只包括负荷电流,因此可以利用相电流采用不完全纵差电流的计算方法滤除分支电流中的负荷电流分量,并且对分支电流中匝间短路导致的分数次谐波分量的幅值及相位不会造成任何影响。不完全纵差计算方法如式(1)所示。

式中:id——不完全纵差差流;
ibr、iP——同相的分支电流、相电流;
kbr——分支系数。
1.2 系统设计方案
转子匝间故障定位系统如图 1所示,该系统由电流采集单元、键相采集单元和计算分析单元共同组成。电流采集单元用于采集发电机电流,分别从不同位置采集每一相的相电流和分支电流。键相采集单元用于确定参考点,由安装在定子侧的键相传感器和在安装在转子大轴上的键相齿盘共同组成。当键相传感器探头正对大轴上的键相齿盘时,传感器发出键相脉冲信号至故障定位系统,表示转子旋转到参考点。计算分析单元综合电流信号和键相信号实现故障磁极定位。
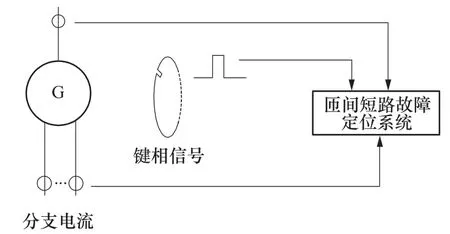
图1 匝间短路故障定位系统示意图Figure 1 Location system of inter-turn short circuits of field winding
匝间短路故障系统实现过程如图 2所示,系统在开始阶段首先计算各个磁极的故障特征角,然后实时采集电流模拟量,当接收到键相信号时,计算当前时刻1/P次谐波的相位角,根据相位计算结果和每个磁极的故障特征角进行对比并判断出故障磁极。

图2 故障定位流程图Figure 2 Location system of inter-turn short circuits of field winding
2 励磁绕组匝间短路故障定位关键技术
2.1 磁极故障特征角计算
实现励磁绕组匝间短路故障磁极定位首先需要确定每个磁极的故障特征角。磁极故障特征角与机组定子绕组形式[7,8]、线圈匝数、键相传感器安装位置等机组本体参数有关。故障磁极与故障电流的传递关系为:故障磁极→故障磁动势→故障电动势→故障电流。理论计算时,需要分别分析每一环节的相位关系,最后才能得到故障磁极和故障电流相位的对应关系。大型发电机组定转子绕组结构复杂,很难通过理论直接计算出匝间短路时参考点的谐波环流相位,因此,一般通过多回路等仿真方法计算参考点磁极的故障相位角。
不同磁极的故障特征角之间有一定的相互关系,如图 3所示,设1号磁极与定子分支绕组线圈中心对准时的位置为参考点。转子如图 3所示方向匀速旋转时,2、3、4号磁极的故障特征角滞后于1号磁极,且滞后角度与极对数有关。此外,考虑到相邻磁极极性相反,对应感应的特征电流相位也相反,设1号磁极故障特征角为θ1,其他磁极的故障特征角计算公式如下:

图3 故障特征角示意图Figure 3 Diagram of fault characteristic angle

式中:θN——N号磁极的故障特征角;
P——转子极对数。
抽水蓄能机组在发电工况和抽水工况时,转子旋转方向不同,当旋转方向与图 3所示方向不一致时,各磁极故障特征角也会发生变化,首先参考点故障磁极故障相位角与原旋转方向时相差180°,其次,其他非参考点磁极的故障相位角与参考点磁极故障相位角的超前滞后关系也与原来相反。因此反向旋转时故障相位角计算方法如式(3)所示。

除转子旋转方向对磁极故障特征角有影响外,大型发电机组的转子磁极极性也会定期倒换,磁极倒换时各磁极的故障特征角也需进行相应调整。
2.2 1/P次谐波电流相位计算
实现励磁绕组匝间短路故障定位需要计算出参考点位置1/P次谐波电流相位。不同磁极的故障特征角角度差为360°/(2P),极对数越多,对相位计算的准确度要求越高。相位计算误差过大时,就可能导致故障磁极定位出错。
影响1/P次谐波电流相位计算结果的因素主要是不完全差流中的其他频率分量。机组在没有故障的情况下,由于定子各相各分支不完全对称会导致出现工频分量差流;由于转子磁极的不完全对称会导致出现与极对数有关的分数次差流。发生励磁绕组匝间短路故障时,故障磁极导致的分支谐波环流中包括1/P、2/P等多种频率,故障定位仅需要1/P次谐波,1/P次谐波幅值相对于总的分支谐波环流分量要小一些。
通过上面分析可知,励磁绕组匝间短路故障时不完全差流中主要是1/P次谐波的整数倍次谐波以及工频分量。傅氏算法能够有效滤除整数次谐波,因此1/P次谐波相位计算可通过傅氏算法实现,计算方法如式(4)所示。根据实部和虚部即可求出相位。

式中:fs——采样频率;
fp——1/P次谐波频率;
ik——数据窗内电流采样值。
其中,k=1对应系统接收到键相信号的时刻。
3 仿真及现场数据分析
本文介绍的励磁绕组匝间故障定位系统应用于白莲河抽水蓄能电站2号机组。机组额定参数如下:发电功率PG=300MW,功率因数0.9;抽水功率PM=325MW,功率因数0.975,机端额定电压UN=15.75kV,定子绕组共有4个分支,转子极对数P=12。
3.1 故障仿真
由于无法实际模拟机组转子匝间短路故障,因此根据机组参数采用多回路方法搭建了数学模型,并通过模型对匝间短路故障进行模拟。
带载运行工况下单一磁极发生单匝金属性短路(短路电阻为0)时,单相相电流、分支电流以及不完全纵差差流的波形及其频谱分析结果如图4所示。

图4 励磁绕组单匝金属性短路波形及频谱分析Figure 4 Waveform and spectrum with single inter-turns short circuits fault
各次谐波有效值如表1所示。根据频谱分析及谐波有效值计算结果可知,单个磁极上发生匝间短路故障时相电流只有工频负荷电流,分支电流及不完全差流出现谐波分量(幅值较小),谐波主要是1/P次谐波及其整数次谐波,不同频率的谐波幅值有所差异,仿真结果与理论分析结果一致。谐波总有效值约为4.25×10-3p.u.,1/P次谐波有效值约为1.12×10-3p.u.。单个磁极上短路匝数与谐波幅值基本成正比,因此可以得出匝间短路匝数与引起的差流谐波总有效值的关系为4.25×10-3p.u./匝。

表1 励磁绕组单匝金属性短路差流各次谐波有效值Table 1 Effective value of differential current with single inter-turns short circuits fault
基于模型对故障特征角进行计算,根据现场键相槽与键相传感器的安装位置,以及分支电流的选取,经过仿真以及计算得到不同工况下A相差流各个磁极的故障特征角如表2所示。

表2 A相差流各磁极故障特征角 单位:(°)Table 2 Pole characteristic angle of phase A
B相、C相故障特征角与A相计算方法相同。
3.2 现场试验
湖北白莲河抽水蓄能电站2号机组上安装了励磁绕组匝间短路故障监测及定位系统,机组原先并未安装分支电流互感器(CT)。由于机组内部空间较小,因此采用柔性光CT采集分支电流和相电流,柔性光CT具有体积小、安装灵活、测量精度高等特点。光CT设备安装如图 5所示,共安装6个,分别测量三相的相电流和分支电流(任意选择其中一个分支)。额定转速未并网时三相不完全纵差差流波形以及频谱如图 6所示。

图5 光CT现场安装图片Figure 5 Diagram of optical CT

图6 未并网不完全纵差差流波形及频谱图Figure 6 Off-grid waveform of differential current without inter-turn short circuits fault
空载运行时三相不完全纵差差流波形以及频谱如图 7所示。

图7 空载运行不完全差流波形及频谱图Figure 7 No load waveform of differential current without inter-turn short circuits fault
满载运行时三相不完全纵差差流波形以及频谱如图 8所示。

图8 满载运行不完全差流波形及频谱图Figure 8 Full load waveform differential current without inter-turn short circuits fault
对比图6、图7、图8可知,与并网后状态相比,未并网状态下差流在50Hz频率附近出现连续频谱,这是因为机组虽然运行在额定转速,但是由于未并网情况下转速存在一定的波动,当频谱分析数据窗取得比较长时,受转速波动的影响就可能出现连续频谱的现象。1/P分量的相位计算精度要求较高,数据窗一般取的比较长,这些连续频谱分量会对差流中1/P分量的相位计算产生影响,而并网后差流谐波频率基本上都是1/P的整数倍,不会对1/P分量的相位计算产生影响。因此,应在并网后进行故障定位计算。
表 3为空载和满载情况下三相差流各次谐波有效值计算结果。根据计算结果可知,大部分谐波在两种工况下有效值基本一致,由于CT传变误差等因素影响,满载运行时差流总谐波含量较空载运行时要大一些。机组运行工况对差流谐波影响不大。

表 3 空载/满载工况各谐波次数有效值Table 3 Effective value of differential current
根据表 3可知,机组正常运行情况下不完全纵差差流中除工频分量外其他分数次谐波差流最大总有效值为1.35×10-3p.u.,按最大不平衡差流情况下可靠不报警原则整定,可靠系数取2,计算匝间报警定值为1.35×10-3p.u.×2=2.7×10-3p.u.,根据3.1节中的分析结果,单匝金属性短路时谐波总有效值为4.25×10-3p.u.,因此,系统能够反应单匝及以上的短路故障。
表 3中正常情况下1/P次谐波有效值最大为0.18×10-3p.u.,而表 1中单匝金属性短路时1/P次谐波有效值为1.12×10-3p.u.,轻微短路故障时固有1/P次谐波分量对故障相位角的计算有一定的影响,定位结果可能出现一定的离散性。因此,在轻微故障时,还需要结合其他故障特征对定位结果进行进一步的分析,确定最可能发生故障的磁极。
4 结束语
本文介绍了一种基于定子分支绕组电流的励磁绕组匝间短路故障定位系统,该方法首先获取定子绕组相电流和分支电流信号以及键相信号,通过电气量和机械量的时域对应关系实现励磁绕组匝间短路的故障定位,并应用于白莲河抽水蓄能电站,通过对现场实测数据及故障仿真数据进行分析,得到以下结论:
(1)励磁绕组轻微匝间短路时故障电流幅值很小,需采用高精度的CT实现故障的监测以及定位。
(2)实现故障磁极定位需要对机组中磁场量和电气量的对应关系进行定量化的分析,一般采用仿真建模的方法对其进行分析计算。
(3)故障定位对机组转速稳定性要求较高,因此,应在机组并网状态下进行故障定位分析计算,机组的固有不平衡分量会对故障定位产生一定影响,轻微故障时还应结合其他故障特征最终确定故障位置。
匝间故障定位准确度与CT测量精度、传感器安装位置、机组本身不平衡量大小等因素有关。大型水电机组磁极较多,故障特征不明显并且对定位相角计算的允许误差要求更高,如何实现更高精度的采样以及特征量的处理是能否实现准确定位的关键。