无人机航测大比例尺地形图的探索和精度分析
2022-03-12聂雄林
聂雄林
(新干县自然资源局,江西 吉安 331300)
密集建成区的1 ∶500 大比例尺地形图测绘因施测难度大和工作量大,传统测绘方法外业需要派出大量的外业测绘员,测绘成本高而且效率低[1]。传统航空航天摄影测量具有效率高、成本高、现势性差以及精度低的特点,一般用于大范围小比例尺测绘任务[2]。随着无人机航测技术水平的发展,无人机航测大比例高精度地形图成为现实。目前无人机航测普遍搭载的是五镜头相机,在航拍时会产生很多不必要的冗余照片,照片量大且数据量大,创建三维模型时需要多台电脑集群处理,硬件成本投入较高[3]。
在房屋密集的村庄等复杂地形情况下,房屋间的间距都很小,巷距经常是几十公分,房前屋后树木绿化较多[4]。由于遮蔽严重,当无人机搭载五镜头相机进行航测时,受遮挡部分的模型结构存在黏连、纹理失真、扭曲变形的情况,后期无法刺点绘制线画地形图,精度也大受影响。笔者结合项目实例探索使用高像素单镜头相机进行倾斜摄影测量,观察其创建的三维模型纹理清晰度等情况,并对最终线画图成果进行精度检查分析。
1 测区概况
该项目测区位于新干县河西某个村庄,面积约80000m2。属于丘陵地形,海拔高度为33 m~38 m,地势起伏不大,周边无较大山体,该测区及周边区域不属于禁飞区域。村庄内部巷道地面基本都用水泥硬化,便于像控点喷涂,由于房屋密集,巷子狭窄,树木较多,给像控点的选择带来不便,选择位置时须谨慎,尽量选择较空旷的村内小广场或无遮挡的村内硬化地面,满足像控点刺点时有效照片的数量。测区内及周边300 米范围无超过50 米高度的建筑物和构筑物,飞行高度选择空间较大。航拍当日天气晴朗,风力为1 级~3级,温度28 ℃,能见度为1 km 以上,气象条件较好。
2 项目实施
2.1 作业流程
项目倾斜摄影测量流程分航前准备及检查、航空摄影数据采集、内业建模成图和测绘成果检查4 个阶段。航前准备及检查包括规划航线、测设像控点、无人机平台以及挂载传感器硬件检查等;数据采集阶段即是无人机搭载传感器设备,根据规划的航线飞行,对地面地物影像数据进行采集,包括一个垂直视角影像和4 个倾斜视角影像;建模成图阶段空三解算、模型重建时软件都会生成质量报告,如质量报告显示结果不符合规范要求时,须查找原因,必要时要返工重新航测;成果检查阶段外业施测量检查点时要选择一些固定的棱角分明的特征点,例如房角点、门墩角点等,如图1 所示。

图1 航空倾斜摄影测量流程图
2.1 选择起降点
在选择起降点时,尽量选择测区中间航线两侧的地方作为起降点,以便将数传电台传输距离最大化,且须选择空旷人流较少的地方,禁止在人流车流交通量大的马路、乡间道路上、树木下方、电线通信线路下方、房屋周围起降无人机,以免发生碰撞事故,周围10 m 内应无人员活动。测区呈东西向分布,有村内巷道环绕通行,但时常有人员车辆通行,且东西两端距离约500 米,测区内没有高大的建筑物遮挡,能保证数传电台的有效传输距离,考虑到安全因素,因此将起降点设置在测区东北角的村委会院内空旷地上,起降点位置如图2 所示。

图2 起降点及像控点位置示意图
2.2 航线规划
根据倾斜摄影三维模型重建的要求,需要从垂直和倾斜多个角度对地面目标的影像数据进行采集。五镜头相机一般是由一个垂直镜头、4 个45°倾斜镜头来采集地面影像。我们规划了一条垂直摄影航线和四条倾斜摄影航线。为了尽可能地创建更清晰和精度更高的三维模型,选定飞行高度为84m,起飞速度为14m/s,航线速度为8.5m/s,倾斜航线速度为15m/s。地面分辨率1.05cm/像素,倾斜分辨率1.49cm/像素。旁向重叠率75%,航向重叠率80%,倾斜旁向重叠率78%,倾斜航向重叠率82。当日风向为由南向北吹,所以设置主航线角度0°,尽量避免飞机横向侧风。航线布设如图3 和图4 所示(只附了1 条垂直摄影和1 条倾斜摄影航线)。

图3 垂直摄影航线1

图4 倾斜摄影航线2
2.3 布设像控点
一般来说,像控布设要遵循标注清晰、视野开阔、均匀分布、覆盖测区、像控位置固定、像控布设在无高差平面上的原则;同时还要以外业无人机能清晰明显拍摄,内业能够容易准确找到为标准。由于无人机倾斜摄影测量空三的精度最弱点位于测区的边缘,而不在测区的中间地带,测区中间精度较高而且比较均匀,精度最差点在测区的边缘。适当增加像控点数量和密度,能在一定程度上提高空三解算的精度,但并不是像控点越多越密越好,过多过密的布设像控点,对空三解算的精度提高并没有起到明显的作用,反而会大大增加外业布设像控点和内业刺点的工作量,性价比较低,得不偿失。在条件允许的情况下,像控点应该均匀布设在测区可摄范围内,且要加强测区边缘地带的网控制力度,像控点上方无遮挡,截止高度角45°,即天顶角45°内无物体遮挡。这种满足测区四围控制,适当增加测区内部像控点布设的方式可以在满足精度要求条件下减少控制点的数量,还可以有效改善区域四周的精度。因项目测区范围面积不大,充分考虑现场适合布设像控点的位置条件,为提高工作效率,布设6 个像控点,其中K5 作为检查点。像控点布设位置如图2 所示。像控点用红油漆涂成“L”型,使用RTK 测量坐标,用GNSS 架站方式以控制点的标准量测。坐标参考系统为国家2000 坐标系、85 黄海高程基准,拟和高程;采用千寻网络RTK 固定解,设定两测回,每测回10 次平滑方式记录数据。
2.4 无人机航空倾斜摄影采集地面数据
在开始飞行作业前,要进行航前检查,飞机脚架和挂载的相机是否按规定牢固安装到位。为保障任务安全,起飞前结合飞行控制软件进行自动检测,确保飞机的GPS、通信链路等信号状态良好,避免在航拍中危险情况的发生。无人机起飞后,要通过遥控器实时观测飞机的飞行参数,如电量、飞行时间以及飞行高度等。在城市和建筑密集区,航摄区域备选起降点较少时,就会出现当前架次航摄区域与起降点距离很远的情况。因此,在起飞前设置合适的电台断开时间。并根据飞行时长在航摄区内选择合适的地点提前去等待飞机,保证电台能及时连上飞机,避免电台断开时间过长,出现飞机在航线未飞完时便自动返航的情况。飞机在转弯过程中容易出现信号断开情况,因此等待点要选择在交通便利、地势开阔的地方,尽量选择航程中段的航带中部位置。测区内没有能挡住电台信号的高大建筑,所以在航线执行过程中只需要时刻关注遥控器飞控软件显示的通信链路信号情况。飞行任务持续了53 min,五条航线飞行总长度25 114 m,共采集了2 567 张地面照片。
2.5 重建三维模型
将航测外业采集到的地面照片导入建模软件,设置好坐标系就可以进行空三解算,图5 中地面点为不同照片的同名像点,空中点为每张照片的空中采集点。空三解算的质量结果见表1 和表2,平面坐标X中误差为1 cm,Y中误差0.6 cm,高程中误差1.9 cm。精度符合规范要求,进行下一步重建三维模型。将坐标系等参数设置好后进行模型重建,模型重建的质量报告内的质量情况与空三时一致,说明外业航测数据的精度质量比较好。
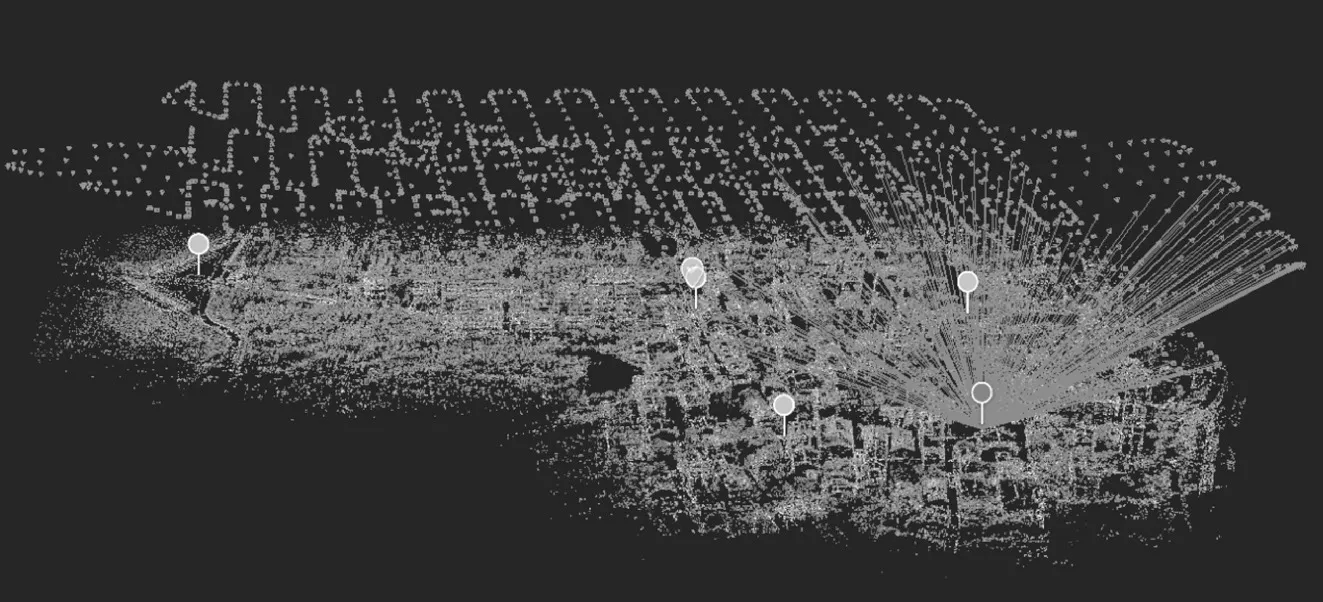
图5 同名像点、摄影航点与像控点位置关系图
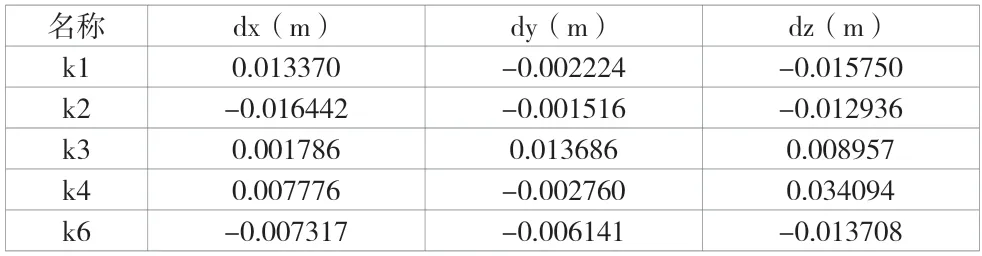
表1 地面控制点精度结果

表2 控制点均方根误差表
图6 为模型全貌,图7 和图8 为模型局部,通过观察模型,模型的重建效果非常好,清晰、真实地反应狭窄巷道内台阶、阳台下的房角墙面、大树村荫下的房屋墙壁和沥青路面等地形地物,可以利用重建的模型直接开始刺点绘制线画地形图。

图6 三维模型全貌

图7 三维模型局部

图8 三维模型局部
2.6 利用模型绘制地形图
要绘制的是1 ∶500 地形图。如图9 所示,在绘图软件中打开三维模型,左图是三维模型,右图是线画图。画房屋时可以直接刺房角点画图,对四面型房子也可以采用5 点法画图,具体方法是先在房屋的一面墙上点选2 个点,软件会自动将墙面生成一个面,然后依次在下一个墙面上点选一个点,每个墙面都会生成面,采取面面相交的方式将房角点相交出来,到最后一个墙面生成时闭合图型,注记房屋结构层数,一栋房子就画好了。

图9 利用三维模型绘制1 ∶500 地形图(左图为三维模型,右图为1 ∶500 平面地形图)
地形地物的画法也一样,直接在模型上依次捕捉特征点,根椐《国家基本比例尺地图图式第一部分1 ∶500 1 ∶1000 1 ∶2000 地形图图式》(GBT 20257.1-2017)要求分别将居民地、交通设施、管线、地貌、植被等地形地物逐一绘制出来。高程可以在模型地面上直接逐个点击生成,也可利用软件根据一定的间距统一生成数据文件导出,再进行展高程点的操作。线画地形图全部绘制完成如图10 所示。

图10 1 ∶500 地形图
3 精度分析
3.1 检查点测量
最终线画地形图成果需要通过现场测点与模型刺点采集的坐标进行精度的检核和分析。以测像控点的方式利用RTK 布设图根控制点,利用全站仪设站的方式免棱镜随机测量房角点坐标共计50 个。利用RTK 测量硬化地面点高程50 个。
实测点与模型精度对比:以全站仪现场实测检查点为基准,在三维模型上刺点量测相对全站仪实测点的平面位置中误差、高程中误差分别按下面公式(1)计算。
式中:m1为检查点中误差,m;Δ 为检查点全站仪现场实测值与模型刺点坐标值的误差,m;n为参与评定精度的检查点数。
3.2 平面坐标精度分析
利用全站仪实地采点共计50 个,经过以上中误差计算公式统计精度情况:全站仪实测坐标与三维模型剌点坐标点位中误差为0.043m,最大点位误差为0.075m。
3.3 高程精度分析
利用RTK 实测地面硬化路面高程点50个,经过以上中误差计算公式统计精度情况:RTK 实测地面高程与三维模型剌点高程中误差为0.061m,最大高程误差为0.119m。
4 结论
本次航空倾斜摄影测量项目的实践,通过无人机挂载高相素单镜头相机从1 个垂直和4 个倾斜角度对密集建成区目标进行倾斜航空摄影测量,能最大限度地减少因树木、房屋等遮蔽对倾斜摄影测量三维建模的影响,三维模型清晰度高,缺陷是飞行航线较挂载五镜头相机的航测方式要更长,要配备更多的续航电池。根据精度分析得出,利用该方法绘制的1 ∶500 地形图,精度符合规划要求,能满足不动产登记房产测绘的精度要求。
