浅析引航中的速度及船舶与泊位的位置关系判断
2022-03-04欧阳青林
欧阳青林
摘 要:航速在船舶操纵中是一个非常重要的因素,很好地掌握速度及判断好船位与泊位之间的距离,综合分析情况制定相应的引航方案,并保证引航方案的成功执行,是引航作业的关键。培养速度感及距离感是刻意学习理论在引航作业中的应用实践。
关键词:速度;距离;判断;缆间距测量法
中图分类号:U675 文献标识码:A 文章编号:1006—7973(2022)02-0111-03
1 引言
最近在中国台湾高雄港的集装箱船撞桥吊和去年韩国釜山港“米兰桥”轮撞桥吊都跟极限轻载下的操纵困难认识不足有关。速度和距离判断是引航作业的关键指标。速度在引航过程中是个非常重要的因素,船舶在运动过程中有三个方面的速度:纵向速度、横向速度和旋转速度。一般认为主机功率与速度之间应该满足“因果”关系,但是笔者认为应更重视这个“果”,即“速度”,港内操作更要关注港速。
船舶大型化后,操纵者靠离泊时判断码头前沿船舶与岸壁距离带来新的挑战。视觉判断是最快捷的判断手段,船舶速度感和距离感的形成过程就是船舶运动感觉在人脑中形成的经验和认识。通过经验的积累,《刻意练习》中强调挑战自己的舒适区,在实践中用电子仪器核实优化自己对纵向横向及旋转速度的判断,纵向及横向距离的判断,对提升引航能力,强化引航技术,更好地提高引航安全都有重大意义。
2 速度
2.1 纵向速度
引航员在引领船舶进港时,参考引航卡,应区分主机转速对应船速列表中给出空船和满载时的船速差异,全速/半速/慢速/微速对应的船速以及各车之间船速的递减率。掌握递减率是为了更精确地掌握减车时的船舶速度递减率。
从笔者的引航实践中观察到,引航卡中船舶正车与对应时的倒车主机转速一样,知道前进的动力就能大概推导出倒车时主机能提供的倒车力大小。因为固定螺旋桨FPP的倒车功率是前进功率的70%左右,可变螺旋桨CPP车的倒车功率为前进功率的50%左右。不过现在有的大型集装箱在引航卡上标注倒车功率为30%多,这点要特别引起注意。
2.1.1船舶的实际平均吃水、船宽和船长
关注吃水、船宽是了解船舶的排水量也就是船舶的质量。在物理学上物质的惯性由质量决定,质量越大的船舶惯性越大。而船宽与船舶所受的水阻力成正比,船宽越大船舶水阻力越大。
2.1.2船舶实际吃水
一般船上会用不同颜色油漆给予标示满载水线,登轮时应关注实际水线与满载水线之间的高度差。因为一艘船舶的主机功率的设定是以空载及满载时的排水量设定的。实际吃水结合引航卡提供的速度参考值可推算當前装载下的惯性和主机功率的匹配关系,也就是单位排水量下的主机功率。
2.1.3 吃水差
船舶不同吃水差在行进时,其水下形状不同。平吃水水下的水阻力小减速慢,而吃水差大的船舶水下船体成楔形,通常尾倾船的水阻力面大相应的减速快。对于小船轻载时要特别关注吃水差对船减速的影响,这也影响旋回圈的大小。
2.1.4不同车钟速度递减区间大小的重要性
船速与船舶行进中受到的水阻力并不是线性关系的,而是非线性关系的,速度越高时,船速和水阻力曲线的斜率越大,速度越低时这个曲线的斜率越小。在加车时,观察船舶加车性能以判断主机性能,不过增速同时受加车递增区间大小的影响。同样在减车时判断船舶惯性大小也要剔去递减率对船舶减车快慢的影响。能够在加减车的同时很好地掌握主机性能和船舶惯性,对后续的靠泊操纵便能做到心中有数。
2.1.5 船舶微速的重要性
微速的重要性表现在以下几方面:一方面确定倒车用什么车合适,例如有小船微速7节,也有的微速3节。到泊位要倒车时前者减速效果好些,后者可以直接用慢车倒车,因为正车才3节,微速倒车功率太小。另一方面,小船拖锚靠泊时,知道微速大小可用于推定抛锚出链长度,抛多少节锚开车能拖得动。在同样的外界靠泊条件下,微速为7节和3节的停车时机和抛多少节锚是不一样的。
2.1.6极限状况下的船况对速度的影响
当船舶装载在满载时、特别轻载时、船很新刚下水时和船舶很旧时,对操纵性能都有很大的影响。
(1)满载时船舶惯性大,单位排水量下船舶分配的主机功率小。
(2)特别轻载时船舶质量轻惯性小,同时水下面积也小,纵向的横向的阻力都小,在入泊时用拖轮顶时要知道可能横向余速递减较慢。同时轻载水线上面积增加,干舷高受风面积加大,拖轮顶时受船体船头船尾船型流线更凹陷,顶推点更靠船中;如果要放缆拖时放缆要比干舷低时放得更长,时机要充分,不然拖缆不够长,拖轮提供的顺缆绳方向的纵向分力小。再有一种情况是轻载时船尾螺旋桨有部分在水面之上。这种船停车余速递减可能很快,但是倒车时速度递减则相对慢,因为螺旋桨水线上部分不能有效地提供倒车动力。
(3)特别新的船主机还处在磨合阶段,不能满负荷工作,同时船上人员对船舶设备也在熟悉阶段。
(4)特别旧的船主机、锚机等都处于低标准状态下,要抛锚时不能抛下,要倒车时没有车的概率都很高,同时低标准船上很多配员也是低标准的,这些因素都会影响船舶操纵安全,以上这些极限状态船舶,在操纵时余速控制上和转向旋回时要更加谨慎,引航方案中的应急计划要考虑更充分些。
2.2横向速度
及时准确地预判横向速度在靠泊时非常重要。横向移动速度不但受风流大小的影响,同时还受风舷角和流压角的影响。知道外界的风力风向、流速流向是预判横向移动速度的前提条件。风力风向易于判断,而流向流速难于准确地知道。除了通过潮汐表来推断外,还可通过观察受风流影响的水面漂浮物的态势判定。例如海图上岸壁水深的走向分布、锚地船的大体走向、灯船形态、灯浮标处的流花流线、水面漂浮物的移动方向(水面漂浮物流动要剔除风及风生流的影响)。总之,流的判定是经验加现场的观察。
2.3 旋转速度
在进车时用舵转向可以判定船舶舵效好坏,转头速率ROT,在要把定后观察舵工操舵熟练程度,风流对船舶偏转速度的影响。在快到泊位前停车趟航这段距离要勤于观察舵角指示器,看看用什么舵才能把定船舶。因为停车后所有的风流对船舶旋转速度的影响都要用舵去调整,同时要考虑淌航余速。现场掌握风流,船速对船舶航向稳定性、转向性能的了解。例如一艘快要向右转向入泊的船,现在用左满舵刚刚能把定,而另一艘也是需要同样操作的船用正舵就可以把定,在不考虑其他因素的情况下前者向右转向就更从容些,但前者也更容易失去舵效。船舶在倒车时关注倒车侧压力对船舶旋转的影响,侧压力对船的影响各个船差异非常大,要小心谨慎的处理以达到充分利用和有效遏制。
3 速度观测
船上能够从设备上读取船舶速度的是GPS和测速仪。GPS测速原理是卫星连续的定位,同时知道两次定位之间的时间间隔,通过计算出来的V=S/T,所以显示的速度是GPS天线位置的综合速度,其中包括横向、纵向和旋转速度。测速仪因工作原理不一样分为对水速度和对地速度,很多大船上多普勒计程仪上的速度显示还有横向速度。笔者感觉多普勒速度在靠泊时速度有滞后性。
所以最有效和直观的是培养自己的速度感,通过观查船舶周边的物体来判断船舶纵向和横向速度。
3.1 观察横向的叠标
当前位置到最近叠标的距离不同感觉差异很大,因为这是线速度和角速度的关系V=ØR,观察叠标时当船到物标距离(R)不同时角速度(Ø)是一定的,同样的速度感(Ø)时R越大实际速度越大,也就是同样的速度感下,船离观察叠标越远速度越大,反过来考虑也可以。
3.2 观察固定物标
人船合一时,自身感觉的速度就是船舶移动的速度,在实际中这种判断速度的方法很难,但是要能很好地掌握那就是一个很高的境界。笔者通常做法是,视野中把两边港池固定物标融入眼界中同时虚化掉本船,就能感知船舶的综合速度。观察水流,特别是在有倒车时观察倒车排出流向前移动的距离来判断速度,一般情况下当排出流到船中时,此时船基本没有对水速度。这种情况特别是在锚地抛锚周边物标少更实用。
4距离判断
通常靠离泊时,其中船舶到泊位纵横向距离判断的精度对操纵船舶靠离码头非常重要。
4.1利用参考物标
例如集装箱桥吊横梁长度,利用太阳斜照产生的影子投射到码头或水面的位置,利用侧推或拖轮排出流来判断船头的位置。
4.2利用助航仪器
雷达或电子海图ECDIS上显示的距离,其中需要注意的是雷达显示参考点REF POINT有两种模式天线点ANT和操作点CCRP,利用电子设备的数值就可以知道各个设备的精度和缺陷性。
4.3用刻意学习的方法
在平时的引航经验积累中,要有意识地培养自己的判断能力,特别是速度感和距离感。在引航实践中来挑战自己的舒适区,在实践中用GPS速度和雷达测距来核实和对比观测速度和距离,优化自己的速度和距离感。《刻意练习》中的方法对提升引航能力是非常有用的,例如良好的心理表征、挑战自己的舒适区、对结果进行核实等。
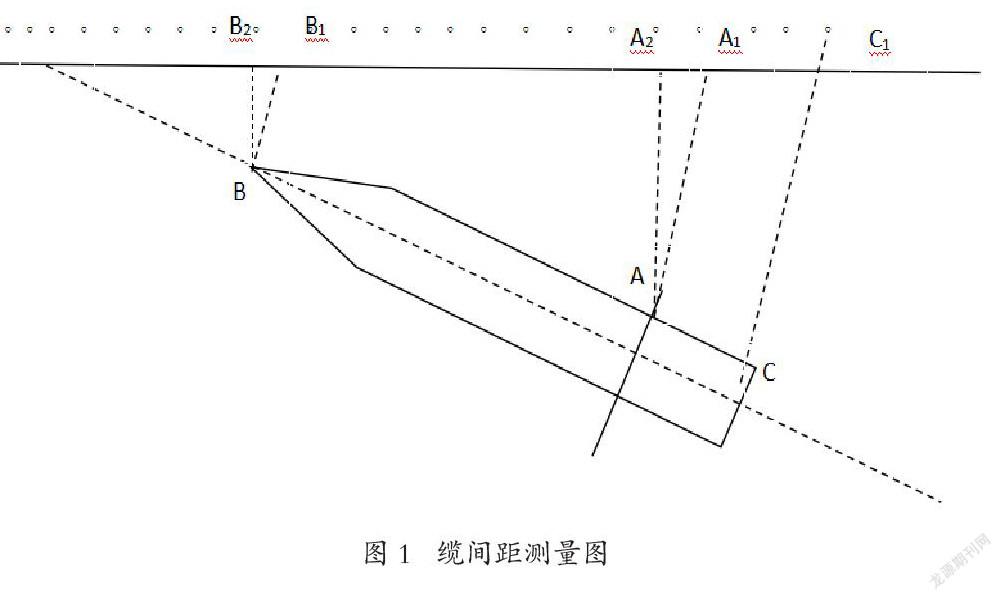
4.4 缆间距测量法
如果把驾驶台观测者的视觉位置放在船头大副或船尾二副的位置,那样判断船头船尾距离泊位的距离就简单,而引航员与大副二副的距离就是驾驶台到船头船尾的距离。用几何关系把船与泊位的纵横距离利用缆间距做刻度尺,再去除船頭船尾观察者的视觉差就可以了,下面来介绍具体方法。
4.4.1基于视觉判断
这种方法基于一个视觉常识,人的视觉对对称图形的敏感度比对距离的敏感度高,引航员站在驾驶台两侧A点观察,在码头上找到一点A1用视觉感觉使OAA1成等腰三角形也就是BB1AA1四点成等腰梯形,A1点的确定是凭感觉出来的,也是判断推算其他位置的基点,很重要。利用等腰三角形和等腰梯形两斜边相等。其中AB和AC长度已知,A1点确定后B1和C1都可以倒推出来。例如如图如果向后离泊掉头BB1的距离,可以大概认为是船头到泊位的最近可能碰撞距离(忽略转心位置造成的旋转运动),BB1的距离可以用B1点附近的缆间距来读取(也是利用等腰三角形两斜边相等)。此时如果向右掉头就特别有底气,随船后退和离泊角度增大时,A1点也在随船后退和离泊角度的增加,更新A1同时就能推导出B1点,这样船头与码头的关系就非常量化了。靠泊离泊注意点不同,不同运动状态下需要注意的参数不同而已。利用简单的三角形就可以确定船头和船尾到泊位的各种距离,可以从缆间距读取的数据有OB BB1 CC1等。
4.4.2 视觉判断经验方法的局限性
如果前后有船,特别是船尾泊位有船还很近时,在判断A1点时船后退,A1点就可能被别的船给遮挡了而不能确定A1基点,补救措施是一次性开大点角度再有纵向的退速。有的泊位缆间距大小不一,这样就给读取距离带来不确定。船与泊位的关系越量化精度越高,靠离泊时越有底气。
5 结语
引航操纵中航速和距离判断是引航安全的基础,也是作业的关键。对纵向速度、横向速度、旋转速度的判断是对船性认知的重点。对泊位边距离的判断是保证靠离泊安全的基础,需长期积累有意识地提高自己的引航能力,培养良好的速度感距离感。
参考文献:
[1] 赵月林,古文贤.船舶操纵[M].辽宁:大连海事大学,1999.
[2] 安德斯·埃里克森,罗伯特·普尔.刻意学习[M].北京:北京联合出版有限公司,2017.
