基于机器视觉的建筑结构施工中房屋裂缝智能检测方法
2022-03-12刘同
刘 同
(吕梁学院,山西 吕梁 033001)
0 引言
在中国经济高速增长的过程中,社会也在不断向现代化的方向发展,我国城市化建设不断推进,城市内的建筑数量不断增长。即使是在建筑行业的鼎盛时期,建筑物的质量问题也不容忽视,建筑行业对建筑物的质量要求极高,工作人员不断提高建筑技术水平,建筑物的结构安全也继续提升。在建筑物的缺陷中,裂缝是最常见的一种,一旦建筑物中出现裂缝,就会直接影响房屋结构的防水性和耐久性,其承载力也会相应下降。人们在检测房屋建筑的裂缝数据时,通常会使用人工检测的方法,即目测法。该检测方法需要检测调查人员走到房屋现场,使用仪器设备测量房屋建筑表面裂缝的宽度、长度等特征值,并进行统计与分析。但是人工检测的方法速度慢,需要耗费大量的人力物力,由于现阶段检测精度不断提高,其检测效果已经无法满足当前的检测需求[1]。随着高层建筑的兴起,人工检测难度增加,这种检测方法已经很难满足施工建筑房屋的裂缝检测需要。为获取更准确的裂缝信息,使用机器视觉技术,获取建筑结构施工中房屋裂缝的智能检测方法。
1 基于机器视觉的图像预处理
想要获取准确的裂缝信息,就要使用高精度的摄像机,得到高质量的图像。但是高分辨率的图像会携带大量的无关信息,造成数据冗余,并导致检测效率变差。为提高机器视觉方法图像分析结果的效率,使用相关软件对摄像机所拍摄的图像进行矫正,并直接灰度化处理。最初,无人机拍摄的初始图像一般为RGB 的彩色图像,但是彩色图像所占用的内存比例远大于黑白图像,因此需要首先将彩色图像转换灰度图[2]。选择像素中的红绿蓝三个分量,作为对像素进行灰度化处理的加权均值,如公式(1)所示。
式中:F(i,j)为整体像素的灰度化加权均值;R(i,j)为图像内红色分量的灰度值,G(i,j)和B(i,j)分别为房屋裂缝图像内绿色和蓝色分量的灰度值。结合顶帽变换的方式分离图像背景中的亮度信息,通过中值滤波算法对拍摄图像进行平滑处理,避免背景噪点过大导致图像预处理失败。在获取二值图像的过程中,高阈值的边缘像素通常都具备最小的灰度等级,一阶梯度算子可以通过梯度锐化的方法,结合图像灰度变化曲线对图像进行边界定位[3]。在Roberts 算子的作用下,突出对图像对象边缘信息,计算图像灰度变化效果下的二阶导数,划定灰度突变的待测区域,得到图像裂缝中的的纹理结构。在提取图像边界信息的过程中,设定裂缝区域像素值为1,非裂缝区域像素值为0,得到裂缝区域的边界点如图1 所示。
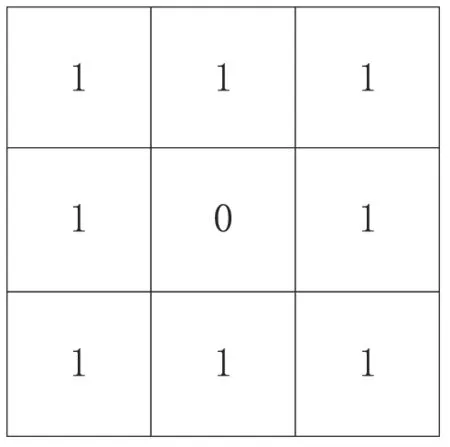
图1 裂缝像素边界
如图1 所示,结合边界提取算法,可以得到灰色区域的内部信息。在滤波降噪的基础上,搜索图像像素的相邻区域,计算单一像素的灰度值,并通过公式求取其平均灰度值。如果图像中的某个像素点可以作为邻域集合的形式,则其平均灰度值计算如公式(2)所示。
式中:p(x,y)为某像素点经过平均值计算后的灰度值;f(x,y)为建筑结构施工条件下,某裂缝边界中心点的灰度值;Mn为像素数量。这种图像预处理的方法简单快捷,不但节省时间,而且可以集中保护图像中的细节信息。因此可以通过干扰噪声点的方式,保证图像灰度值的平和稳定。
对裂缝区域边界信息进行量化操作,获取像素值,以保证浮点数的计算。为解决量化偏移问题,需要将提取得到的特征数据输入掩模分支中,将图像中的对象进行多层次分割,并提取其特征映射系数。对两个相邻的像素点进行线性插值处理,如公式(5)所示。
式中:k(x,y)为上述两个相邻像素点的线性插值;(x1,y1)为第一个内插值的点坐标,(x2,y2)为第二个内插值的点坐标;xi为最合适的插值像素;yn和ym则为对应区域像素单元的中心点坐标。对4 个采样点的灰度值进行赋值处理,其中存在低分辨率的过滤效果。在区域内生成一个小型的神经网络,寻找目标区域,并生成候选背景。当函数判断该候选框为目标区域时,就会有效提取重复特征,进而提高识别效率。
2 建筑结构施工中防误裂缝识别方法
结合经过预处理的图像信息,可以得到一个容量较小,且清晰直接的灰度图像,此时就可以通过神经网络对房屋裂缝进行智能检测与识别。卷积神经网络一般通过输入层、隐含层和输出层3 个部分构成。在输入层中,算法提取外部信息,并结合分类标签对其进行接收与传递。在最后的输出层,信息通过隐含层处理后的结果会直接得到一个分类标签,通过机器视觉提供的图像信息,得到像素的识别结果与分类。最中间的隐含层则是一个位于输入层与输出层之间的处理机制,隐含层最本质的最用就是处理通过输入层传递进来的图像信息,使其能够成为可以被机器识别的结构,这一层也是神经网络中神经元最集中的区域[5]。相邻的神经元彼此连接,在激活机制的作用下,对图像信息进行处理。
在隐含层中,主要包括卷积层、池化层、激活函数层以及全连接层4 个主要结构。卷积层最主要的功能是提取输入信息,并通过特征降维的方式,重新划分属性权值参数。卷积层的权值参数可以通过卷积核大小、步长和填充三种方式来决定,结合输出特征图的特性,获取检测技术下正式卷积核的超参数大小。当输入图像的大小为m×n时,输出图像,如公式(3)所示。
式中:F(x)为输出图像的大小;Kp为待填充的图像尺寸;fp为卷积核大小;Ds为房屋裂缝检测的步长。当F(x)为一个整数时,可以得到输出图像的结果。池化层则是一个居于卷积层内部,通过特征提取获得特征图,并进行信息过滤的结构。在预设的池化函数之间,可以将现有的特征结果替换为完整的统计量。在激活函数层,其函数表达式如公式(4)所示。
式中:p(x)为结合线性模型的激活函数;x为像素点权值。在全连接层内,卷积层与池化层均能够得到非线性组合下的提取特征,并通过神经元与外部的连接机制,获取传递后的输出值。此时通过判别机制,就可以得到建筑结构施工中防误裂缝的识别结果。
3 试验研究
3.1 试验准备与过程
为验证基于机器视觉的建筑结构施工房屋裂缝智能检测方法的有效性,设计下列试验。为获取图像样本,需要拍摄具备裂缝的房屋墙面图像,但是原始的房屋裂缝样本在实际中很少见到,因此可以在实验室内使用模拟工具模拟墙体开裂,将遮光布作为墙面裂缝的背景,将白色硬质纸壳作为模拟墙面的背景,使用摄像机作为机器视觉图片的拍摄工具。为保证卷积神经网络训练结果的准确性,图像数据的尺寸大小需要统一,在该摄像机中选择照片的分辨率为4032×2268。如果分辨率过大,会导致图像预处理时的信息量超出额定值,而导致图像处理失败,如果分辨率过小,就会出现房屋裂缝的细节信息不足以及智能检测方法精度不够的情况。使用裂缝显微镜、激光测距仪、钢卷尺作为对裂缝长度辅助测量的工具。在试验中,首先将黑色遮光布固定在墙面上,将白色硬质纸壳覆盖在黑色遮光布上。使用剪刀通过特定的轨迹在白色硬质纸壳上剪开一道缝隙,作为模拟环境下的墙体裂痕。为保证试验结果准确无误,设置4 个墙体裂缝模型,如图2 所示。

图2 墙体裂缝设置
使用激光测距仪确定摄像机的拍摄距离,并在上述四道裂缝中分别布置测点。在裂缝A、裂缝B、裂缝C、裂缝D 中分别设置四个测点,记做A1、A2、A3、A4,B1、B2、B3、B4,C1、C2、C3、C4,D1、D2、D3、D4。在试验中,计算机需要保证处理器和显卡的性能,内存需要使用32G,存储空间则需要至少1TB 的机械硬盘。在训练测试集时,计算机使用Windows 操作系统。
3.2 裂缝提取结果
使用高精度的摄像机拍摄的图像容量过大,因此需要使用机器视觉技术对图2 中的墙体裂缝进行提取,得到如图3所示的图像结果。
在该智能检测技术中,虽然图像由2MB 压缩至50 KB 左右,但是仍然最大程度地保留了裂缝信息。整理试验数据,可以得到四道裂缝下的测点部位的测量值,见表1。
如表1 所示,在不同的墙体裂缝下,摄像机拍摄图片的距离不同,其中裂缝A 的摄像机距离墙体裂缝的距离为336mm,是4 个试验中最近的一个。裂缝B、裂缝C、裂缝D下,摄像机距离墙体的距离分别为568mm、748mm、669mm。通过裂缝显微镜和钢卷尺对裂缝标记部位进行宽度测量,得到实测值,并通过图3 中的提取图像获取裂缝宽度信息,作为提取值。
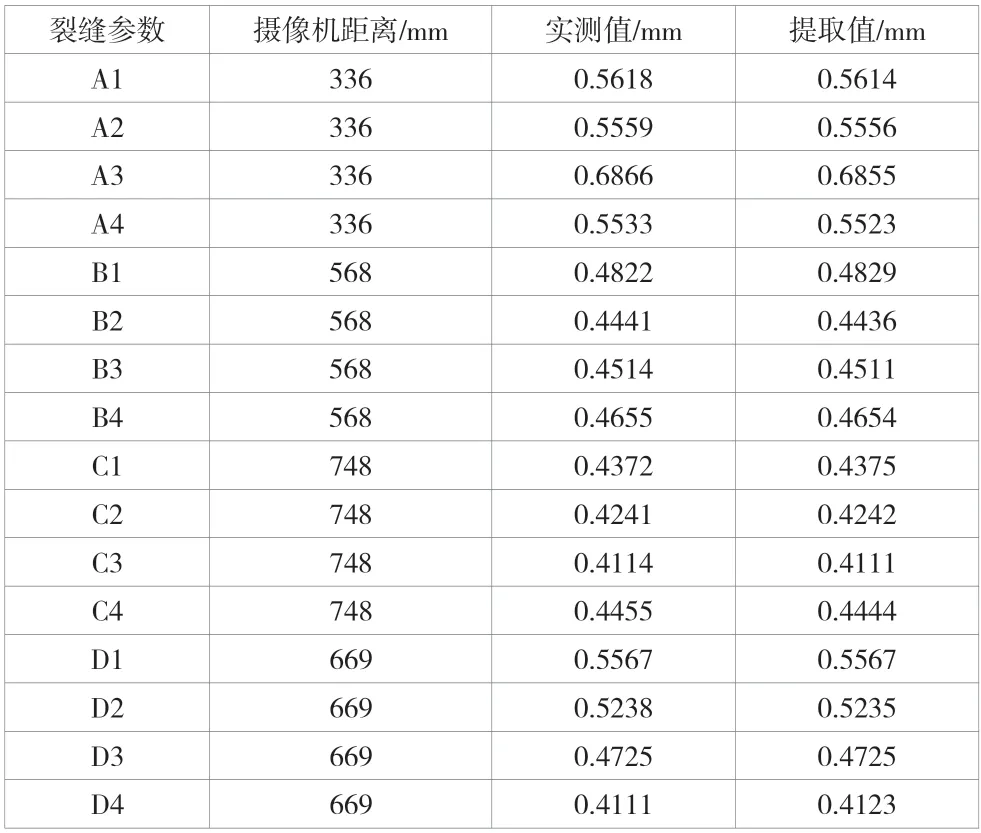
表1 裂缝提取测量值
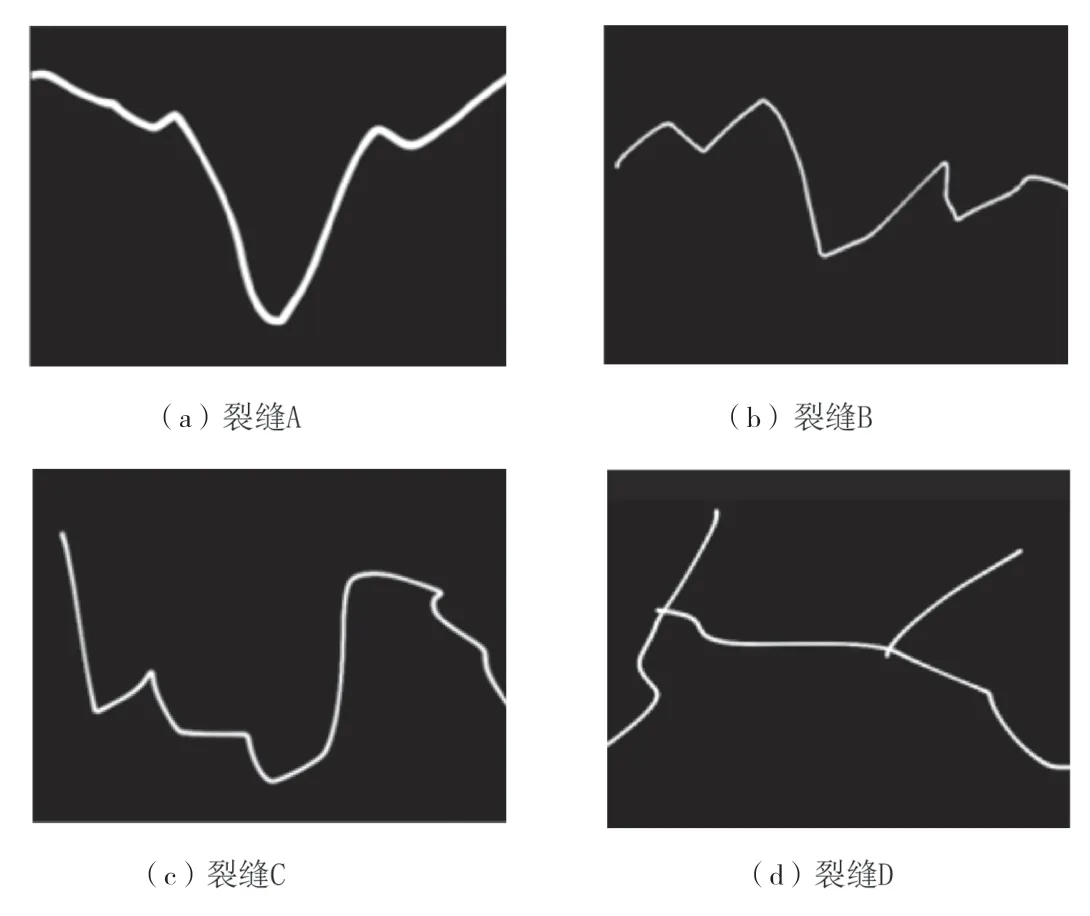
图3 裂缝提取图像
计算提取值与实测值之间的绝对误差,使用实测值减去提取值,得到试验结果。裂缝A 的4 个标记点的绝对误差分别为0.0004 mm、0.0003 mm、0.0011 mm、0.0010 mm,裂缝B 四个标记点的绝对误差分别为-0.0007 mm、0.0005 mm、0.0003 mm、0.0001 mm。裂缝C 四个标记点的绝对误差分别为-0.0003 mm、-0.0001 mm、0.0003 mm、0.0011 mm。在裂缝D 处,4 个标记点的绝对误差分别为0 mm、0.0003 mm、0mm、-0.0012mm。由此可见,该文设计的房屋裂缝智能检测方法可以完成对裂缝的智能检测,且检测精度较高。
4 结语
该文设计了一种基于机器视觉的建筑结构施工中房屋裂缝智能检测方法,该方法可以对摄像机得到的图像进行预处理,并通过干扰噪声点的方式,保证图像灰度值的稳定。结合建筑结构施工技术设计房屋裂缝识别方法,通过神经网络算法,得到房屋裂缝识别结果。该试验对裂缝信息的提取效果进行测试,试验结果显示,裂缝提取的测量值与实测值之间的绝对误差极小,可见检测精度较高。但是该文的智能检测方法并没有对墙面上的干扰线条进行优化,在下一步的研究中,可以针对该问题对房屋裂缝智能检测方法进行优化,同时在试验中添加与裂缝信息相近的事物,作为干扰项,测试该检测方法的性能。
