光伏组件故障诊断技术综述
2022-03-07孙建民李庚达段震清胡文森
孙建民,梁 凌,李庚达,段震清,胡文森
(国家能源集团新能源技术研究院有限公司,北京 102209)
0 引言
随着煤炭、石油等化石能源的不断消耗及环境问题的日益加剧,新能源发电现已成为当前世界范围内能源替代与电力供应的主要形式。太阳能发电作为一种清洁、环保的新能源发电方式,近年来得到广泛应用,其中,光伏发电的发展尤为迅猛。我国光伏电站的装机规模逐年递增,截至2019年底,光伏发电装机容量已累计达到204.3 GW。
在我国,光伏电站的建设通常优先选择太阳能资源优良的西北部地区,但该类地区多为荒漠、高原、戈壁等环境较为恶劣的区域,这样的环境条件会对光伏组件产生不利影响,大幅增加其发生故障的概率;且这类地区的人口密度偏低,导致光伏电站存在运维困难和运维周期长的问题,严重影响整个光伏电站的发电量。
光伏组件的运行寿命一般为25~30年,但受运行环境条件恶劣等因素的影响,其运行寿命将大打折扣。据统计,处于不同地区、不同环境条件下的光伏电站的年均输出功率衰减介于0.6%~1.0%之间,这极大影响了整个光伏电站的发电能力[1]。因此,如何保证光伏电站的最大输出功率,对光伏电站的运维提出了巨大挑战。
在光伏电站的运维过程中,光伏组件的故障诊断方法已成为其关键技术,也是助力光伏电站精细化运维管控、提高光伏发电系统能效的重点研究方向。本文根据当前光伏组件故障诊断研究方向的不同,将光伏组件故障诊断方法分为:基于电路结构的光伏组件故障诊断方法、基于I-V输出特性曲线的光伏组件故障诊断方法、基于红外图像检测的光伏组件故障诊断方法、基于数学模型的光伏组件故障诊断方法和基于智能算法的光伏组件故障诊断方法这5类[2-4],然后对这5类光伏组件故障诊断方法的相关研究进行全面介绍,并对每类方法在实际应用时的优、缺点进行分析比较。
1 基于电路结构的光伏组件故障诊断方法
与正常的光伏组件或光伏组串相比,存在故障的光伏组件或光伏组串的电流或电压会发生明显的变化。针对此特性,可以给采用不同电路结构的光伏阵列中的光伏组串配置对应的传感器,从而可对光伏组件进行检测,实现对故障光伏组件的定位[5-6]。
利用传感器进行检测是最直接的基于电路结构的光伏组件故障诊断方法,但若是光伏电站的装机规模较大,所需的传感器数量会较多,整体投资成本将显著增加。因此,在改变光伏阵列电路结构的同时减少传感器的数量是当前该类光伏组件故障诊断方法的研究重点[7-8]。
通常,光伏阵列的电路结构为SP结构,即多个光伏组件先串联成光伏组串后,再将光伏组串并联。文献[9]提出了一种基于SP结构的光伏组件故障诊断方法,该方法是依据光伏组件电压的变化来确定光伏组件发生故障的范围,以实现故障光伏组件的定位。以1个如图1所示的“8×3”的光伏阵列为例,对该基于SP结构的光伏组件故障诊断方法进行描述:首先依据每条光伏组串的电流(即图1中的I1、I2、I3)确定故障光伏组串,然后再将每条光伏组串中的2个电压传感器的值(即图1中的V1和V4、V2和V5、V3和V6)分别与其所在光伏组串的电压值U的进行比较,从而逐步判断出故障光伏组件的位置。

图1 基于SP结构的光伏组件故障诊断方法的实例Fig.1 Examples of PV modules fault diagnosis method based on SP structure
文献[10]在上述研究的基础上提出重构拓扑结构,在每条光伏组串中均安装电流传感器,并利用所测得的电流数据进行初步检测,这样可提高故障光伏组件的定位精度。文献[11]在基于SP结构的基础上对光伏阵列进行分区域评估,利用各区域的电压数据差异来确定故障光伏组件的范围。基于SP结构的光伏组件故障诊断方法能实现可靠、精准的故障光伏组件定位,增加传感器数量可进一步提升光伏组件故障诊断的精确度,但投资成本也会随之明显增加。因此,在保证光伏电站发电收益的前提下,各光伏电站可根据自身情况确定适宜的光伏组件故障诊断的精确度。
当光伏阵列的电路结构采用TCT结构时,其是先将N块光伏组件并联,然后再串联连接,采用该结构的光伏阵列主要是利用电流传感器来进行光伏组件故障诊断。与基于SP结构的光伏组件故障诊断方法相比,基于TCT结构的光伏组件故障诊断方法较大程度地减少了电流传感器的数量,降低了检测成本。文献[12]在TCT结构基础上构建CTCT结构,并提出了一种基于CTCT结构的新的光伏组件故障诊断方法,该诊断方法是在光伏组件串联时在每2排光伏组件之间增加m层电流传感器,依据每层电流传感器的显示数值来确定故障光伏组件的位置。
虽然基于TCT结构的光伏组件故障诊断方法已较大程度地减少了电流传感器的数量,但其采用的电流传感器的数量依然较多。因此,文献[13]将TCT结构与SP结构结合构成CTCT结构,并提出了一种基于CTCT结构的新的光伏组件故障诊断方法。该诊断方法具体为:光伏阵列中,每排光伏组串由N个光伏组件串联,排与排之间并联;然后每相邻L个光伏组件设置1个电流传感器,电流传感器数量为;将每排光伏组串视为1条SP结构的分支,并设置1个电压传感器。该诊断方法是先测出整条分支电路的总电压和总电流,由电压传感器确定故障发生的具体排数,然后再利用电流传感器确定对应排数中故障光伏组件所在区域的范围。随着光伏阵列的数量增加,相对于基于TCT结构的光伏组件故障诊断方法,该基于CTCT结构的光伏组件故障诊断方法采用的传感器数量可减少20%~50%。
以上几种光伏组件故障诊断方法均只能实现故障光伏组件的定位,并不能判断光伏组件的故障类型。基于此,文献[14]提出了基于SN-TCT结构的光伏组件故障诊断方法,该诊断方法将每排光伏组串理论的电压、电流信息与实测的电压、电流信息进行对比,可将故障光伏组件的定位范围缩小到一定程度,然后采用复合信息融合算法结合实测的光伏组串电压、电流信息,利用概率分布函数判断出故障光伏组件的位置。该诊断方法的优点在于结合了环境信息与传感器信息,增加了故障模式的识别能力,提高了故障定位的准确率。
通过查阅相关文献发现,大部分基于电路结构的光伏组件故障诊断方法可实现对断路这种故障类型的定位,极少数可实现对阴影故障类型的识别,而且由于需要重新加装传感器的问题,基于电路结构的光伏组件故障诊断方法目前仅适合应用于装机规模较小的光伏电站[15]。对于装机规模较大的光伏电站而言,该类光伏组件故障诊断方法的检测方法复杂,使用的传感器数量较多、成本较高,并且装机规模较大的光伏电站的电路结构已确定,若对电路结构进行改造,则改造成本较大,因此,基于电路结构的光伏组件故障诊断方法的实用性较差。
综上所述,当前基于电路结构的光伏组件故障诊断方法发展的关键和重点研究方向是在保证检测精确度的前提下减少传感器的使用数量,降低传感器投资成本;并在结合大数据的情况下,实现光伏组件故障类型的判定[16-17]。
2 基于I-V输出特性曲线的光伏组件故障诊断方法
通过分析标准测试条件(STC)下,处于正常状态与处于故障状态的光伏组件的I-V输出特性曲线(如图2所示),以及光伏组件工作温度为25 ℃时,不同太阳辐照度下光伏组件的I-V与P-V输出特性曲线(如图3所示)发现,这2种输出特性曲线均呈现出有规律的变化。针对此光伏组件输出特性曲线规律,可根据光伏组件在不同故障状态和不同环境条件下的电压、电流、最大功率点等各项指标进行故障类型的分析和判断;也可通过对比实测光伏组件性能得到的实际输出特性曲线与利用光伏组件出厂参数模拟得到的理论输出特性曲线进行对比分析,以此来判断光伏阵列中是否存在故障光伏组件。
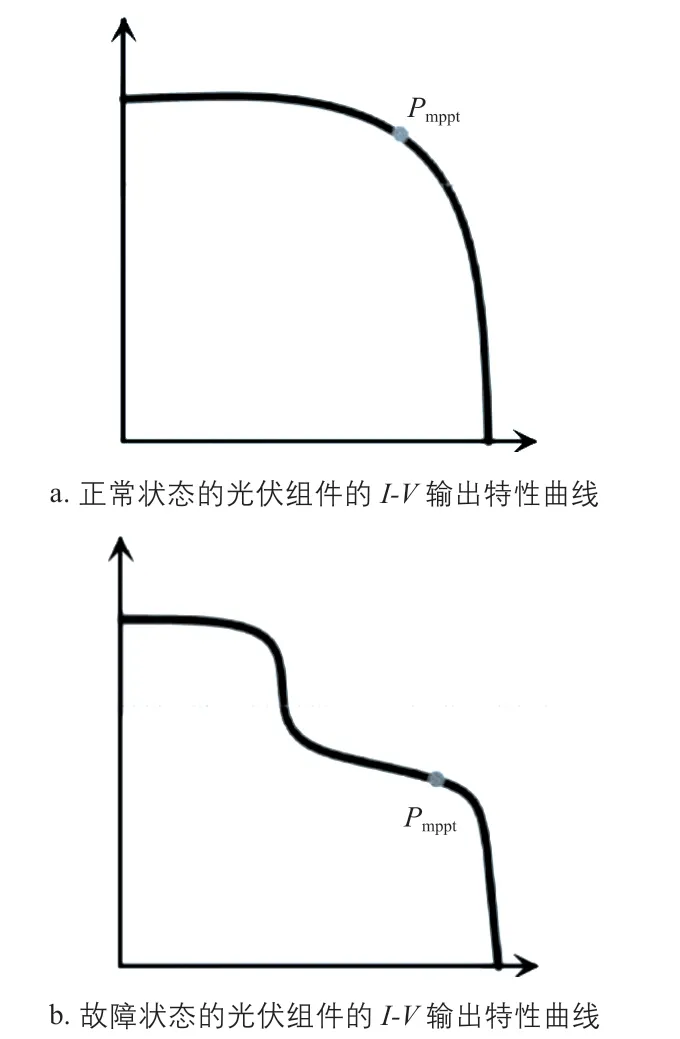
图2 STC下处于正常状态与故障状态的光伏组件的I-V输出特性曲线Fig.2 I-V output characteristic curve of PV modules in normal state and fault state under STC
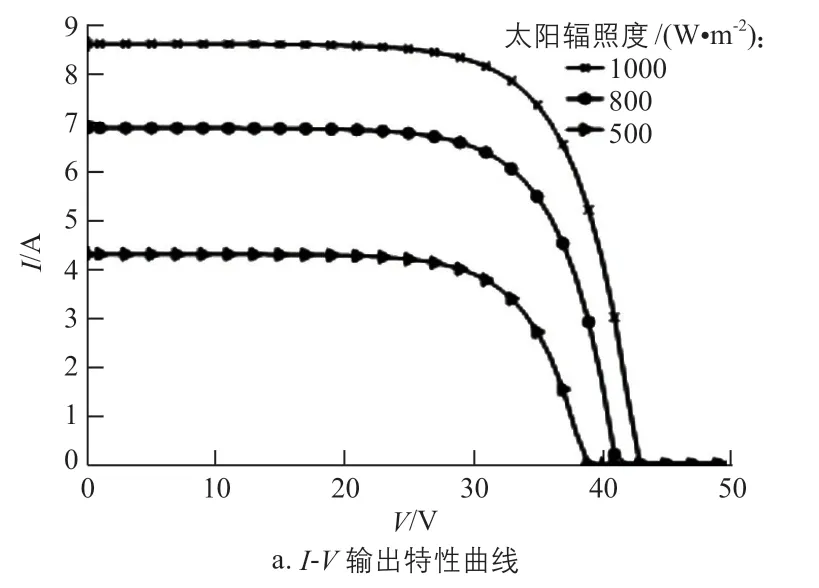
图3 光伏组件工作温度为25 ℃时,不同太阳辐照度下光伏组件的I-V、P-V输出特性曲线Fig.3 I-V and P-V output characteristic curves of PV module under different solar irradiance when working temperature of PV module is 25 ℃
从光伏组件的I-V、P-V输出特性曲线能直接获取其最大输出功率、最大功率点电压、最大功率点电流、短路电流和开路电压等多个参数,依据光伏组件故障特性对这些参数进行整合,可得到对光伏组件故障更加敏感的特征参数。文献[18]基于光伏组件I-V输出特性曲线的形状,获取了光伏组件的热等效电压、曲线拐点因子、最大功率点因子、等效串联电阻和填充因子这5个故障诊断指标,以这5个故障诊断指标针对不同光伏组件故障类型呈现出的不同敏感程度作为判断基准,将经过规范处理(即数据归一化)后的指标采用模糊分类的方法进行分类,对分类后的结果进行打分并设定阈值,从而实现光伏组件故障类型的判断及分类。从光伏组件I-V输出特性曲线获取数据并处理后,可据此较为容易地对不同的光伏组件故障类型进行相应的判断,在经过参数指标对光伏组件故障类型的合理评估后,择优选取适合的阈值,并以此精确判定光伏组件故障的分类结果。
可结合多个参数对基于I-V输出特性曲线的光伏组件故障诊断方法进行研究分析。文献[19]提出了一种基于功率损失与I-V输出特性曲线的光伏组件故障诊断方法。该诊断方法首先确定光伏组串理论上的功率损失,然后依据光伏组串的实际功率损失来判断其是否存在异常,再依据光伏组串电压的变化量来判断光伏组串的短路位置及短路光伏组件的个数,最后依据光伏组串的填充因子判断光伏组件是否存在老化故障,从而完成对光伏组件故障类型的诊断。
文献[20]提出了一种基于编码的光伏组件故障快速诊断模型,用于模拟不同故障类型下光伏组件的I-V输出特性曲线,以光伏组件实测值与理论值之间的最小误差作为目标函数,建立优化目标函数,利用DE算法辨识出光伏组件故障最优参数,可较为准确地定位故障光伏组件并识别其故障类型。
由于光伏组件对环境的敏感度较高,因此将环境因素作为光伏组件性能的影响因素并结合光伏组件的I-V输出特性曲线可进一步判断光伏组件的工作状态。文献[21]将光伏组件I-V输出特性曲线与光伏组件的工作温度,以及环境温度、太阳辐照度等环境数据相结合,可较为全面地描述光伏组件的工作状态,进一步提高了光伏组件故障诊断的精确度。
基于I-V输出特性曲线的光伏组件故障诊断方法的优点是其对于故障特征参数的获取较为便利,且故障特征参数的信息量较大,对于故障类型的鉴别及判定较为容易[22-23]。但基于I-V输出特性曲线的光伏组件故障诊断方法也存在以下缺点:一方面,该类故障诊断方法不能确定故障发生的具体位置,且能够识别的故障类型也十分有限;另一方面,该类故障诊断方法无法得到故障程度的量化指标,如部分阴影遮挡的程度、串联电阻的增加值和短路光伏组串的数量等,而这些量化指标有助于运维人员采集故障信息并进行故障光伏组件的批量处理。
3 基于红外图像检测的光伏组件故障诊断方法
基于红外图像检测的光伏组件故障诊断方法的优势在于利用红外图像能够定位到故障光伏组件的具体位置,且不需要获取光伏组串的特性参数,利用计算机进行图像分析即可进行光伏组件的故障诊断。但是该故障诊断方法具有一定的局限性:1)需要确保光伏组件是运行在环境稳定的状态下;2)若光伏组件工作温度受环境温度的影响较大时,光伏组件发生故障时其工作温度的波动将不是特别明显,所以无法根据红外图像中光伏组件的表面温度来判断光伏组件故障类型。以上原因极大限制了基于红外图像检测的光伏组件故障诊断方法的应用。
但随着红外热成像探头的不断升级,对于光伏组件工作温度的测定有了进一步的提升,利用红外图像对光伏组件进行故障诊断的技术也趋于完善[24]。
不同工作状态下的光伏组件内部太阳电池呈现的温度特性也不同,光伏组件的工作温度T可表示为:

式中:为 太阳电池对太阳光线的有效吸收率;S为太阳常数值;Γ为光伏阵列法线与光伏阵列太阳连线之间的夹角;为有效的正面半球向外的太阳辐射率;εHB为北面半球向外的太阳辐射率;σ为史蒂芬-玻尔兹曼常数。
在太阳电池发生故障时,其所发电能会转化为热能,导致太阳电池的工作温度发生变化,异常太阳电池的工作温度Tdes与正常太阳电池的工作温度Tnor之间的关系可表示为:

式中:L1为光照强度;η为正常太阳电池的实际光电转换效率。
根据式(2),当η=15%时,Tdes可表示为:

根据式(2),当η=30%时,Tdes可表示为:

由式(3)和式(4)可知,太阳电池的光电转换效率在提升的同时,一旦太阳电池发生异常,光伏组件的工作温度也会随之升高,所以利用红外图像能够直观反应出光伏组件的状态,这也是可以利用红外图像检测识别发生故障的光伏组件的最根本原因[25-27]。
文献[28]提出了利用红外图像检测来分析光伏阵列的工作状态。对得到的红外图像进行分析预处理,在考虑风力、环境温度和太阳辐照度等诸多环境因素的影响后,再结合气象和电气等各类信息,采用IF-ELSE模糊推理的方法实现了对光伏阵列中光伏组件运行状态的诊断,并依据诊断效果对红外探头的性能提出了要求,明确了高分辨率的红外探头对光伏组件故障类型的识别具有促进作用。
除了可以检测热斑故障,基于红外图像检测的光伏组件故障诊断方法也可根据因不同外部原因造成光伏组件故障时其红外图像产生的颜色变化来进行光伏组件故障类型检测。文献[29]提出了基于近红外图像的硅太阳电池故障检测,利用近红外电荷耦合器件(CCD)设备拍摄太阳电池通电后的红外图像信息,通过红外图像识别技术,针对不同的故障提出不同的算法,能较好地检测出隐裂、碎片等光伏组件外在故障;而且由于算法较为简单,因此该故障诊断方法的检测效率较高。但受限于设备性能,该故障诊断方法对于造成热斑的光伏组件内在缺陷无法进行正确识别。
文献[30]提出了利用CCD设备配合红外设备拍摄红外图像光伏组件,采用形态学转换技术对拍摄到的红外图像信息进行处理后,使用Canny边缘算法对存在缺陷的光伏组件进行检测的方法。该方法对红外图像的分割采用热像素种子算法,对输入的红外图像进行预处理、高斯滤波和直方图均衡化后,依据所得到的种子像素进行最小距离偏差计算,并根据最小距离偏差是否超过阈值来判定光伏组件的故障点。通过该方法可同时检测到光伏组件内在、外在故障,且检测质量得到了极大提高。
文献[31]在利用红外图像分析光伏组件热斑现象的同时,对光伏组件中太阳电池的破碎、焊带的断裂也进行了研究,以不同故障类型光伏组件的红外图像呈现的颜色不同为依据进行光伏组件故障类型的判定。此方法依据红外图像可直接进行光伏组件故障类型的分类,但该文献未对光伏组件故障类型的自动分类进行探究。
将红外图像信息转化为数字信息也可进一步提升光伏组件故障诊断的效果。文献[32]利用卷积神经网络成功对光伏组件红外图像进行编码,依据图像中不同颜色等级对应的数值,实现了对单块光伏组件中太阳电池工作状态的识别,从而完成了光伏组件的故障诊断。该方法同时利用脉冲神经网络实现了对太阳电池处于工作状态时的时序信息的学习,且能够实现理想的光伏组件故障预警效果。
文献[33]将红外图像转换为色相、饱和度和强度(HSI)的颜色空间,并通过k-means聚类算法对(A,B)、(LAB)这2个颜色通道的颜色空间进行进一步分割,从突出的红外图像色素区提取时域特征,从而可对背板分层、EVA膜气泡、太阳电池蜗牛纹这3类光伏组件故障进行鉴别。
综上所述可知,红外图像检测对于光伏组件故障类型的检测主要针对太阳电池破碎等外在故障和热斑等存在较大温度变化的内在故障,而对于其他故障,如光伏组件短路等光伏组件工作温度变化较小的故障的检测效果则较差[34]。另一方面,基于红外图像检测的光伏组件故障诊断方法主要依赖于图像识别技术,因此对于探测设备探头分辨率等的要求较高;其次,图像的预处理对于图像识别技术也尤为重要,可为光伏组件故障类型的进一步识别与故障处理等奠定基础;最后,图像识别技术受环境因素的影响较大,其对于单一的环境信息的要求较高。但由于目前光伏电站的建设环境都较为复杂,因此,提高图像的预处理能力、红外热成像探头的识别精度都是基于红外图像检测进行光伏组件故障诊断的发展方向[35]。
4 基于数学模型的光伏组件故障诊断方法
随着计算机技术与测试技术的发展,在掌握相关技术原理的前提下通过建立光伏组件数学模型,并利用软件进行仿真来诊断光伏组件的工作状态,可作为一类光伏组件故障诊断方法。
光伏组件的等效电路图如图4所示,图中:Iph为光伏组件的光生电流;RL为光伏组件的等效外负载;Rs为光伏组件的等效串联电阻;Rsh为光伏组件的等效并联电阻;V为光伏组件输出端的端口电压;I为光伏组件输出端的端口电流。
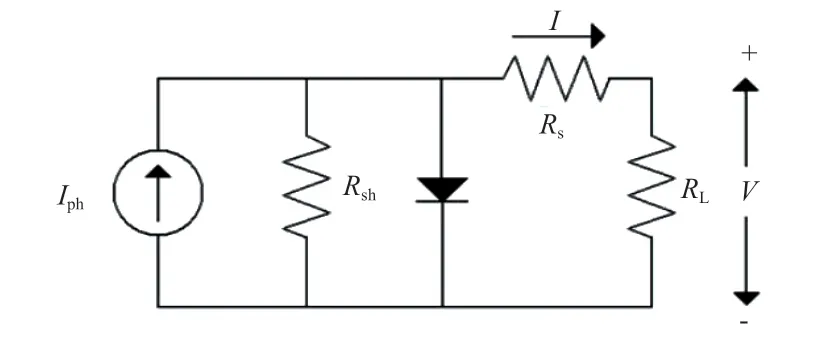
图4 光伏组件的等效电路图Fig.4 Equivalent circuit diagram of PV module
图中各参数之间的关系式可表示为:

式中:I0为二极管的反向饱和电流;n为二极管的理想因子;q为电子电荷,取值为1.602×10-19C。
所有的光伏组件数学模型均依据图3及式(5)来推导,进而进行仿真与分析[36]。基于数学模型的光伏组件故障诊断方法是对光伏组件真实情况的初步理论判断,该方法的优势在于能较为理想的对光伏组件的故障类型进行识别,从机理上判断故障发生的原因,在进一步优化的情况下,根据得到的实际数据可进行较为精确地判断,且检测成本较低、需提取的数据种类较少,便于实际的光伏组件故障类型的分析[37-38]。
文献[39]提出了一种基于参数拟合方法的光伏组件等效电路模型,利用单二极管等效电路模型,推导出光伏组件各性能参数的数学表达式,再利用人工鱼群算法对参数进行辨识,采用最小二乘法对参数不断优化拟合,使该光伏组件数学模型的精确度不断提高,从而可满足光伏组件故障诊断的要求。文献[40]提出了使用Simulink模型对光伏组件的特征进行模拟,然后将模拟数据与实测数据进行比较,若某性能参数数值的误差较大,则可据此判定该光伏组件发生了故障。该方法的关键点在于输入数据的准确性,缺点是对于环境条件产生的影响考虑较少。
由于模型的环境变动性,不同研究建立的模型也会有所差别。文献[41]针对阴影对光伏组件的遮挡程度进行等级划分,并依据划分的等级分别对模型参数进行修正,修正后的模型可实现大部分因阴影遮挡造成的光伏组件故障的仿真,进一步为光伏组件的故障诊断提供了理论模型。文献[42]提出了一种在光伏组件等效电路模型的基础上计算光伏阵列等效串联电阻的数学模型,依据正常工作及存在异常这2种状态下的光伏阵列等效串联电阻值的变化,可进一步分析出光伏组件的故障类型。
基于数学模型的光伏组件故障诊断方法的研究时间较长,但由于不同的环境条件会使光伏组件故障研究的侧重点不同,因此每个研究所建立的模型针对环境条件都具有唯一性,较难适用于其他环境条件。从目前的文献分析来看,基于数学模型的光伏组件故障诊断方法能检测出的故障类型非常有限,且也较难判别故障光伏组件的位置,具有一定的局限性;而且为了提高光伏组件故障诊断的精确度,建立模型后,故障诊断需与神经网络和聚类算法相结合,因此光伏组件数学模型的精确度是此类故障诊断方法诊断结果精确度的基础条件。
5 基于智能算法的光伏组件故障诊断方法
基于智能算法的光伏组件故障诊断方法采用的智能算法主要分为2大类:一类是基于模糊理论算法,由于该算法的模糊隶属函数与模糊规则尚不成熟,因此利用该智能算法对光伏组件进行故障诊断尚处于初步研究阶段[43-44];另一类是基于神经网络算法。神经网络是一种通过模仿动物神经网络的行为特征,进行分布式并行信息处理的数学模型。神经网络的优势在于利用复杂的关系模型能够解决多种输入与输出之间的非线性联系,从而实现对参数的识别与判定,在现如今大数据、数据挖掘技术的催化下,其能够得到不断学习,从而提高识别的准确性[45]。
目前,BP神经网络因具有适应性高、自学能力强的特点而被广泛使用,但BP神经网络的收敛速度较慢,容易陷入局部极小值点。基于此原因,各研究学者不断对BP神经网络进行改进,在寻优方面进行了重点研究。文献[46]提出了基于BP神经网络的光伏组件故障诊断方法,该方法利用布谷鸟算法的寻优特性有效解决了BP神经网络寻优差的缺点,提高了故障诊断的精确度和检测速度。
由于BP神经网络的特性及其在参数识别方面的缺陷,文献[47]提出了改进型的基于径向基(RBF)神经网络的光伏阵列故障类型识别算法,在确定隐含层中心的同时,采用粒子群优化算法对RBF神经网络光伏阵列故障诊断模型进行自适应权重寻优,避免陷入局部最优,最终提升了神经网络的泛化能力与收敛速度,使光伏组件故障诊断的精确度得到进一步提升。
神经网络对于光伏组件故障特征参数的要求较高,数据在能够反映故障特性的前提下进行大量训练是提高光伏组件故障诊断精确度的唯一方式。文献[48]基于深度挖掘技术,结合天气参数等气象信息,利用多方数据间的相关性确定了光伏组件故障特征参数,特征参数经过训练后,提高了光伏组件故障诊断的精确度,且故障影响条件也考虑的较为全面,此故障诊断方法是今后光伏组件级故障诊断技术发展的方向。
文献[49]利用输入参数为太阳辐照度和光伏组件工作温度的神经网络对变工况下的光伏组件电流、电压的输入、输出值进行预测,并与光伏组件实际的电流、电压进行比较后,得出平均绝对误差MAE的值,利用误差率设定误差范围,以此来判断光伏组件是否存在故障。
文献[50]依据环境温度、相对湿度等气象条件,利用物理混合神经网络,首先对光伏组件的输出功率进行在线预测,将得到的光伏组件输出功率预测值与光伏组件的实际输出功率进行对比,并确定一级警告阈值;再与其邻近光伏组件的输出功率实际值进行对比,确定二级警告阈值;最后根据不同级别的警告阀值实现对光伏组件故障程度的判定。但该方法对于具体的光伏组件故障类型还无法进行识别。
基于神经网络算法的光伏组件故障诊断方法的主要实施思路分为网络的训练与实测这2个部分。此方法的关键点是需要大量的数据对神经网络进行不断地训练,才能得到某一特定场合下的诊断网络,因此,神经网络对光伏组件故障诊断结果的准确度对数据的数量级有一定的依赖性,数量级越大,神经网络的适用性越强,因此数据的长期收集对于神经网络的诊断准确度至关重要[51-52]。其次,神经网络算法的适用性较弱,训练后的神经网络需要依据时间、地点、季节和环境温度等环境条件随时做出修改才能保证神经网络与实际环境条件的一致性,进而提高神经网络判断的准确度。随着大量光伏电站的建设,各种环境条件下皆产生了大量数据,这为基于神经网络算法的光伏组件故障诊断方法的广泛应用提供了数据支撑[53-54]。
6 光伏组件故障诊断方法的展望
6.1 光伏组件故障诊断方法小结
对本文提到的5类光伏组件故障诊断方法进行总结,不同故障诊断方法的优、缺点如表1所示。
在综合分析光伏组件安装条件、环境影响、故障诊断方法的特点及检测成本等情况后,针对不同光伏发电项目的情况,可依据不同光伏组件故障诊断方法的优、缺点进行选取。

表1 不同光伏组件故障诊断方法的优、缺点Table 1 Advantages and disadvantages of different PV modules fault diagnosis methods
1)基于电路结构的光伏组件故障诊断方法的检测结果较为准确,但其精确度的提升是以提高投资成本为代价,因此是否使用基于电路结构的光伏组件故障诊断方法,需要依据光伏阵列的电路结构所需传感器的数量进行判断。
2)基于I-V输出特性曲线的光伏组件故障诊断方法对于数据的获取较为方便,但数据获取的前提是光伏组件数据来源的定位,尤其是针对大型光伏电站,光伏组件级的故障诊断目前尚无法实现,但随着交直流载波技术的逐渐成熟,该方法的优势也将逐渐显现。
3)基于数学模型的光伏组件故障诊断方法和基于智能算法的光伏组件故障诊断方法对于环境的依赖性较强,尤其是基于智能算法的光伏组件故障诊断方法,对于特定环境数据的数据量的要求较高,其依赖性更强。但随着大数据、人工智能技术的不断升级,基于智能算法的光伏组件故障诊断方法在有特定需要时可以依据环境随时做出调整。
4)针对大型光伏电站,各类光伏组件故障诊断方法的诊断级别中,除了基于红外图像检测的光伏组件故障诊断方法以外,其他光伏组件故障诊断方法的故障诊断级别仅能达到光伏组串级。但随着技术的不断提高,各类光伏组件故障诊断方法的识别精度也将逐渐提高。
6.2 展望
依据未来智能光伏电站的建设要求,实现“无人值守,少人值班”的可能性需要建立在算法智能化、设备智能化、人工智能化、传输智能化等方面的基础上,随着智能化技术的不断进步,光伏组件故障诊断方法也需要不断升级,这不仅是对光伏组件故障诊断领域的研究提出了更高要求,更是对整个光伏运维行业提出了更高要求。基于上述几种光伏组件故障诊断方法诊断特点的分析,对光伏组件故障诊断技术的发展趋势进行预测。
未来,基于电路结构的光伏组件故障诊断方法的发展趋势为:一方面,要找到采用传感器数量最小的光伏阵列电路结构;另一方面,需要与智能算法相结合,从增加传感器检测的物理层面与数据分析及诊断的理论层面这2个方向进行故障光伏组件的定位和诊断,此类诊断方法是未来智能光伏电站建设的决策性因素[14,55]。
对算法的自学习、自适应性提出一定要求,使算法能够在任何智能光伏电站评价中准确发挥出其作用是智能算法的一大研究趋势。为了提高光伏电站的运维效率并降低运维工作量,实现精细化运维管理,故障诊断级别达到光伏组件级也是未来光伏组件故障诊断技术发展的热门方向。
7 结论
本文对基于电路结构的光伏组件故障诊断方法、基于I-V输出特性曲线的光伏组件故障诊断方法、基于红外图象检测的光伏组件故障诊断方法、基于数学模型的光伏组件故障诊断方法和基于智能算法的光伏组件故障诊断方法进行了全面介绍和分析比较,并对光伏组件故障诊断技术未来的发展趋势进行了展望。光伏组件故障诊断方法的选择需要在综合分析光伏组件安装条件、环境影响、故障诊断方式特点及检测成本等情况后,针对不同光伏电站的情况,依据不同光伏组件故障诊断方法的优、缺点进行选取。随着未来光伏电站智能化技术的不断进步,光伏组件故障诊断方法也将不断升级。