基于Mirauge3D 软件的倾斜摄影实景三维建模技术研究
2022-03-09董继宏
董继宏
(三和数码测绘地理信息技术有限公司,甘肃 天水 741000)
近年来,随着相机重量减轻、相机分辨率提高、无人机续航时间增加、定位精度不断提高等[1-3],无人机摄影测量发展速度迅速提升,无人机摄影测量技术已经与生活息息相关。比如国土调查项目、农经权项目、国土资源普查项目、房屋立面改造项目、农村房地一体登记颁证项目、实景三维中国项目等,都采用了摄影测量技术[4-7],而且摄影方式由垂直摄影变为倾斜摄影,获取的影像分辨率更高、影像质量更高。然而倾斜摄影一般要求航向、旁向重叠度为80%,航飞高度一般在千米之下,通常搭载5镜头获取影像数据[8-9]。这样一来,获取的影像较传统垂直摄影来说,不但数量增加了很多,而且角度也是非常大的,这为数据解算带来了挑战[10]。本文在分析了倾斜摄影的特点后,对参与解算的数据进行了预处理,然后以实际生产项目为例,采用Mirauge3D 软件进行空三解算和实景三维模型生产。利用检测点对模型精度进行检测,结果表明:采用本文的方法,首先对数据进行预处理,然后进行空三解算,不但在一定程度上提升了空三解算的效率,而且空三解算的成功率也有了一定的提升,并且基于该空三生产的模型精度可以达到4.5cm,可以满足1:500 地形图生产需求,为大比例尺地形图生产提供了切实可行的方案。
1 倾斜摄影技术概述
主要从倾斜摄影的概念和原理、建模流程和软件进行简单介绍。
1.1 倾斜摄影测量技术
倾斜摄影是指在飞行平台上挂载多镜头相机,从空中对地面进行多角度、全方位、高分辨率影像数据采集。飞行平台通常是有人机、无人机等,目前主要以无人机为主。多镜头相机主要有2 镜头摇摆相机、3 镜头相机、5 镜头相机甚至更多镜头,这里以5 镜头为例对多镜头的组成进行讲解。5 镜头相机由1 个下视相机和4 个侧视相机,通常侧视相机与下视相机夹角为45度。航空摄影测量中,相机焦距、飞机飞行的相对航高、相机的像元大小和地面影像分辨率满足以下关系:
H=f*GSD/a(1)
其中,H 是相对航高,即飞机距离地面的高度,在航线规划时已经规划好的,单位为m;f 是相机焦距,在相机选择后,其焦距基本上是一个定值,单位为mm;GSD 是获取的影像地面分辨率,该值主要根据项目要求进行设置,单位为m;a 是像元大小,相机选择后,该值不会再发生改变,单位为mm。通过式(1)可以看出,当相机被选定后,即f 和a 是固定值,地面影像的分辨率GSD 只和相对航高H 有关。在倾斜摄影时,当下视镜头完全垂直于地面,记其航高为H下,则侧视镜头与地面呈45 度夹角。由直角三角形可知,此时侧视镜头中心到侧视影像中心的距离H侧为H下的1.4 倍,而航高和地面分辨率在数值上成正相关,这样一来,H侧获取的影像分辨率在数值上是H下的1.4 倍。当要获取1.5cm 的下视影像时,如果侧视焦距和下视焦距相同,则获取的影像分辨率是2.1cm,无法满足需求,因此需要对焦距进行调整。假设下视焦距是35mm,通过式(1)可知,将侧视焦距调整至50mm,这样就可以获取分辨率一致的影像。
1.2 倾斜摄影建模流程
倾斜摄影建模主要包括外业和内业,外业工作内容有:测区的勘察与资料收集、航线规划、像控点点位选址与喷涂、像控点测量、无人机航空摄影任务实施、航摄质量检查、成果整理与提交;内业工作内容有:对外业提交的成果进行整理备份、数据预处理、工程创建与完善、空中三角测量解算、像控点转刺与平差、实景三维模型生产等,其主要流程如图1 所示。
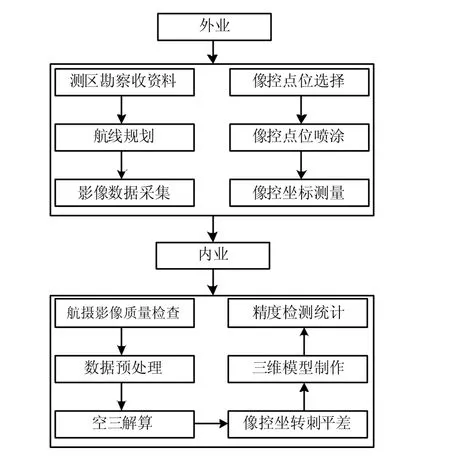
图1 倾斜摄影建模流程
1.3 倾斜摄影建模软件
倾斜摄影建模软件是针对倾斜摄影数据解算而开发的软件,目前常见的有ContextCapture、Photo Mesh、PhotoScan、瞰景Smart3D、大疆智图、dp-Smart、Mirauge3D 等。在本文中,将使用Mirauge3D 软件进行空三解算和实景三维模型的生产。
2 数据预处理
在分析了倾斜摄影的特点后,针对倾斜摄影数据,提出以下几方面的优化。
2.1 降低参与运算的影像数量
倾斜摄影因为是5 镜头,且重叠度高,因此其影像冗余度很大。通过分析可知,当垂直镜头能够覆盖任务区边缘时,存在某个镜头拍摄的影像在任务区范围线外,这样的影像对后期数据建模是无用的,因此这类影像是没必要使用的。通过分析航向和5 镜头之间的相对关系,可以很容易得到任务线范围外的影像,对这部分影像进行剔除,可以降低影像冗余度,提高数据的解算速度。
2.2 解决POS 与影像不对应的问题
传统的垂直摄影测量,一张有效影像对应一个有效POS,在倾斜摄影中,增加了侧视镜头,但并没增加记录侧视镜头的POS 装置,这样使得POS 和影像无法一一对应。在倾斜摄影中,记录的1 组POS 是下视镜头的POS。在数据解算的过程中,利用下视POS 来代替侧视镜头的POS,虽然下视POS 和侧视镜头的真实POS 相差不大,但是毕竟不准确,对后期数据解算的成功率和精度都有一定的影响。以下视镜头POS 和平台检校参数可以解算得到侧视镜头对应的POS 数据。通过利用Matlab语言进行代码编写,对POS 数据进行解算,得到侧视影像对应的唯一坐标值。
2.3 均衡影像质量
由于5 镜头进光角度和进光量不同,所以5 镜头影像一般都存在一定的色差,这为后期数据的准确解算带来了影响。在分析了5 镜头影像的特点后,采用PhotoShop 软件,对每个镜头的某一幅地物丰富、对比度高的影像进行参数调整,使其不同波段的值尽量符合正态分布,然后将调整的参数记录下来。通过创建动作,对其余影像进行自动批处理,从而提升影像的质量,图2 是处理前的RGB 的色阶分布图,图3 是处理后的RGB色阶分布图。通过图2 和图3 可以看出,在对影像进行一系列参数调整后,其色阶图有了明显的变化,调整后的色阶图更符合正态分布。

图2 处理前的RGB 色阶分布图
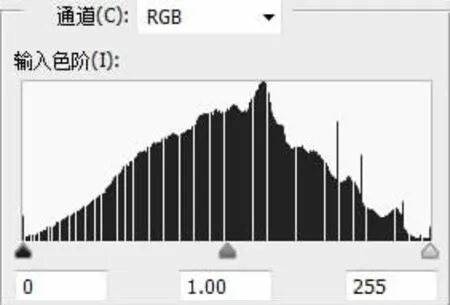
图3 处理后的色阶分布图
3 实际案例
3.1 测区勘察与资料收集
本次实验数据来源于河湖确权项目,长约15km,宽约100m,测区地形起伏较大。已有数据为国土三调遥感影像数据,主要用来作为工作底图。
3.2 像控点布设与采集
由于是带状区域,且宽度才100 米,采用对称式布点,明显需要布设加密点多,因此在布点时,采用两侧交叉布点的方案。所谓交叉布点,就是指两侧点位的连线与范围线的长边夹角基本上呈一个小的锐角或者一个大的钝角,而不是在90 度左右。按照1km 一个点,交叉共布设32 个像控点,在精度薄弱区域布设10 个检测点。采用GPS-RTK 进行像控点坐标采集,在采集前,采用红白油漆进行点位喷涂,如图4 所示,然后仪器对中整平,当状态为“固定解”时进行采集,每个点位采集5 次,然后取均值作为最终的测量成果。

图4 喷涂的像控点点位标志
3.3 航线规划
使用地面站软件对航线进行规划,设置航向重叠度为85%,旁向重叠度为80%,确保在距离地面近地点处获得的影像能够满足航飞重叠度要求。影像地面分辨率最低为5cm,最高为3.5cm,沿着河流走向进行航线敷设。因为河流宽度较窄,所以只规划了3 条航线,这样在保证作业效率的前提下,也保证了数据解算的成功率,因为一条或2 条航线在空三解算时,失败率非常高。
3.4 影像数据获取
航线规划好后,将任务上传给飞行控制中心,飞行控制中心根据上传的任务进行影像数据采集。在无人机正式起飞前,需要对无人机进行检查,主要对安装固定、电池电量和储存卡是否能够正常读写进行检查,在确保一切满足航飞要求后进行升空采集影像。在采集的过程中,时刻通过地面站对航飞状态进行观察,确保飞行状态时刻是受控的。在影像数据获取后,对影像数据的质量进行快速检查,确保航飞提交到内业的成果是可正常使用解算的。
3.5 数据预处理
数据预处理主要包括剔除冗余无效影像、解决POS 不对应问题和提升影像质量。在本次作业中,剔除了1452 张影像,剔除率约为15%。利用Matlab 编写开发小程序,对POS 不对应问题进行处理。以下视镜头为标准,结合相机检校平台,对侧视镜头POS 进行解算,解算后所有影像都有唯一的POS 与之对应。利用PhotoShop 软件对影像进行统一调色,提升影像整体质量。
3.6 空三解算
为了验证本文的预处理环节对后续的空三解算有效,在本次数据解算环节,用预处理前后的数据进行空三解算,结果如下:3.6.1 利用Mirauge3D 软件对预处理前的数据进行空三解算,解算耗时14h,通过人机交互方式对空三成果进行查看,空三呈现弯曲状态,解算报告中加密点重投影中误差为0.61pixel,虽然没有超限,但是空三弯曲,理论上来说,成果是不可用的。当然,这种情况有时可通过控制点进行平差纠正。3.6.2 利用Mirauge3D 软件对预处理后的数据进行空三解算,解算耗时11.3h,通过人机交互方式查看空三成果,空三成果基本上符合实际地形,且POS 基本上在一个平面上,符合航摄状态,空三成果可用。查看空三解算报告可知,其加密点重投影中误差为0.48pixel,精度满足相关规范要求,且比处理前的空三精度略高。
3.7 像控点转刺平差
对上述两个空三成果均进行像控点和检测点的转刺,转刺原则按照能看见的,不被遮挡的均进行转刺,然后进行平差,平差结果如下:3.7.1 预处理前的空三通过平差后,其状态由曲变平,空三成果可用,平差耗时1.2h,平差后的像控点精度为0.021m,检测点精度为0.045m,成果均满足规范要求。3.7.2 预处理后的空三平差完成后,其耗时0.7h,平差后的像控点精度为0.013m,检测点精度为0.027m,成果均满足规范要求。较3.7.1的结果,其空三精度高,转刺像控点、检查点、平差均耗时短,所以表明预处理提升了空三的平差效率和空三成果精度。
3.8 三维模型制作
基于3.7 中平差后的空三成果进行模型生产,结合电脑配置,设置相同的框架坐标系统、瓦片大小和原点坐标,导入同一任务区范围线进行模型生产。通过对建模时间进行统计,②较①建模耗时减少了10%,对于小面积来说,相差不大,但是对于大面积数据建模,这个比例是非常可观的。通过人机交互的方式对模型进行查看,特别是范围线边缘的模型。从模型精细度、结构、纹理等方面进行查看,两个空三生产的模型基本上相同,表明剔除影像并没有对建模效果带来影响。
4 精度统计与分析
采用10 个检测点对两组最终的模型成果精度进行人机交互式检测,检测结果如表1。

表1 检测点精度检测统计表单位:cm
采用平均值来代替中误差,对表1 结果进行计算,①的模型中误差为5.3cm,②的模型中误差为4.5cm,两组模型精度均能够满足1:500 地形图精度需求,但是整体来说,②的精度更高,成果更可靠,也表明通过预处理,提升了后期模型的精度。
5 模型存在的问题及解决方案
本次生产数据主要是河流,因此存在一个主要的问题是模型水域存在空洞,纹理未映射上,如图5 所示。

图5 模型水域部分成果图
通过图5 可以看出,模型破损主要位于水域部分,这是因为水域属于特征不明显区域,也就是通常说的弱纹理区域。因为水面非常相似,即使提出少量的特征点,在后期平差纠正的时候,也会因为相似度极高,而被作为错误点进行剔除,使得水域部分加密点极少,甚至没有加密点。
针对上述问题,提出以下两种修补水面的方案:
5.1 利用范围线进行约束建模
首先生产得到水域模型,然后在测图软件中,采集得到水域的边界线和高程,然后通过格式转换,转换为建模软件认可的kml 文件,最后将该文件导入建模软件中,对水域部分进行约束建模。
5.2 借助修模软件进行修模
利用武汉天际航的DP 或智觉空间的SVS 进行水域部分模型的修补。首先删除水域边界线内破损的模型,然后对空洞进行填充。通过空三成果,对水域部分的纹理进行自动映射,当映射效果不能满足要求时,采集需要修改的区域,联动PS 软件进行纹理贴图的修饰,最后重新映射至模型上,这样就可以得到符合要求的水域模型了。
结束语
本文首先结合倾斜摄影的特点,对影像进行了一系列的预处理,然后采用对比分析的方法,对预处理前后的数据分别进行空三解算和模型生产,结果表明:通过预处理,数据解算效率、空三解算通过率和成果精度均有了一定的提升,且模型质量并没有降低。对于空三解算效率低、空三通过率低、建模效率低等问题均有一定的指导和借鉴意义,可以为同行作业人员提供有效参考,提升倾斜数据解算质量。
