基于QD与MEMS振镜的微纳激光通信终端伺服技术研究
2022-03-07陈韵于笑楠江伦张家齐佟首峰
陈韵,于笑楠,江伦,张家齐,佟首峰
(长春理工大学 光电工程学院,长春 130022)
近年来,随着空间激光通信技术的不断发展,其在全球通信应用中的需求也愈发迫切[1-2]。由于微纳卫星具有重量轻、体积小、成本低、研制周期短的特点,使其在空间激光通信领域展现出良好的应用前景[3]。依据国外微纳卫星平台振动功率谱分析,近距离激光链路波束宽度为毫弧度量级,平台在中高频范围内所引起的微弧度量级振动可忽略不计[4]。为了抑制卫星平台振动以建立稳定的激光链路,瞄准捕获跟踪(APT)系统是关键。
由于微纳卫星自身体积功耗有限,无法搭载大质量、高功耗的通信终端,需选用微纳器件作为激光通信终端的APT系统。APT系统主要由综合控制单元、光学天线、伺服瞄准机构及光敏位置探测单元等组成。为了实现高精度、大视场、小体积、低功耗的APT系统,伺服瞄准机构与光敏位置探测单元是关键。四象限探测器以其响应速度快、灵敏度高和宽光谱范围等特点,通常被选用作为精跟踪光敏位置探测单元来确定光斑质心[5]。MEMS振镜凭借其转动范围大、响应速率快、执行精度高、体积小的优势,是目前伺服瞄准机构中比较理想的驱动元件。对于精跟踪光斑探测器,其跟踪视场受到跟踪检测分辨率、天空背景光和捕获时间等因素限制。为了减小捕获时间,提高捕获概率,应尽量增加跟踪视场角。当接收信标光斑较小时,不但对跟踪视场角的要求降低,而且小光斑的光束能量更为集中,更利于探测器的检测,增加跟踪精度[6-8]。
本文首先从不同光斑大小对跟踪精度影响入手,研究了其理论基础,分析了光斑大小对四象限探测器跟踪精度的影响,并根据实际系统分析了高斯模式的光斑,针对小光斑对QD跟踪通信系统的影响,设计了一种小光斑捕获跟踪算法,并考虑系统的小型化、工程化的要求,设计了一套基于QD和MEMS振镜伺服通信一体化系统的微纳激光通信终端,进行了捕跟实验验证,并给出了相应实验结果。
1 光斑检测精度分析
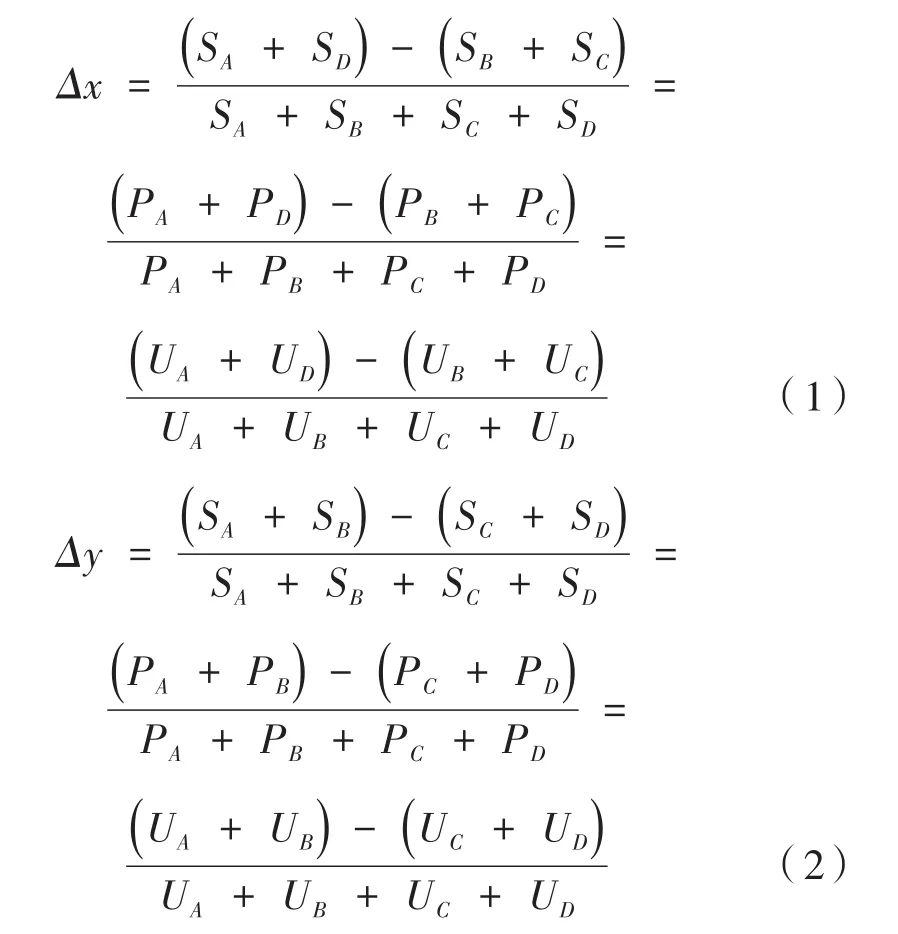
四象限探测器可看作四个性能相同的光电二极管,并按照四个象限的形式要求排列而成的光电探测器件[9]。照射到探测器靶面上的光斑被分成四个部分,其面积记为SA、SB、SC、SD。面积大小与四个象限接收的光功率PA、PB、PC、PD以及四象限输出的电压UA、UB、UC、UD成正比。一般采用光斑质心算法判别光斑中心[10-11]。
如图1所示,以QD的中心为坐标原点,十字沟道作为坐标轴建立直角坐标系,外圆为四象限探测器的感光靶面,R为其半径;内圆为光源光斑,r为其半径,O为四个象限的坐标原点,O′(x0,y0)为光斑中心的实际位置。
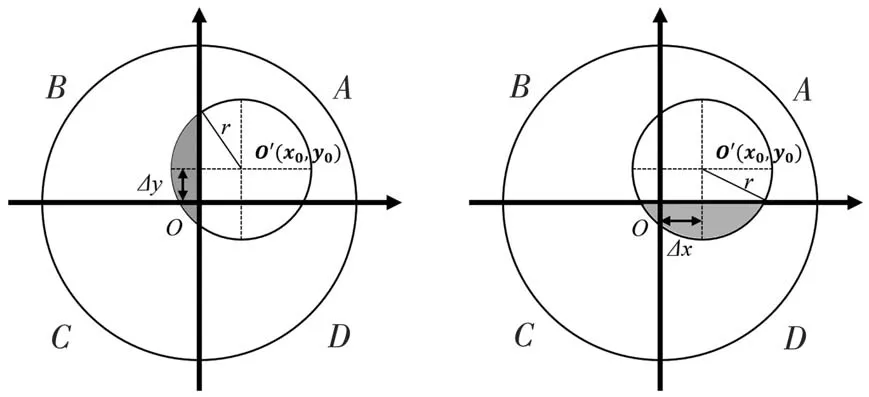
图1 光斑与QD靶面位置示意图
设Δx、Δy分别为横向和纵向的脱靶量,则脱靶量、光斑分布面积、四个象限接收光功率以及四个象限输出的电压关系为:
式中,I(x,y)为坐标(x,y)处的光强;I0为峰值光强;ω为光束半径。由上式可知当单位峰值光强I0一定时,光束束腰半径与光斑强度呈正比。
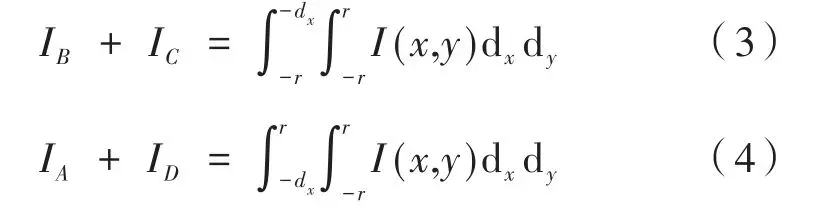
在实际应用中激光光源照射到四象限探测器光敏面上的光斑光强分布可视为高斯分布,一、三象限输出的光电流与二、四象限输出的光电流为:
因此光斑质心所在位置的x坐标Dx为:
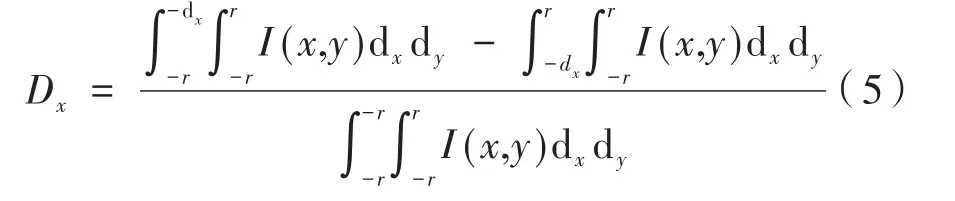
由上式可知探测器所得位置横坐标Dx与坐标(x,y)所在处光强I(x,y)有一定关系。利用Matlab进行光斑强度与四象限探测器理论计算偏移量关系的数值仿真,设感光靶面半径R=4,光斑半径r=1,单位峰值光强I0,通过束腰半径表征光斑强度,分别选择束腰半径ω=0.5、1、2、3,可得其理论计算偏移量和实际偏移量的关系曲线如图2所示。
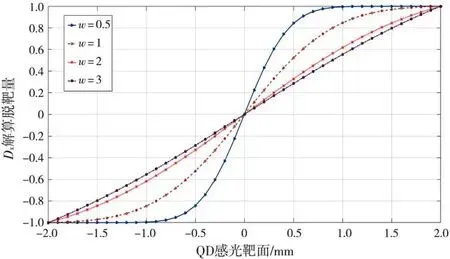
图2 光斑强度与探测灵敏度Matlab仿真曲线
由关系曲线可知,随着光斑的束腰半径增大,光斑脱靶量与实际偏移量越来越接近,曲线斜率随着光斑束腰半径的增大而减小。随着高斯光斑束腰半径的减小,理论计算偏移量与实际偏移量的关系曲线斜率越来越大,即四象限探测器的灵敏度增大。
2 系统组成与算法设计
2.1 系统组成
激光通信载荷主要由综合控制分系统、收/发光学分系统、APT分系统组成,可完成全双工通信跟踪功能,其光学架构与伺服系统结构如图3所示。APT分系统由四象限探测器、模拟/数字(A/D)转换、数字/模拟(D/A)转换、振镜驱动单元、MEMS振镜等单元组成。四象限探测器使用800 nm红外波段QA4000型号,选用808/850 nm波段激光器作为发射光源。伺服执行机构选用MEMS振镜,靶面直径为5 mm,最大偏转角度为±5°,16位分辨率。综合控制单元采用ARM公司的STM32F103芯片作为主控单元,确保系统的稳定工作。通过QD+MEMS振镜的组合实现伺服通信一体化设计,最大程度上减小了激光通信载荷的体积功耗,载荷体积为98 mm×98 mm×60 mm,质量为622 g,稳态功耗5.5 W。整机设计视场50 mrad,捕获不确定区域20 mrad,发射束散角5 mrad,QA4000探测器靶面直径4 mm,到达探测器靶面光斑直径为1 mm。
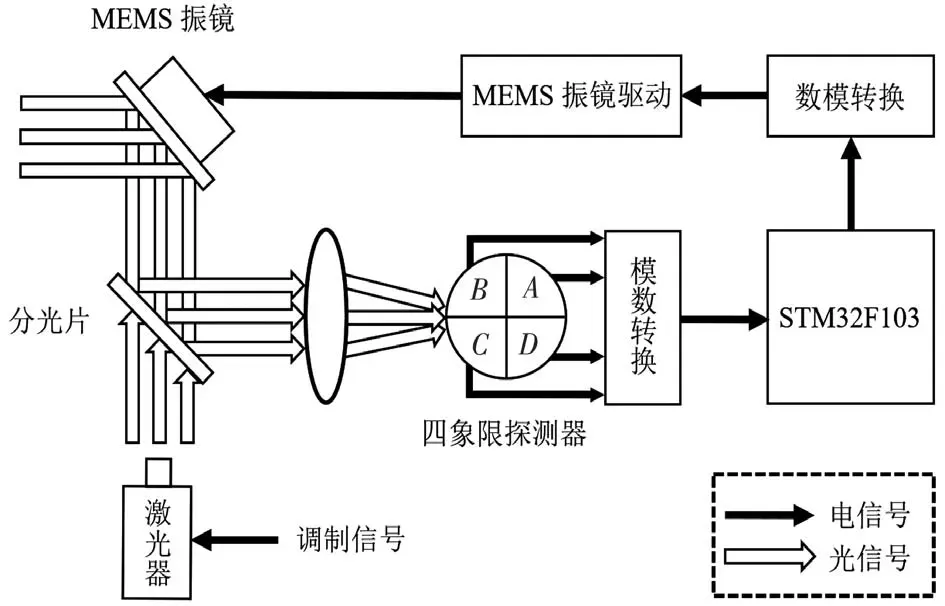
图3 微纳激光通信终端光学架构与伺服系统结构示意图
2.2 捕获跟踪算法设计
依据仿真结果,在选择光斑大小时,既要考虑QD的检测灵敏度,又要兼顾其动态跟踪范围。实际应用时,一般选择光斑大小为QD光敏面尺寸的一半,具有较高的检测灵敏度和较宽的动态检测范围。但是由于缩小光斑半径对提高QD探测灵敏度有较大影响,拟采用减小光斑半径的方法提高QD探测灵敏度。此时光斑能量在QD视场内分布情况如图4所示,并据图4中的3种能量分布情况设计了光斑半径小于四分之一探测器靶面时的捕获算法。
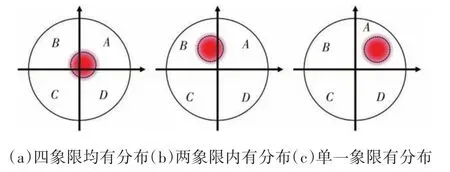
图4 QD视场内光斑能量分布情况示意图
微纳卫星激光通信终端光电跟瞄系统的捕获跟踪算法首先采用凝视-扫描的全光捕获方式,再利用QD跟踪通信复合探测技术,完成整个捕获跟踪过程。在光端机光轴实现初始指向以后,跟踪振镜在目标不确定区域内进行矩形螺旋扫描,逐渐缩小不确定区域范围,直到目标进入跟踪视场建立光闭环链路。捕获算法逻辑框图如图5所示。
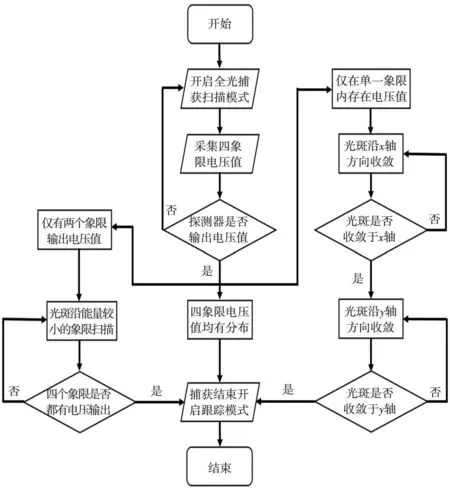
图5 捕获算法流程框图
根据式(1)、式(2)计算结果可知,若通过Δx、Δy来控制光斑维持在QD靶心位置,需满足光斑在四个象限均有分布的条件。首先,根据QD输出电压值大小判断视场内光斑能量分布情况,当QD四象限均有电压值输出时,说明光斑能量在四个象限均有分布,此时直接依据解算的脱靶量Δx、Δy大小控制伺服执行机构完成光束跟踪;当QD仅有两个象限输出电压值时,说明光斑能量分布于两个象限之间,此时控制伺服振镜使光斑沿着能量较低的两个象限方向扫描,直至4个象限都出现电压输出,此时完成光斑捕获,开启光束跟踪模式;当QD仅有一个象限输出电压值时,说明光斑能量仅位于单一象限,此时控制伺服振镜使光斑沿x轴方向扫描直至两个象限都有电压输出,然后依据第二种情况的处理方式完成光斑捕获。
3 实验
3.1 激光通信实验平台
搭建室内激光通信实验系统测试微纳激光通信终端跟踪功能,实验示意图如图6所示,实验实物图如图7所示,激光通信载荷搭载于二维精密云台上,通过云台调整方位俯仰方向以模拟卫星平台粗指向功能。通过计算机模拟星务计算机与激光通信载荷通信,向通信载荷发送捕获跟踪指令并接收QD脱靶量信息完成激光通信载荷工作状态的实时监测。
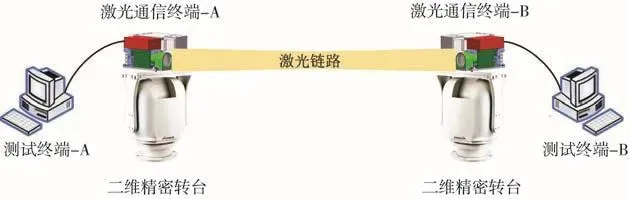
图6 跟踪实验示意图
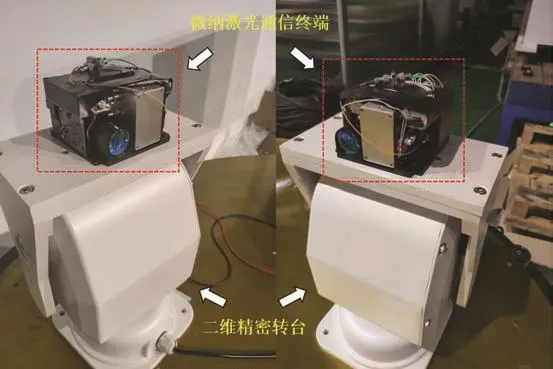
图7 微纳激光通信终端捕获跟踪测试实物图
3.2 捕获跟踪实验
通过底部的二维精密云台模拟粗指向功能,两端的微纳激光通信终端使用MEMS振镜完成粗精复合系统对光斑进行跟踪,图8显示了闭环跟踪过程中MEMS振镜x轴、y轴执行量的变化以及QD解算的脱靶量变化曲线。图8和图9中横轴为实验时间采样点,采样间隔10 ms,图8纵轴为MEMS振镜的x、y轴执行偏转角,图9纵轴为QD解算的脱靶量值。图中1 870 ms与3 140 ms处的两次阶跃响应曲线推测为两端激光载荷开启跟踪模式的时刻不同所导致的,由图可知伺服系统执行开始至完成捕获用时2.2 s。
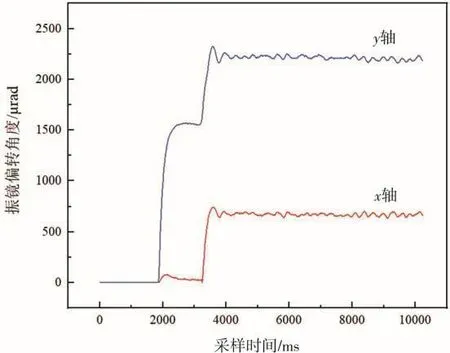
图8 闭环跟踪过程振镜执行量
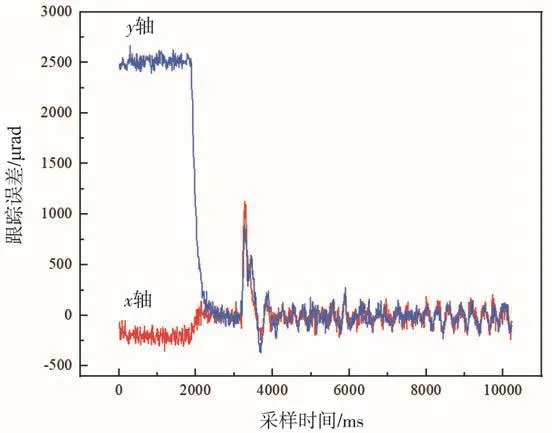
图9 光斑脱靶量变化曲线
待完成光斑捕获后,开启跟踪模式,得到系统跟踪曲线。图10给出了伺服振镜在跟踪状态下x轴与y轴的执行量,图11—图12给出了跟踪状态下QD解算跟踪误差曲线。图10—图12中,横轴均为实验时间采样点,采样间隔10 ms,图10纵轴为MEMS振镜的x、y轴执行偏转角,图11—图12纵轴为QD解算的脱靶量值。
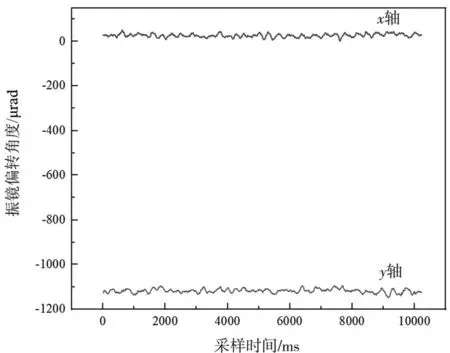
图10 跟踪状态MEMS振镜x、y轴执行角度
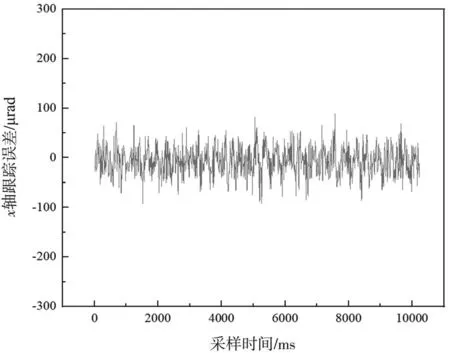
图11 跟踪状态x轴QD解算脱靶量
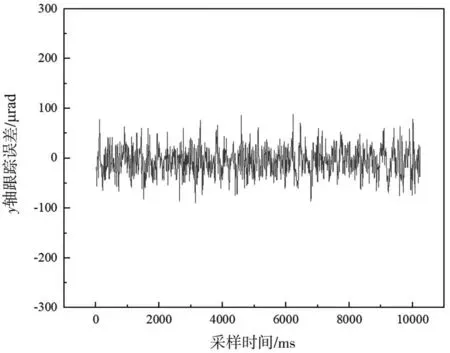
图12 跟踪状态y轴QD解算脱靶量
对图11、12光斑脱靶量进行数据统计,得到统计柱状图,如图13所示。由图可知x轴跟踪误差为83.892 μrad(3σ),y轴跟踪误差为83.520 μrad(3σ)。
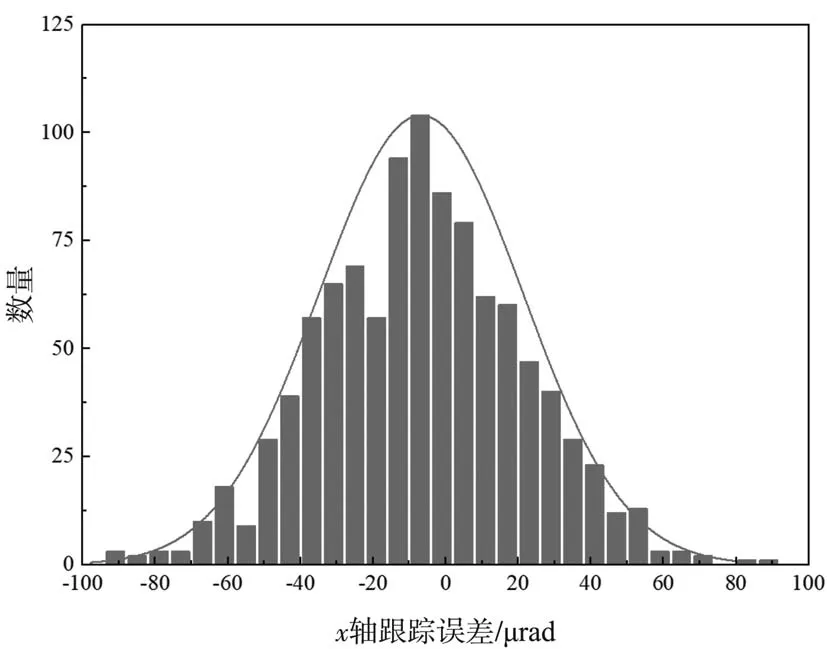
图13 跟踪模式下x轴QD解算脱靶量数据统计直方图
室内实验结果表明基于QD与MEMS振镜的大视场小光斑的捕获跟踪算法可以实现稳定跟踪,伺服系统运行良好,能够保证激光通信链路的稳定性。
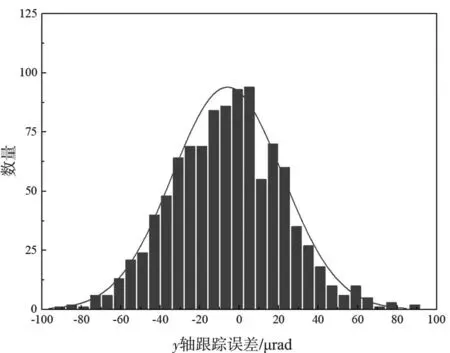
图14 跟踪模式下y轴QD解算脱靶量数据统计直方图
4 结论
根据四象限探测器在空间激光通信跟踪通信一体化的特点,设计了一套基于QD与MEMS振镜为结构的微纳激光通信终端,完成了全双工全光捕获跟踪实验。主要工作完成如下:(1)以QD与MEMS振镜为伺服系统搭建了两套微纳激光通信终端,整机体积98 mm×98 mm×60 mm,质量622 g;(2)设计了一套大视场、高精度的小光斑捕获跟踪算法;(3)以STM32作为主控单元,完成脱靶量解算与伺服控制;(4)搭建激光通信实验平台,完成全光捕获跟踪实验与跟踪误差分析,捕获时间2.2 s,跟踪误差84 μrad。
