基于自适应动量估计优化器与空变最小熵准则的SAR图像船舶目标自聚焦算法
2022-03-05李志远郭嘉逸张月婷黄丽佳吴一戎
李志远 郭嘉逸* 张月婷 黄丽佳 李 洁 吴一戎
①(中国科学院空天信息创新研究院 北京 100190)
②(中国科学院空间信息处理与应用系统技术重点实验室 北京 100190)
③(中国科学院大学电子电气与通信工程学院 北京 100049)
1 引言
合成孔径雷达(Synthetic Aperture Radar,SAR)作为一种主动式航天航空遥感手段,具有全天时全天候的工作特点,获得的图像能够反映目标的微波散射特性,在灾害监测、地质测绘、海洋观测、资源勘查、目标侦察等众多领域具有广泛的应用[1–5]。船舶目标监测是海洋观测领域中一个重点研究方向,而船舶目标散焦是影响船舶目标监测精度的一个重要原因。导致SAR图像船舶目标散焦的原因有很多,船舶运动是其中一个重要因素。在SAR成像过程中,航行中的船舶目标由于自身运动产生了额外的多普勒频移,导致其方位向多普勒调频率失配,使最终船舶图像发生散焦现象[6,7]。这种散焦现象多发生于高分辨率的SAR图像中。近年来,SAR成像算法和成像系统不断发展,可获得的SAR图像的分辨率也在不断提高,纵观国际高分辨率商业SAR卫星系统,最高方位向分辨率已优于0.3 m[8]。随着高分辨率SAR图像的广泛应用,为实现对SAR图像船舶目标的正确解译和精确检测,针对SAR图像船舶目标散焦问题的研究显得越来越重要。
子孔径相关法(Map Drift,MD)[9]是一种经典的SAR图像自聚焦算法,它将SAR图像分解为子孔径图像,通过对子孔径图像进行互相关来估计多普勒调频率,从而实现对二次相位误差的校正。MD算法能够很好地实现对图像二次相位误差的校正,但无法补偿高阶相位误差。在MD算法的基础上,Mancill等人[10]提出了多孔径相关法(Multiple Aperture Map drift,MAM),以实现对高阶相位误差的估计。然而在MAM算法中,由子孔径偏移量到相位误差系数的投影矩阵冗余量大,因此算法复杂度过高,实用性下降。对此侯育星等人[11]提出了一种稳健的MAM算法,通过对投影矩阵进行优化,极大地降低了算法复杂度,并提出使用对比度法确定待补偿相位误差的阶数以及求解运动误差过大时产生的模糊问题。但是,随着子孔径数目的增长,子孔径图像的信噪比(Signal-to-Noise Ratio,SNR)下降,算法的性能也会受到影响。相位梯度自聚焦算法(Phase Gradient Autofocus,PGA)[12]也是一种应用广泛的自聚焦算法,可以实现对高阶相位误差的估计。但此算法依赖特显点的选取,在SNR较低或场景缺少特显点的情况下,该算法效果不佳。还有一些算法通过优化对比度[13],图像熵[14,15]等图像质量指标来实现SAR图像自聚焦。这类方法不依赖特显点的选取,不受限于某种特定的成像模式,能够实现对高阶相位误差的补偿,然而随其相位误差模型阶次的升高,此类算法的复杂度也会上升。
在高分辨率SAR图像中,运动是造成船舶目标散焦的重要原因。船舶在海面上的运动状态非常复杂,船上各散射源的多普勒历程不尽相同,存在SAR图像船舶目标相位误差沿距离向空变的情况(下文将此类SAR图像船舶目标简称为空变散焦船舶目标)。上述几种自聚焦算法均基于传统的空不变假设,即所有散射源具有相同的相位误差,因此无法直接将其应用于此类空变散焦船舶目标的自聚焦。
在处理此类空变相位误差问题时,传统算法通常会采取分块处理的方式实现自聚焦[16]。借鉴这一思想,本文提出了一种基于自适应动量估计[17](Adaptive Momentum Estimation,Adam)优化器和空变最小熵(Space-Variant Minimum Entropy,SVME)准则的SAR图像船舶目标自聚焦算法(下文简称为基于Adam优化器的空变最小熵自聚焦算法)。本算法结合SAR的成像机制和图像的几何性质,可以对任意阶相位误差进行补偿,实现了空变散焦船舶目标的自聚焦。本文的创新性主要体现在:在优化子图像熵时,结合图像熵函数关于相位误差系数梯度的1阶矩和2阶矩,加快和提升了基于图像熵的自聚焦算法在处理空变相位误差问题时的聚焦速度和聚焦效果。
本文余下章节安排如下:第2节分析低频相位误差对SAR图像的影响,介绍不同阶次相位误差与散焦的关系;第3节对本文所提算法进行介绍,包括相位误差建模、空变图像熵准则和Adam优化器的理论分析与使用方法,第4节介绍实验数据、实验环境并对实验结果进行分析,第5节给出结论。
2 低频相位误差对SAR图像的影响
在SAR成像过程中的相位误差可以分为低频相位误差与高频相位误差,其中低频相位误差又可以分为线性(1阶)相位误差,2阶相位误差以及其他高阶相位误差;高频相位误差又可以分为高频正弦相位误差和宽带相位误差[16]。在本文中由船舶运动引入的低频相位误差是造成船舶目标散焦的主要因素;此外,雷达发射的信号多为大时间带宽积信号,在距离向上散焦现象鲜有发生,因此只需分析低频相位误差给图像方位向回波带来的影响。
根据多普勒效应,SAR图像方位向回波可以等效为chirp信号,存在相位误差的点目标方位向回波信号可以表示为

其中,η为方位向时间,Tsar为 合成孔径时间,ka为不存在相位误差时的方位向调频率,Δφη为低频相位误差函数,r ect(·)表示矩形窗函数。根据Taylor定理,可以将相位误差函数展开为如式(2)的多项式形式
其中,αi为 第i阶相位误差系数,它随相位误差阶数的增加逐渐减小。
在大时间带宽积的前提下,根据驻定相位原理,只存在1阶相位误差时,式(1)的频域表达式为

其中,c0为 和1阶相位误差系数α1相 关的常数,fa为方位向频率。式(3)经过匹配滤波后

从式(4)可以看出,此时在频域2次相位误差已被补偿,但存在1次相位误差,根据傅里叶变换的性质,回波信号会在时域发生移位。
根据驻定相位原理,只存在2阶相位误差时,式(1)的频域表达式为
其中,k0为 和2阶相位误差系数α2相关的常数。式(5)经过匹配滤波后

从式(6)可以看出,此时在频域中2次相位未被完全抵消,因此信号存在散焦。
为了进一步分析不同阶次相位误差对回波信号的影响,本文对形如式(1)的点目标方位向回波信号进行了方位压缩仿真实验,结果如图1所示。从图1可以看出,在大时间带宽积的前提下,添加1阶相位误差的信号存在明显的时移现象,添加3阶及以上奇数阶相位误差后的信号主瓣拓宽并产生了明显的不对称旁瓣;添加偶数阶相位误差后的信号存在主瓣展宽、旁瓣升高的现象,其中添加2阶相位误差后的信号主瓣展宽最为明显。综上所述,1阶相位误差会造成信号时移,2阶相位误差是造成信号散焦的主要原因,3阶及以上相位误差对信号散焦也存在一定的影响。

图1 添加不同阶次相位误差时方位回波信号压缩结果Fig.1 The compression results of azimuth echo signal when adding different order phase error
3 基于Adam优化器与空变最小熵准则的自聚焦算法
在实际航行过程中,由于风浪流、海岸、相邻船舶等环境干扰力,惯性力、黏性力等流体动力以及桨舵等船体主动力的作用,船舶本身总是存在旋转运动,因此在雷达合成孔径时间内,船体各处的瞬时速度并不一致,船体上各散射源处相位误差不尽相同。当船舶转动分量占比较大时,船舶各处的线速度差异明显,在成像时船舶目标便可能会出现空变散焦现象,如图2所示。
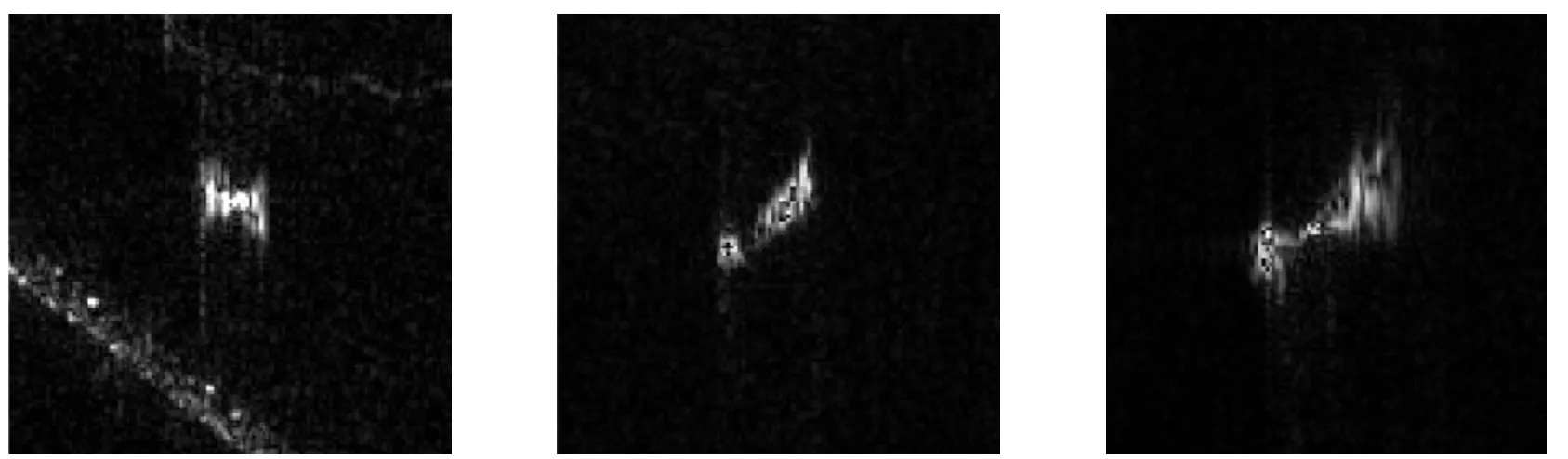
图2 GF-3 空变散焦船舶目标Fig.2 GF-3 space-variant defocused ship target
对于船舶这类非合作目标,通常难以精确地获得其运动状态信息,因此很难通过解析的方法对相位误差进行补偿。本文采用分块迭代优化的方式,使用图像熵作为目标函数,使用Adam优化器对相位误差系数进行估计以实现对SAR图像船舶目标的聚焦。
3.1 相位误差建模
假设信号已经经过距离压缩和距离徙动校正,在距离-多普勒域中,包含相位误差的回波信号可以表示为

其中,s0(τ,fa)表示不含相位误差的距离-多普勒域回波信号,τ表示距离向时间,fa表示方位向频率,φ(fa)表示距离-多普勒域中的相位误差分量,本文使用如式(8)所示的μ阶多项式拟合该相位误差分量

其中,αi(τ)为 第i阶相位误差系数,它是距离向时间τ的函数,自聚焦本质上就是补偿相位误差分量φ(fa)的过程。频域1阶相位误差主要导致其对应的时域图像发生平移,对图像散焦没有贡献,因此在本算法中从2阶相位误差开始进行相位补偿。
3.2 空变最小熵准则
图像熵有多种定义方式[18–20],本算法使用文献[19]中关于图像熵的定义。令I=(xij)m×n表示一幅具有m×n像素的图像,则I的图像熵S可表示为

其中,ρij表示像素xij的能量与图像总能量的比值,C表示图像的总能量。很明显,ρij满足

因此图像熵S≥0。根据拉格朗日乘数法,可以求得当ρij=1/(m·n)时,图像熵S取得最大值,此时图像的能量均匀地分布于每个像素上。当=C时,图像熵S取得最小值0,此时图像的能量最为集中。根据熵的单调性,可知图像熵能够反映图像的聚焦程度,聚焦图像的图像熵要小于该图像散焦时的图像熵。
图像熵具有软叠加性。假设图像沿距离向等分为N个子图像,第u个子图像的图像熵为Su。根据式(9),Su满足

将式(11)乘以第u个子图像能量与图像总能量的比值Cu/C,得到加权后的子图像熵
对所有加权后的子图像熵求和可得
则根据式(13)可以推导得出总图像熵和子图像熵之间满足

其中,pu表示第u个子图像的能量与图像总能量的比值,从式(14)可以看出,总图像熵和子图像熵之间满足线性关系,因此当每个子图像的图像熵都收敛到最小值时,总图像熵也将收敛到最小值。
船舶目标在成像时横跨多个距离门单元,可被视为多个点散射源的叠加。对于存在空变散焦现象的船舶目标而言,船舶速度的变化是连续的,因此可以认为船舶上相邻距离门内各散射源的多普勒历程较为接近。根据图像熵的软叠加性,本算法将图像沿距离向等分为多个子图像,各子图像彼此不重叠;为保持图像本身固有的空间几何结构特征,子图像熵计算区域尺寸均大于子图像自身尺寸,且彼此间存在重叠部分;本算法通过最小化子图像熵实现各子图像的自聚焦,将聚焦后的子图像按照等分时的顺序进行拼接得到最终聚焦图像。作为一种基于图像准则的自聚焦算法,优化图像熵的过程最为耗时,与之相比拼接过程本身并不会明显增加运算时间。
3.3 自适应动量估计优化器
在基于图像准则的自聚焦算法中,需要选用合适的优化算法对相位误差系数进行估计。梯度下降法(Gradient Descent)是经典的凸优化算法,但其存在收敛速度慢,无法实现针对模型各参数的自适应学习率等劣势。动量算法(Momentum)在选择梯度下降路径时结合梯度的1阶矩,积累了历史梯度指数级衰减的移动平均,有效加快了目标函数的优化速度;自适应梯度估计算法(Adaptive Gradient Algorithm,AdaGrad)结合梯度的2阶矩对模型各参数的学习率进行缩放,实现了自适应学习率。在上述两种算法的基础上,Adam算法通过计算梯度的指数移动均值,减弱了历史久远的梯度对当前优化路径选择的影响;通过引入矩估计的指数衰减速率γ1和γ2,对梯度1阶矩和2阶矩的偏差进行了修正,有效提升了算法的收敛速度和性能。表1给出了使用Adam优化器估计相位误差系数时的伪代码。虽然引入梯度1阶矩和2阶矩增加了乘法运算的次数,但目标函数的整体优化路径得到改善,最终能更快实现算法收敛。

表1 使用Adam优化器估计相位误差系数伪代码Tab.1 Pseudo code for estimating phase error coefficients using Adam optimizer
算法整体流程如图3所示。

图3 算法流程图Fig.3 Flowchart of the proposed algorithm
4 实验设置与分析
4.1 实验数据
(1) 仿真数据。本文从GF-3超精细条带模式下获得的L1A级图像中截取了4张聚焦良好的船舶复图像切片,切片大小为 1 28×128。参考文献[21]中的方法,本文通过在船舶切片的距离-多普勒域中添加沿距离向空变的相位误差获得空变散焦船舶图像。由于低频相位误差中的高阶分量通常较小,本文在仿真中仅添加了2~5次相位误差。具体仿真算法流程如图4所示。
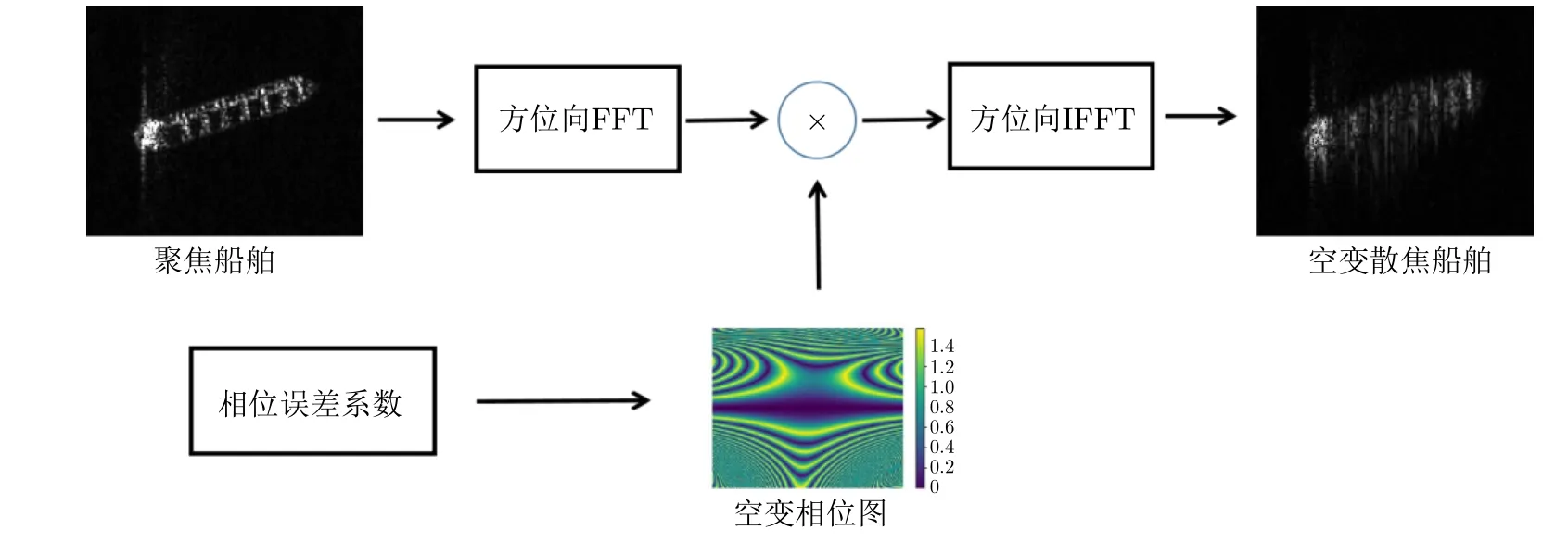
图4 空变散焦数据仿真算法流程图Fig.4 Flowchart of space-variant defocused data simulation algorithm
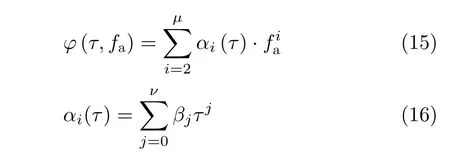
添加的2~μ阶相位误差如式(15)所示,其中τ表示距离向时间,fa表示方位向频率,αi(τ)表示i阶相位的系数,它满足式(16)所示的ν阶多项式,本次仿真实验中μ= 5,ν=2,系数βj为满足标准正态分布的随机数。仿真结果如图5所示。

图5 仿真空变散焦船舶图像Fig.5 Simulated space-variant defocused ship images
(2) 实测数据。本文从GF-3超精细条带模式下获得的L1A级图像中截取了4张具有空变散焦特性的船舶复图像切片,切片大小为 1 28×128,如图6所示,纵轴为方位向,横轴为距离向。图像参数如表2所示,S LC表示单视复图像,ASC表示升轨,DEC表示降轨。

表2 GF-3超精细条带图像参数Tab.2 The detailed information of GF-3 UFS SAR images
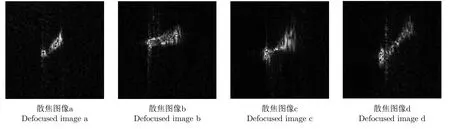
图6 GF-3空变散焦船舶图像Fig.6 GF-3 space-variant defocused ship images
4.2 聚焦质量评价指标
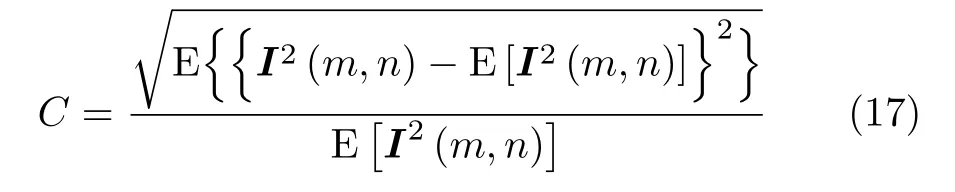
本文使用图像熵和对比度作为衡量图像聚焦质量的指标。图像的聚焦质量越高,其图像熵越小,对比度越大。图像I的图像熵定义如式(9)所示,对比度定义如式(17)所示[13]。
4.3 实验环境与参数设置
本次实验在Win10 64位环境下运行,使用的软件库包括torch1.7.0,torchvision0.8.1,numpy1.19.2,opencv-python 4.4.0.44,Python3.8.5,gdal3.0.2。在本次实验中,子图像的距离向尺寸设置为1,即对每个距离单元均进行相位误差的建模,图像熵计算区域尺寸根据待聚焦图像调节;对如式(8)所示的相位误差统一补偿至10阶。
为了证明使用Adam优化器的优越性,本文分别测试了基于SGD优化器和Momentum优化器时所提算法的性能。3种优化器的参数设置如下:
(1) SGD优化器:初始学习率设置为0.1。
(2) Momentum优化器:初始学习率设置为0.1,动量设置为0.9。
(3) Adam优化器:初始学习率设置为0.1,累积梯度指数衰减速率beta1设置为0.9,累计平方梯度指数衰减速率beta2设置为0.999。
为验证所提算法使用空变最小熵准则的有效性,本文选择PGA算法[12]和基于最小熵准则的自聚焦算法[15]作为对比算法。在PGA算法中,窗口间距设置为峰值点下降15 dB处,窗口形式为矩形窗,在估计相位误差时采用最大似然估计;在基于最小熵准则的自聚焦算法中,使用Adam优化器进行优化。
4.4 实验结果与分析
本文所有实验均在AMD 5800x CPU上运行。在下文中,算法1表示基于SGD优化器的空变最小熵自聚焦算法,算法2表示基于Momentum优化器的空变最小熵自聚焦算法,算法3表示基于Adam优化器的空变最小熵自聚焦算法,算法4表示基于最小熵准则的SAR图像自聚焦算法,算法5表示PGA算法。
图7展示了各算法在仿真数据上的实验结果,图像下方指标分别表示图像熵和对比度;图8为图像熵与对比度可视化的结果;表3展示了在仿真数据上各算法的运行速度。从图7和图8可以看出,与其他自聚焦算法相比,由算法3获得的聚焦图像在图像熵指标和对比度指标上均为最优,该结果甚至优于4.1节中仿真算法所使用的GF-3原始船舶图像的图像熵与对比度,这是由于GF-3原始船舶图像本身仍存在些许散焦现象;此外,算法3在运行速度上有很大提升,与算法1和算法2相比,算法3运行速度分别平均提升了约45倍和15倍。算法4与算法5在仿真数据上的实验结果如图7a6—图7d6和图7a7—图7d7所示。从实验结果可以看出,与图7a2—图7d2所示的空变散焦船舶图像相比,算法4与算法5所得图像在图像熵指标和对比度指标上虽然有所提升,但在视觉感知上仍是散焦的。
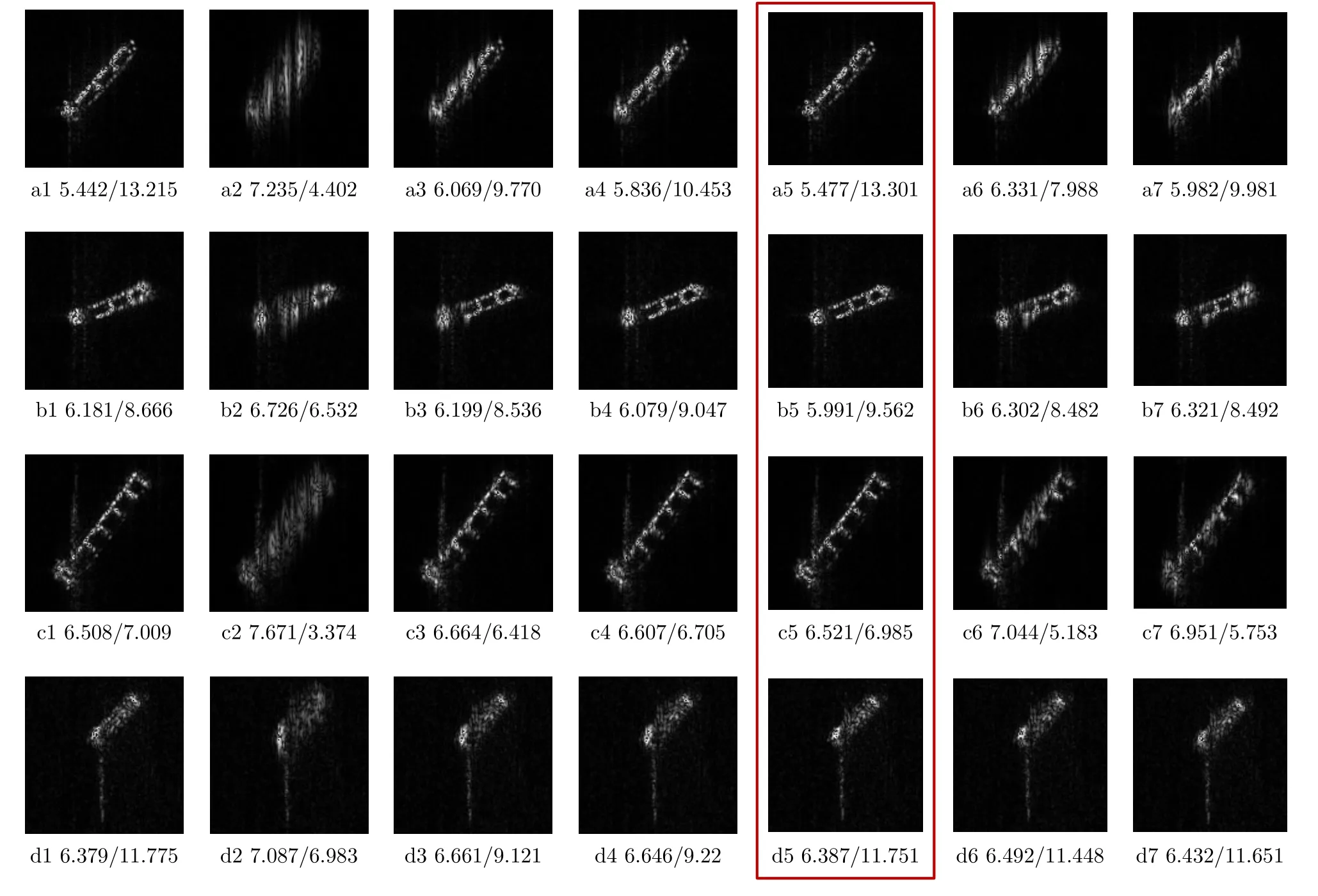
图7 在仿真数据上的自聚焦结果(a1—d1:GF-3原始船舶图像,a2—d2:仿真的空变散焦船舶图像,a3—d3:算法1船舶图像聚焦结果,a4—d4:算法2船舶图像聚焦结果,a5—d5:算法3船舶图像聚焦结果,a6—d6:算法4船舶图像聚焦结果,a7—d7:算法5船舶图像聚焦结果)Fig.7 Autofocus results on simulated data (a1—d1:the ground truth obtained in GF-3UFS mode,a2—d2:the simulated space-variant defocused ship images,a3—d3:the ship images refocused by algorithm 1,a4—d4:the ship images refocused by algorithm 2,a5—d5:the ship images refocused by algorithm 3,a6—d6:the ship images refocused by algorithm 4,a7—d7:the ship images refocused by algorithm 5)

表3 仿真数据上的算法速度对比Tab.3 Algorithm speed comparison on simulation data

图8 仿真数据自聚焦结果图像熵与对比度可视化Fig.8 Visualization of image entropy and contrast of autofocus results on simulated data
图9展示了各算法在GF-3数据上的实验结果,图像下方数据指标分别表示图像熵和对比度;图10为图像熵与对比度可视化的结果;表4展示了在仿真数据上各算法的运行速度;图11从左到右依次展示了算法3对图9散焦船舶图像a1—d1补偿的相位误差。
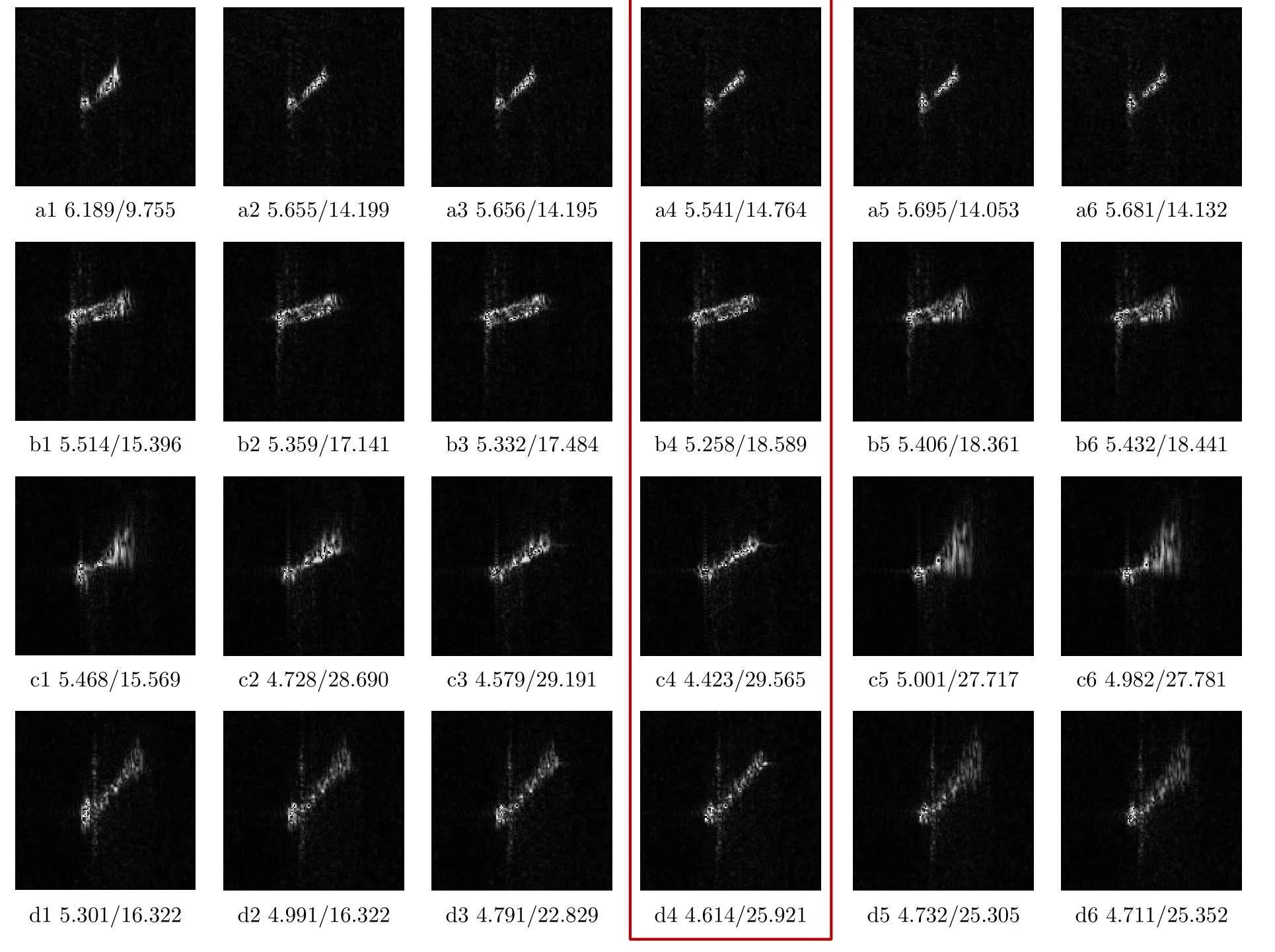
图9 在GF-3数据上的自聚焦结果(a1—d1:GF-3超精细条带模式下获得的空变散焦船舶图像,a2—d2:算法1船舶图像聚焦结果,a3—d3:算法2船舶图像聚焦结果,a4—d4:算法3船舶图像聚焦结果,a5—d5:算法4船舶图像聚焦结果,a6—d6:算法5船舶图像聚焦结果)Fig.9 Autofocus results on GF-3 data (a1—d1:the space-variant defocused ship images obtained in GF-3UFS mode,a2—d2:the ship images refocused by algorithm 1,a3—d3:the ship images refocused by algorithm 2,a4—d4:the ship images refocused by algorithm 3,a5—d5:the ship images refocused by algorithm 4,a6—d6:the ship images refocused by algorithm 5)

图10 GF-3数据自聚焦结果图像熵和对比度可视化Fig.10 Visualization of image entropy and contrast of autofocus results on GF-3 data
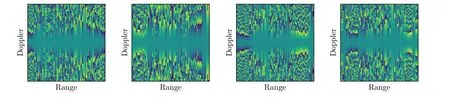
图11 算法3中补偿的相位误差Fig.11 The compensated phase error by algorithm 3

表4 GF-3数据上的算法速度对比Tab.4 Algorithm speed comparison on GF-3 data
从图9与图10可以看出,在GF-3实测数据上,无论是从视觉感知还是图像质量指标而言,算法3所取得的结果在所有算法中均是最优的;与算法1和算法2相比,算法3在运行速度上分别平均提升了约50倍和8倍;算法4与算法5在处理速度上虽然优于算法3,但其所得结果仍然存在散焦现象。
5 结论
针对具有沿距离向空变散焦特性的SAR图像船舶目标自聚焦问题,本文首先推导和分析了不同阶次相位误差对船舶图像的影响,随后在频域对相位误差进行建模,基于船舶上相邻距离门范围内相位误差近似相同的假设,结合图像熵的软叠加性,提出了一种基于Adam优化器和空变最小熵准则的SAR图像船舶目标自聚焦算法。本算法的有效性在仿真数据和GF-3实测数据上均得到了验证,实验结果同时说明了使用Adam优化器有效提升了基于空变最小熵准则的自聚焦算法的运行速度,并使算法能够实现更好的聚焦效果。
