基于节点能量约束的无线传感器网络目标跟踪算法
2022-03-02任腾飞
任腾飞,周 洁
(西安工业大学电子信息工程学院,西安 710021)
0 引言
近年来,无线传感器网络在目标跟踪、场景监测、网络信息安全等方面得到了广泛应用。传感器节点随机地布置在目标区域中来获取目标运动、方位等信息[1]。传感器节点布置后,能量会随着时间逐渐耗尽并且难以充电,因此能量是一个需要重点考虑的因素,在实际的使用中往往需要同时满足效率、能耗等诸多约束。例如在实际跟踪场景中,如果调用全部节点进行目标的状态估计,部分节点可能会因远离目标而导致其对于提升估计精度的作用很小,但仍要消耗一定的通信能量[2]。因此,可以考虑在节点规划中加入能量约束条件来进行合理的节点选取。
如今国内外专家、学者针对节点能量约束进行了许多研究,其中,胡波等[3]提出了一种自适应节点调度算法,该方法将问题建模为马尔可夫决策过程迭代求解代价,综合考虑了误差与传感器能量消耗。李强懿[4]设计一种基于证据理论的节点部署方案,来延长网络使用寿命。彭铎[5]将簇头选取过程进行分解,将复杂决策问题拆分为层次结构模型,均衡了节点能耗。文献[6]提出一种利用RSSI测距的伪节点规划定位算法。利用规划算法从插入的伪节点中找出与未知节点匹配程度最佳的位置,并以此定位未知节点。降低了节点能耗。文献[7]研究了存在有限的带宽资源与能量约束下的多跳无线传感器网络的目标跟踪问题,基于粒子滤波算法将传感器节点的观测数据量化压缩为二元信号,并采用二元中继策略将信息传递给融合中心,降低了网络能耗,提升了跟踪精度。
以上所提出的节点规划算法仅重点考虑了领导节点改变时所产生的能量消耗,而将子节点传输数据给领导节点产生的开销作为固定值,存在着一定的局限性[8]。本文提出基于节点能量约束的规划算法。根据跟踪中的误差矩阵来进行节点规划,在约束条件下关注领导节点改变与数据传输所产生的能量消耗,主要贡献总结如下:
(1)首先构建节点跟踪模型,提出簇结构的分布式连接网络,设有子节点与领导节点。
(2)基于能量约束提出的节点规划算法,根据信息形式的扩展卡尔曼滤波算法完成目标跟踪与节点规划过程。
(3)构建仿真模型并验证所提出算法的有效性。
1 目标跟踪与节点规划
1.1 构建系统模型
将N个传感器部署在目标区域,S1,S2,…,SN代表各自位置,如图1所示。当被跟踪目标在传感器节点网络中机动时,其k时刻的状态为xk=其中(xk,yk)为k时刻的目标位置,为x和y方向上的速度,目标的动态模型如下:

图1 无线传感器网络模型
式中:A为转移矩阵,G是常数矩阵;噪声uk-1。
在k时刻,第i个节点的观测方程为
记各节点的观测为
状态的估计量:
式中:和Mk代表估计状态与误差,和Pk代表预测状态和误差。信息形式的扩展卡尔曼滤波算法迭代形式:
1.2 目标跟踪与节点规划过程
依据能量约束条件来进行目标跟踪与节点规划,在第k时刻对目标状态进行估计后,规划k+1时刻传输数据的子节点与领导节点,降低传感器节点网络能量消耗,减小k+1时刻目标状态估计误差。
(1)数据聚合:领导节点收集其他传感器节点发送的数据,并利用k时刻和k-1时刻数据信息对目标状态进行更新;
(2)目标跟踪:通过更新目标状态,规划k+1时刻的领导节点与其他子节点;
(3)传感器调度:领导节点将目标状态、估计误差等数据传递给下一时刻领导节点。

图2 目标跟踪与节点规划流程图
2 节点规划过程
2.1 能量约束函数
能量消耗主要由以下几部分构成:
(1)子节点得到观测数据,然后传输给领导节点所产生的能量消耗;
(2)领导节点接收子节点传输的目标估计状态等信息,并在领导节点发生改变时,传输给下一个领导节点产生的消耗。
式(11)分为两部分:数据聚合的能耗与领导节点间传输信息能耗。
2.2 节点规划算法
信息形式的扩展卡尔曼滤波算法进行节点规划利用的是估计误差矩阵Mk,根据式(6)-(10),通过第k步估计出目标的状态x̂k和误差矩阵Mk,不用第k+1步的观测Zk+1也可以得到误差矩阵Mk+1,因此,就可以在第k步利用Mk+1决定第k+1步哪些节点数据参与了目标跟踪。根据式(8),Mk+1可以描述为
目标问题表示为
ai∈{ 0 ,1},c∈{s1,s2,…,sN},a=[a1,a2,…,aN]T,b为通信能量约束。
式(13)中,a与c为两种不同变量,借助高斯-赛德尔方法(Gauss-Seidel method),进行交替迭代求解。即先固定变量c,求得ak+1的最优解:
然后将变量a固定来求解ck+1。假设新的领导节点在选中的子节点中产生,即ck+1∈{si|ai=1,1≤i≤N},则ck+1可通过式(15)求得:
针对式(15)整数规划问题,引入了凸松弛方法,该方法是将非凸限制条件ai∈{0,1}松弛为凸限制条件0≤ai≤1。则F(·)为关于a的凸函数,可以使用内点法来求解该凸优化问题:
节点规划算法流程如图3所示。
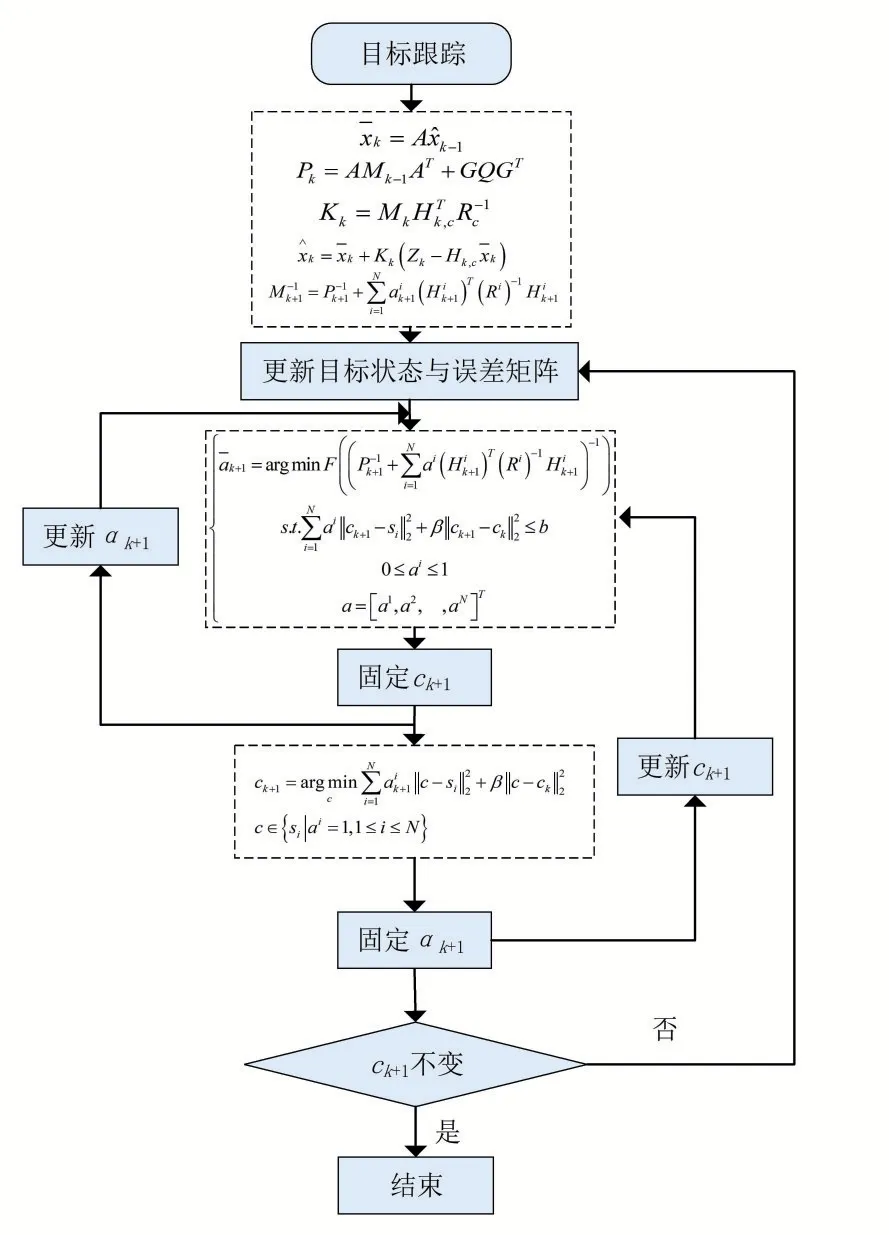
图3 节点规划算法流程
3 仿真与验证
为了验证所提节点规划算法应用在目标跟踪方面的性能,以参考算法做对照,同样是基于领导节点,在节点规划中只考虑领导节点转变所产生的能量消耗。通过仿真实验验证,该算法更优。
在监测区域内,随机、均匀地布置传感器节点,节点数为200。待跟踪目标按照式(1)移动,其中:
假设噪声uk来自于扰动,q=0.05,均值为0,协方差矩阵为Q:
观测方程可以表示为
其中:是观测值;P0=500,r(xk)=[xk,yk]T;噪声均值为0,方差为1。
每次进行40步跟踪,通过200次蒙特卡洛计算。图4为目标跟踪与节点规划过程。图中五角星代表领导节点位置,随着每一步跟踪,实线代表的真实轨迹与虚线代表的预测轨迹几乎重合,同时相连的五角星形成了领导节点的更替路径。在通信能量约束为2000时,本文与对比算法的误差变化曲线如图5所示。

图4 无线传感器网络中进行目标跟踪及节点规划的过程

图5 算法误差对比
4 结语
本文在进行目标跟踪与节点规划过程中引入能量约束条件,综合考虑数据传输和领导节点改变的能耗来选择领导节点,有效地提升了目标跟踪性能。在计算中对目标估计节点和待选择的领导节点位置进行迭代求解,降低了该问题的复杂性。仿真结果表明,通过合理的选取与规划领导节点,使目标跟踪性能得到了提升。
