自动驾驶汽车外显界面对过街行人的行为影响研究
2022-03-09陈宁秦华褚英帆张然
陈宁 秦华 褚英帆 张然
(北京建筑大学机电与车辆工程学院,北京 102616)
随着自动驾驶汽车行业的迅速发展,预计在不久的将来,在公共交通中引入完全自动驾驶汽车将成为现实[1]。在这种情况下,今天的行人将很难再依赖于驾驶员行为中的线索去选择是否过街。为了实现未来自动驾驶汽车与行人之间高效、安全的交互,以及自动驾驶汽车如何将其意图传达给行人,由此设计了很多种车辆外部接口[2],也就是自动驾驶汽车的外显界面,它能将车辆的模式和内容与行人进行通信,很好的代替了传统车辆中驾驶员的行为线索。目前为止,自动驾驶汽车外显界面有许多种表现形式,比如文字、图案等,此前有许多人研究这些表现形式对行人过街行为的影响[3]。例如文字沟通形式适用于呈现简短、明确的信息,研究者常用文字信息向行人呈现当前车辆状态、意图或对行人的指示。文字信息不需要被刻意地学习, 能更明确地传达车辆的让行意图, 且更具说服力, 也让行人感觉更安全;图标界面沟通方式多采用简单图像呈现交互线索, 按照呈现的图形特点可以分为两种类型:拟人化/非拟人化图形;静态/动态图形[4]。与非拟人化的图形相比, 拟人化图形,能够更明确传达有关当前过街是否安全的信息(Fridman et al.),研究者们还发现, 静态信息在可识别性和信息传递效果方面都不如动态图形(Othersen et al.),并且此类界面的可理解性需要通过培训才能被提高。此外,信息呈现角度同样有研究表明,自动驾驶汽车外显界面的信息可分为两类[5]:涉及行人的信息以及涉及自动驾驶汽车为中心的信息。例如在某个特定的场景中以行人需要过街为背景,如果外显界面提供了一个以汽车为中心信息,行人首先需要解释自动驾驶汽车将要做什么,然后才能决定行人是否可以过马路。相比之下,如果外显界面显示以行人为中心的信息,行人可以直接遵守该信息[6]。因此,我们预计以行人为中心的信息将被视为比以汽车为中心的信息更清晰。但是目前尚不清楚自动驾驶汽车是否应指示其状态或行人要求采取的行动[7]。综上所述,目前外显界面与行人交互的研究大都集中在国外,且研究内容相对分散并未将外显界面的多方影响因素进行整体性的研究,国内更是鲜有此类探究。本研究则是从呈现形式和呈现角度两个研究因素出发,通过多维度评价指标进行了整合性分析,为未来实现完全自动驾驶提供外显界面在呈现内容的设计提供新的视角和方向。
1 研究方法
考虑到当前自动驾驶汽车外显界面的呈现形式中文字、图案的研究比较广泛,本研究就针对自动驾驶汽车外显界面中文字、图案、图文结合这三种不同的呈现形式以及以汽车为中心和以行人为中心两种不同的呈现角度一共设计了6 组实验。6 组实验都是自动驾驶汽车给行人让行的意图,但其中也加入了不让行的设计,是为了避免行人每看到一个呈现内容都会选择过街的效应。实验过程分为:(1)采用绿野仙踪实验法;(2)当每个参试者完成一组实验需要填写一份问卷,一共6 组实验全部完成需要填写6 份问卷;(3)在后续还会进行一个焦点小组访谈。
1.1 参试者
本次实验共有10 名参与者,分为7 名男性和3 名女性,年龄从22 岁到26 岁(标准差为1.18 岁,方差为1.39 岁),构成最终样本。参试者通过校内招募,被试需满足:(1)无自动驾驶使用经验;(2)视力良好;所有参与者随机被安排实验顺序,并且均是签完书面知情同意书并获得了金钱补偿。
1.2 实验平台
如图1 所示,本次实验所用的设备为一辆模拟自动驾驶汽车与放置在车顶的LED 显示屏(长为80cm,高为16cm 的全彩LED显示屏,分辨率为80*16)。如图2 所示,实验在校内封闭道路进行。实验道路长度为100 米,宽度为3 米的双车道,道路两头会设置路障柱将道路封闭。如图3 所示,本次实验所用的汽车是采用“绿野仙踪”实验法模拟的自动驾驶汽车,将车上的驾驶员用一块黑布挡住,只露出两个眼睛,这样就能达到从行人的视角来看是无驾驶员操作汽车,同时车上会坐一位安全员,目的就是为了模仿自动驾驶汽车的行驶状态。

图1 实验车辆和LED 显示屏

图2 封闭实验道路

图3 绿野仙踪实验法
1.3 实验变量
研究有两个自变量,分别是外显界面不同的表现形式,文字、图标、图文结合相结合三种表现形式;车辆信息呈现的角度,以汽车为中心和以行人为中心这两种角度进行研究。
实验场景基于交通路口,行人与自动驾驶车辆交互时,自动驾驶汽车呈现信息,行人做出行为反馈。由此,实验参数设计如下:

表1 LED 外显界面6 种不同的呈现内容
1.4 评价指标
客观评价指标:将参试者在面对6 组不同的外显界面呈现内容时过街的平均通过时间以及通过率作为客观指标进行分析。
主观评价指标:为了对自动驾驶汽车外显界面有一个主观评价,从黎兰平的自动驾驶汽车车外人机交互界面设计研究中引入了简单明确性、熟悉性、一致性、舒适性这四个评价标准,并对外显界面整体的呈现进行一个总体评价。其中简单明确性、熟悉性、一致性、舒适性这四种评分标准为(1-5 分);总体评价的评分标准为(1-10 分),分数越高代表越好。
1.5 实验过程
首先,行人阅读实验指导书。然后参试者戴好眼罩由实验员带到实验交通路口的道路两边进行等候,同时驾驶员需要用一块黑布将自己遮挡住来模仿绿野仙踪实验法,车上还需配备一名安全员,起到保证实验安全的目的。
车辆从距离行人100 米处开始加速行驶,当行驶到距离行人50 米处时汽车速度需要达到15km/h,然后保持这个速度进行匀速行驶(15km/h 等于4.6m/s,一个成年人正常的过街的步行速度大约为1m/s,所以通过3m 宽的街道大约需要3s,而汽车行驶以15km/h 的速度行驶50m 需要13s,所以即使汽车匀速行驶行人也有足够的时间穿过街道),与此同时行人需要摘下眼罩,车辆上的LED 显示屏开始播放需要展示的内容,行人开始观察车辆上的LED显示屏所显示的内容,并且做出自己的过街决策。
每个行人共有6 个实验任务(分别为以行人为中心的三个任务和以汽车为中心的三个任务),每完成一个任务时行人都需要重新返回起点处进行准备下一次的实验;汽车也需要重新返回到距离行人100 米处的地方开始准备下一次的实验,直到当完成6 个任务为止,则算是一个行人完成了所有的实验内容。每个行人遇到汽车上的LED显示屏所显示内容的顺序都是随机排列的,并不是每个人都按统一的顺序进行实验。
每个参试者每完成一个任务需要填写一份问卷,填完之后再进行下一个任务,以此类推到6 个任务都完成并且填完6 份问卷算是任务结束。
2 数据结果
2.1 描述性统计
2.1.1 客观评价指标
根据表2 可以知道在实验中通过率最高的为B 任务和E任务,都达到了100%的通过率,并且B任务和E 任务平均通过时间最低,都为5.5s。在实验中通过率最低的为D 任务,只有60%的通过率,并且D 任务的平均通过时间也是最高的,为7.16s。参试者对于3 种显示方式(文字、图案、图文结合)理解最好的为以行人为角度的文字和图文结合的显示方式,理解最差的为以汽车为角度的图案的显示方式。

表2 客观评价指标描述性统计结果
2.1.2 主观评价指标性来说评分最高的为E,评分最低的为D;对于总体评价来说评分最高的为E,评分最低的为D。从上述的分析可以得出在不同的显示内容中文字和图标的表现方式的得分最高,而图标的表现方式得分最低,这就说明对于文字、图标、图文结合这三种表现方式来说最能被大家所理解、所接受的表现方式为图文结合,而大家最不认可的表现形式为图标。

表3 主观评价指标描述性统计结果
2.2 方差分析结果
2.2.1 客观评价指标
由表4 可知,A 显示方式与D 和F 这两种显示方式存在显著性影响(P=0.003 和P=0.011),B 显示方式与D 和F 这两种显示方式同样存在显著性影响(P=0.001 和P=0.004),C 显示方式与D显示方式存在显著性影响(P=0.045),D显示方式与A、B、C、E 这四种显示方式存在显著性影响(P=0.003、P=0.001、P=0.045、P=0.001),E 显示方式与D 和F 这两种显示方式存在显著性影响(P=0.001 和P=0.004),F 显示方式和A、B、E 这三种显示方式存在显著性影响(P=0.011、P=0.004、P=0.004)。
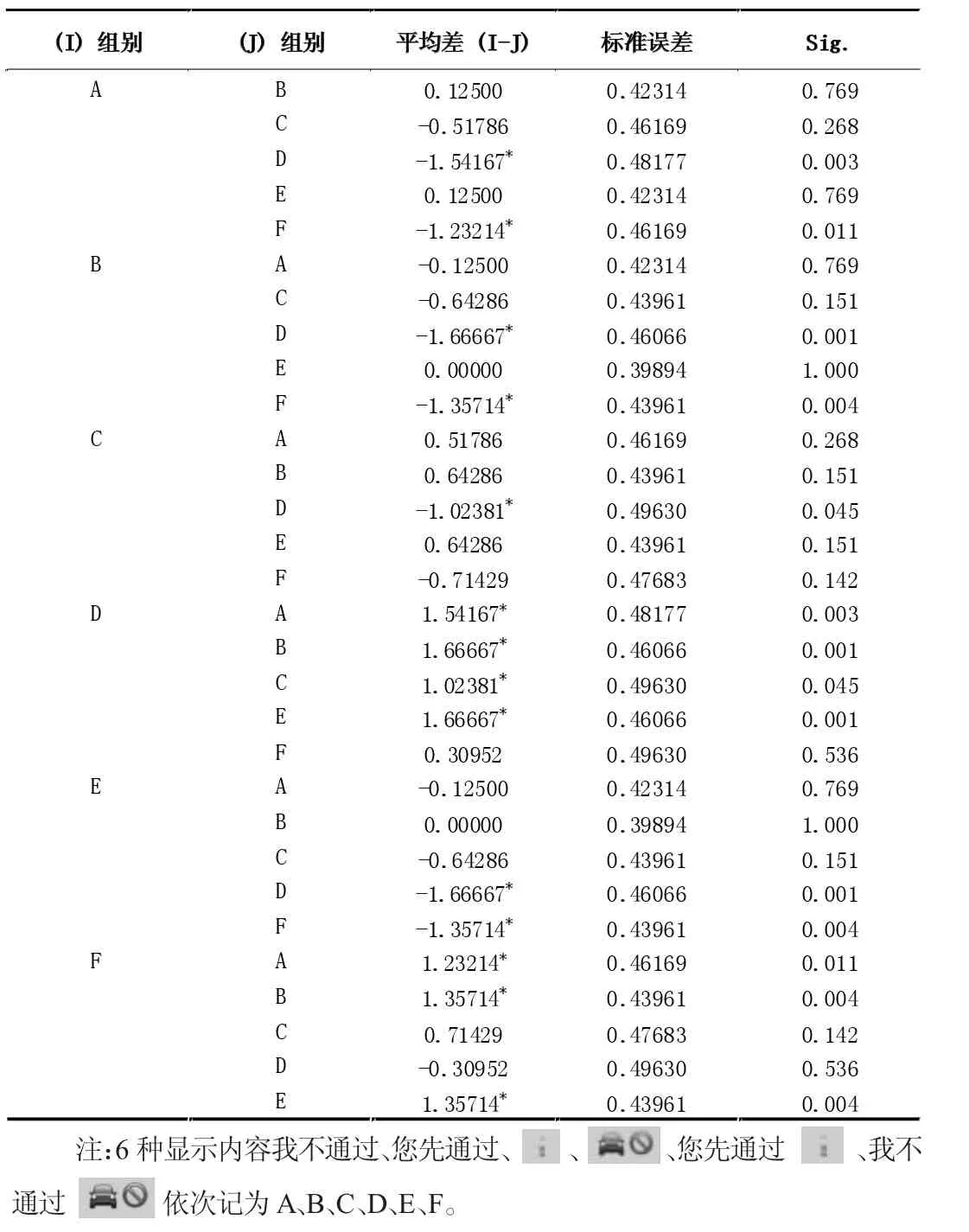
表4 客观评价指标方差分析结果
2.2.2 主观评价指标
在利用此次实验结果进行的方差分析可以看出,在对于外显界面文字、图案、图文结合三种不同的显示方式和以行人为中心和以汽车为中心两种不同的显示角度的结果如表5 所示。其中在简单明确性中显示方式和显示角度都具有显著性影响(P=0.000 和0.008),在舒适性中显示方式和显示角度都具有显著性影响(P=0.009 和0.033),在熟悉性中显示方式具有显著性影响(P=0.013),但显示角度不具有显著性影响(P=0.551),在一致性中显示方式具有显著性影响(P=0.006),但显示角度不具有显著性影响(P=0.075),在总体评价中显示方式具有显著性影响(P=0.022),但显示角度不具有显著性影响(P=0.135)。
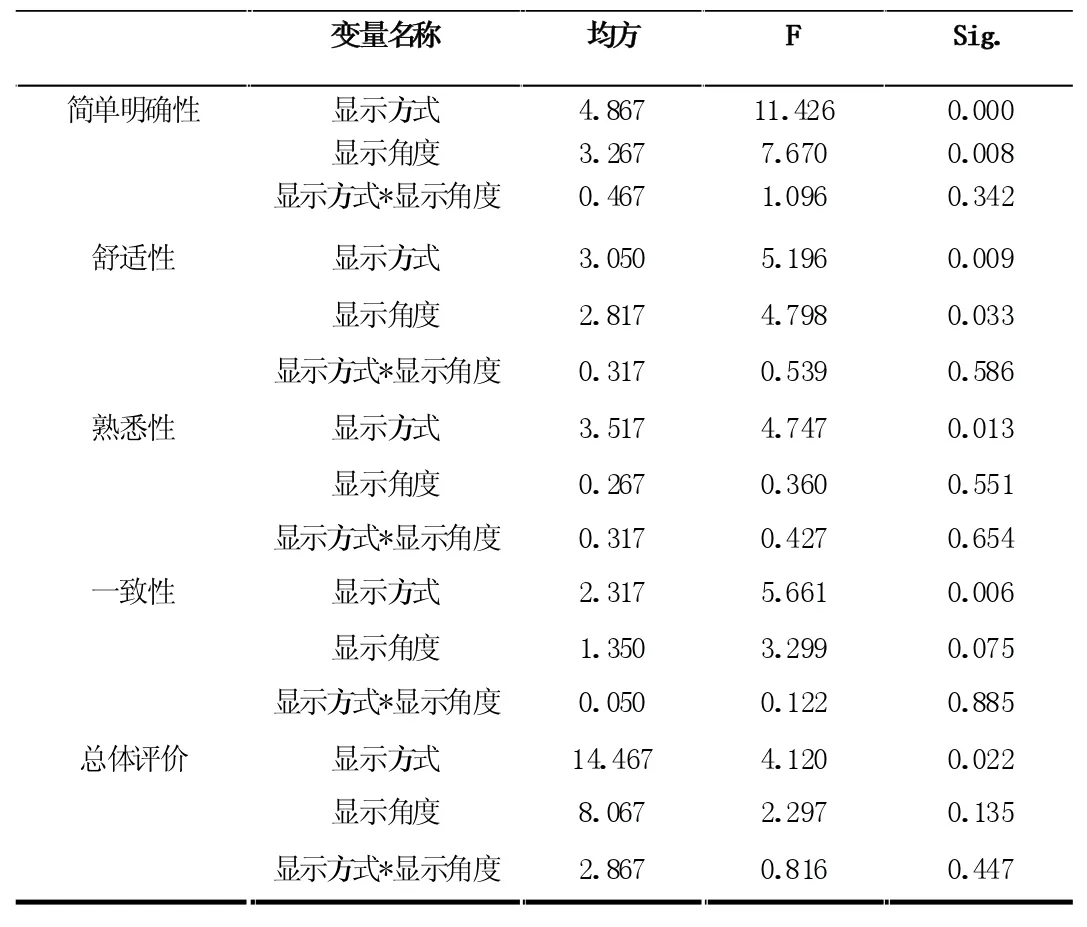
表5 主观评价指标方差分析
3 分析与讨论
本研究通过实验考查了自动驾驶汽车外显界面不同的显示方式以及显示角度对行人过街决策产生的影响以及找出最优外显界面的呈现方式及呈现角度。
根据客观评价指标描述性统计结果可知,以行人为角度的文字的呈现方式效果最好,根据Schubert 的研究可知行人对外显界面提供的信息有一个认识和理解的过程,文字的优势在于语言是人们日常使用的交流工具,外显界面的呈现方式用文字能够起到通俗易懂的作用。以汽车为角度的图案的表现形式效果最差,根据Sucha,M[12]的研究可知呈现的信息为图案时,如果未经学习过含义的模糊性就比较高,并且当交互界面显示的是图案时,行人无法参考先前的经验进行解读,而且以图案这种表现形式来看,行人往往更能理解拟人化的图案,所以以汽车为角度的图案的表现形式效果较差。
从简单明确性、舒适性、熟悉性、总体评价这四个方面来看,根据主观评价指标描述性统计结果可以看出效果最好的为图文结合的显示方式E,这结果与Pavlo Bazilinskyy[13]等人的研究结果一致,这是因为图文结合的显示方式更能给行人清晰、明确的信息,而且简单的图文结合能够让行人更容易明确自动驾驶汽车所传达出的意图;从一致性来看,根据主观评价指标描述性统计结果可以看出效果最好的为文字显示方式B,这和Chang C[10]等人的研究是一致的,是因为B这种显示方式通过外显界面所传达出来的意思和参试者所理解的意思最为相近,直截了当的指明了汽车的意图。从简单明确性、舒适性、一致性、总体评价这四个方面来看,可以看出效果最差的为图案的显示方式D,这结果与Stefanie M.Fass[14]等人的研究结果一致,光给出一个图案对于行人来说并不是很好理解,反而会导致行人做出错误的判断,最理想的呈现信息为汽车状态+意图;从熟悉性来看,可以看出效果最差的为图案的显示方式C,这是因为参试者在生活中对这种图案并不常见,导致在实验的时候对此图案感到比较陌生,并且很难理解这个图案所传达出来的信息。
根据客观评价指标方差分析结果可知,A 和B 这两种显示方式都与D 和F 这两种显示方式存在显著性影响,根据Beggiato[15]的研究可知单独放图案或者用图文结合的方式时会增加会使得行人很难理解外显界面所传递出来的意图并且增加行人的认知负荷,而且文字信息不需要刻意去学习,能更明确的传达车辆的意图,且更具有说服力,也能让行人感觉更加安全,并且研究者常常仅使用文字信息向行人传达车辆状态,因此行人在面对文字时的通过率是高于图案的。C这种显示方式与D这种显示方式存在显著性影响,由于图案是根据研究者们的设计而人为后期赋予的,行人在实验前并没有学习过此类图案的含义,因此此类界面的可理解性和清晰性需要通过培训才能被提高,E 显示方式与F 显示方式也存在显著性影响,根据蒋倩妮[9]的研究可知向行人传达过街指导或建议信息,支持行人过街决策,相比于车辆的状态和意图信息,在人车交互的过程中更适合呈现行人的建议信息。
根据主观评价指标方差分析可以知道从熟悉性、一致性、总体评价这三个方面来看显示角度对行人过街决策并没有显著影响。从黎兰平[8]等人的研究可以知道,外显界面呈现内容对颜色有很大的影响,也就是外显界面的显示内容在色彩设计时应该与当前的交通系统一致,比如指示行人可以通行时应设置为绿色的内容,而禁止行人通行时则应设置为红色的内容,以免造成行人的困惑;根据Strawderman,L.J[11]的研究可知在设计图案时应该用交通系统中常见的图形,比如斑马线或者绿色的步行的行人等,这样能够更准确的传达信息,由于参试者对于本实验中从两个呈现角度设计的图案都比较陌生,在未提前经过培训的情况下很难理解,这样就会导致参试者在实验过程中对这两种图案所传达的意思产生理解偏差。
本研究还存在一定的局限性:(1)本次实验只进行了文字、图案、图文结合三种显示方式去实验,未来还可以考虑加入比如拟人化表情、仿声学等方式去进行实验;(2)本实验是在真实场地进行的,在行人处于或接近车辆轨迹时为了保证行人的安全,车辆必须停止,且出于道德标准实验车辆不能包含任何不屈服车辆,未来可以在模拟平台上可以整合不屈服车辆进行实验。
4 结论
本次实验探究了自动驾驶汽车外显界面对行人过街决策的影响,结果表明:
4.1 在主观评价指标中最好的呈现方式为图文结合,角度为站在行人角度,也就是E 这种表现形式;效果最差的呈现方式为图案,角度为站在汽车的角度,也就是D。
4.2 在客观评价指标中最好的呈现方式为B,最差的呈现方式为D。
实验结果可以为未来自动驾驶汽车外显界面的设计提供参考, 未来自动驾驶汽车外显界面可以设计成文字或者图文结合的表现形式,这样更能方便行人去理解自动驾驶汽车所传递出的意图,最好不要用图案这种表现形式,因为行人对于这种表现形式的理解最差。未来研究方向:本次实验做的为单人单车的实验,未来可以考虑进行单人多车、多人多车的实验。
