基于冗余信息融合的车辆质心侧偏角估计方法*
2022-03-01蔡英凤
夏 秋,陈 特,陈 龙,徐 兴,蔡英凤
(1. 江苏大学汽车工程研究院,镇江 212013;2. 滁州学院机械与电气工程学院,滁州 239000)
前言
随着汽车行业的蓬勃发展和相关核心技术的不断累积,汽车产业规模逐步增大并完善,汽车的保有量与普及率也在不断提高。汽车工业技术的不断成熟,促进了产品竞争力的提升以及消费者对于产品的预期,使得汽车控制功能愈发完善与人性化。近年来,得益于计算机工业技术、通信技术等相关交叉领域的发展,汽车控制系统变得越来越复杂,能够同时接收更多的传感器信息并作出及时合理的控制决策。对于一个完整的车辆控制系统来说,准确可靠的车辆状态信息是车辆运动规划与动力学控制的重要支撑,车辆状态信息的精度将直接影响到整车运动控制品质。但是,一些车辆行驶状态,尤其是车辆质心侧偏角,难以通过车载传感器直接测量得到。因此,为降低生产和设计成本,同时考虑到当前质心侧偏角传感器缺乏的情况,很有必要设计可靠的车辆行驶状态估计方法,通过软测量的方式来替代实物传感器。
目前,关于车辆行驶状态估计方法的研究已有许多,其中,基于模型的车辆行驶状态估计器是最为常见的一种方式。在此研究中,研究人员通常根据公认的车辆模型,并利用相应的估计算法设计车辆状态估计器,将现有的易得的传感器信息作为估计器输入来计算得到所需的车辆状态信息。目前,已有许多先进的估计理论在车辆行驶状态观测中得到了应用,其中包括滑模算法、神经网络算法、粒子群算法、卡尔曼滤波算法等等。其中,卡尔曼滤波及其改进算法应用的最为广泛,也取得了良好的估计效果。常用的卡尔曼滤波算法包括扩展卡尔曼滤波、无迹卡尔曼滤波、容积卡尔曼滤波以及粒子滤波等。随着研究的深入,现有研究通常关注于提高改进卡尔曼滤波算法的自适应能力,从而确保该算法的多工况适应能力及其在复杂驾驶环境下的实际效果。近年来,研究者开始倾向于研究冗余输入信息下的车辆状态融合估计问题。根据不同车辆模型关系,设计多个车辆状态估计器,结合多个传感器测量信息的冗余度,利用不同估计器之间的误差迭代与补偿,来提高整个估计系统的估计精度和可靠性。
为提高车辆质心侧偏角估计精度,本文中提出了一种基于冗余信息融合的车辆质心侧偏角估计方法。根据车辆动力学模型和运动学模型特点,利用容积卡尔曼滤波算法分别设计了相应的车辆行驶状态估计器,同时,在充分分析不同估计器的潜在特性和适用场景的基础上,设计了一种车辆质心侧偏角融合估计策略,采用动态自适应加权的方式提高了质心侧偏角估计的精度和多工况适应能力。
1 车辆模型
为便于车辆状态观测器的设计并表征不同车辆参数间的数学关系,建立了横向和横摆方向的车辆动力学方程。车辆动力学模型如图1 所示,建立了动态坐标系,其中,动态坐标系原点与车辆质心重合,轴为车辆纵向行驶方向,轴为车辆横向运动方向。本文不考虑车辆悬架系统的动力学方程,只讨论了车辆在平面上的运动,忽略了车辆俯仰、横摆、垂向运动。单轨车辆模型的动力学方程可以表示为
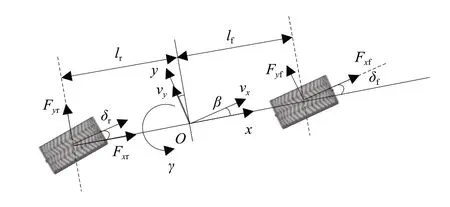
图1 单轨车辆模型

式中:v为纵向车速;v为侧向车速;为横摆角速度;为汽车质量;I为绕轴的转动惯量;和分别为车辆质心距前、后轴的距离;F和F分别为前、后轮胎的横向轮胎力。

式中:和分别为前、后轮胎的轮胎侧偏刚度;和分别为前、后轮胎的轮胎侧偏角。

式中为车辆前轮转角。车辆质心侧偏角可表示为

联立式(1)、式(2)和式(5),可得单轨车辆动力学模型为

纵向车速的运动学方程可以表示为

式中a为车辆纵向加速度。横向车速的运动学方程可表示为

式中a为车辆横向加速度。四轮转速的运动方程可表示为
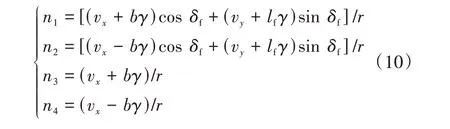
式中:、、、分别为左前轮、右前轮、右后轮、左后轮的轮速;为半轮距;为车轮有效半径。从而,利用式(10)便可建立四轮转速与纵向车速、横向车速和车辆横摆角速度之间的关系。
2 车辆质心侧偏角融合估计方法
2.1 用于车辆状态估计的容积卡尔曼滤波
式(6)、式(7)中的车辆动力学模型和式(8)、式(9)中的车辆运动学模型皆可用于车辆状态估计,且其皆可表示为如下的离散状态空间方程:
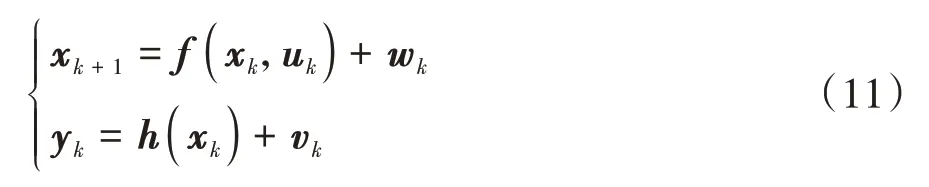
式中:x为离散系统状态向量;y为离散系统测量向量;(·)为离散系统状态转移方程;(·)为离散系统测量方程;w为系统噪声;v为测量噪声,w和v为互不相关的高斯白噪声。
与普通扩展卡尔曼滤波相比,容积卡尔曼滤波能有效地减小滤波发散,且其计算量仅与待估系统的状态维数成正比,因此能有效减小计算量,近年来在许多领域得到了广泛的应用。根据式(11)中的非线性状态空间方程,自适应容积卡尔曼滤波算法的迭代步骤如下。
(1)选择初始值

(2)计算容积点

式中:为容积点序列号;n为系统模型维数;可通过对P计算Cholesky 分解得到S且有P= SS;ξ=n[1] 为容积点。从而,分别对应车辆动力学模型估计方法和运动学模型估计方法的容积点可表示为
(3)时间更新
容积点传播可表示为

一步状态预测方程可表示为
式中Q为w的协方差矩阵。
(4)测量更新
P的Cholesky分解可表示为

容积点可表示为

容积点传播可表示为

测量更新预测结果可表示为

测量预测结果的协方差矩阵和互协方差矩阵可分别表示为


式中R为v的协方差矩阵。ε的预测误差可通过计算实际测量值和预测测量值之间的差值获得。



车辆状态估计值为

车辆状态估计的误差协方差矩阵可表示为

2.2 基于动力学模型的车辆质心侧偏角估计
根据车辆动力学模型和容积卡尔曼滤波算法,设计基于动力学模型的车辆质心侧偏角估计器。由式(5)和式(8)可得

从而,式(6)、式(7)和式(29)的离散化结果可以表示为
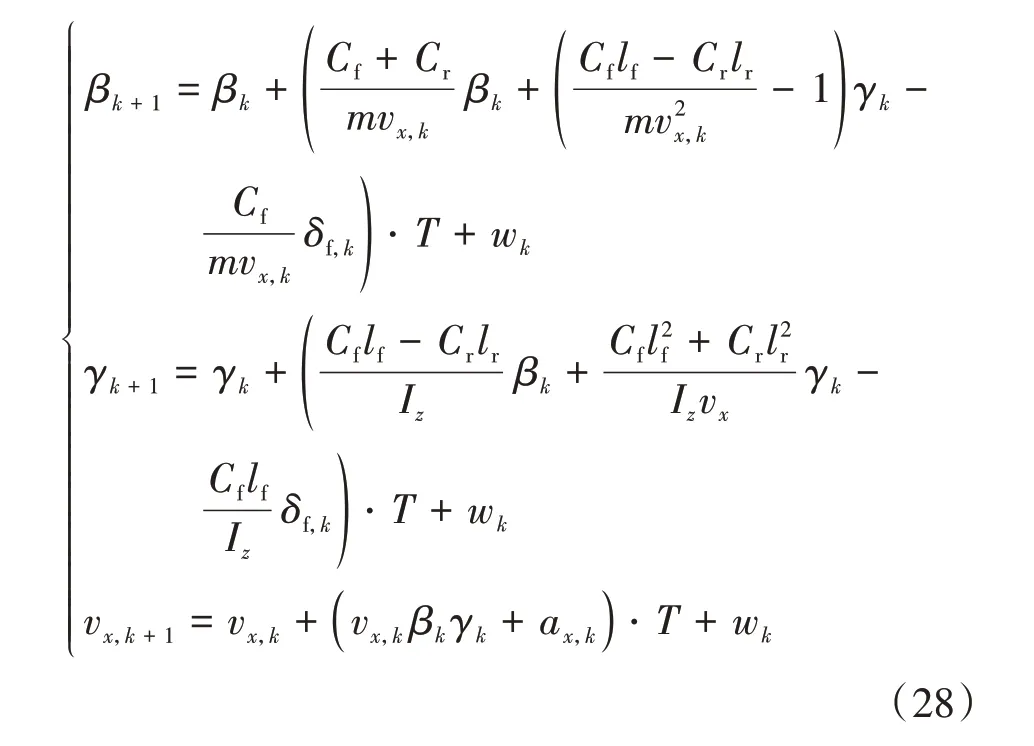
式中为卡尔曼滤波的采样周期。根据式(5)、式(6)和式(9),可得

从而,式(29)可用作动力学模型估计器的测量更新方程,且其离散化形式可表示为

从而车辆动力学系统模型的Jacobi矩阵可表示为

从而,动力学模型估计器的测量矩阵可表示为
根据车辆动力学模型的离散方程,可采用如前所述的容积卡尔曼滤波算法来设计车辆状态估计器,其中卡尔曼滤波的状态向量为x=[β γ v], 测 量 向 量 为y=[a],已知输入为u=[ a]。
2.3 基于运动学模型的车辆质心侧偏角估计
然而,基于动力学模型的车辆状态估计器只考虑了线性轮胎模型的情况,当轮胎力处于非线性区域时,估计精度会出现一定程度的下降。同时,当测量得到的车辆横向加速度出现未知偏差时,容易造成估计误差自循环和误差累积,使得基于动力学模型的卡尔曼滤波估计结果偏离实际值。为了避免这一问题,利用车辆运动学模型设计车辆行驶状态估计器,旨在利用车辆测量信息的冗余度,提高估计结果的精度和自适应能力。同样地,式(8)和式(9)的离散化方程可表示为

从而车辆运动学模型的Jacobi矩阵可表示为

然后,根据式(10)中的四轮转速方程,设计运动学模型估计器的测量更新方程。从而,可利用测量信息的冗余度来提高估计结果可靠性。式(10)的离散化结果可写成

根据式(32),运动学模型估计器的测量更新矩阵可表示为
从而,利用如前所述的容积卡尔曼滤波算法,可设计基于运动模型的车辆状态滤波器,实现对纵向车速和横向车速的估计,其中,卡尔曼滤波的状态向量 为x=[v v],测 量 向 量 为y=[ n n n], 已 知 输 入 为 u=[ γ a a]。然后,利用式(5)并结合估计所得的纵向车速和横向车速,即可得到基于运动学模型的车辆质心侧偏角估计结果。
2.4 车辆质心侧偏角融合估计策略
在基于动力学模型的滤波器设计过程中,轮胎侧向力的计算公式是线性的。结合轮胎侧向力和轮胎侧偏角之间的关系可知,当轮胎侧偏角较小时,轮胎侧向力与轮胎侧偏角间呈线性关系,当轮胎侧偏角过大时,轮胎侧向力达到饱和并随着轮胎侧偏角的增大而略微减小。也就是说,当轮胎侧向力处于线性区域时,基于动力学模型的滤波器具有较高的估计精度。然而,当轮胎侧偏角过大时,轮胎受力会达到非线性区域,此时车辆模型的不确定性会降低基于动力学模型滤波器的估计效果。
基于运动学模型的滤波器具有良好的稳态估计性能,故其估计能力不受轮胎侧向力饱和现象的影响。然而,当轮胎受力处于线性区域时,基于轮速信息的估计方法的精度比基于动力学模型的估计方法要低。特别是当车辆轮胎力的动态响应速度较快时,由轮胎力变化产生的轮速信息变化会有一定程度的滞后,导致轮速信息不足以及时反馈车辆动态关系的变化。当轮胎力处于非线性区域时,轮胎侧向力的动态变化速度减慢,使得单位幅值的轮胎力增减引起的车轮转速变化范围相对较小,说明基于运动学模型的滤波器在该情况下具有更好的估计效果。
根据以上分析,结合两种估计器的优点和适用场景,如图2 所示,提出了一种新的车辆质心侧偏角融合估计策略。

图2 融合估计策略
在图2 中,基于车辆动力学模型的状态估计器所得的纵向车速、横摆角速度和质心侧偏角分别表示为v、和,基于车辆运动学模型的状态估计器所得的纵向车速、侧向车速和质心侧偏角分别表示为v、v和。为了避免模型不确定性和未知干扰对估计效果的影响,采用误差补偿的方式来提高车辆状态估计精度,补偿结果可表示为
式中和分别表示动力学模型估计器和运动学模型估计器的偏差度。从而,车辆质心侧偏角估计的补偿结果可表示为

式中和分别为动力学模型估计器和运动学模型估计器补偿后的车辆质心侧偏角。
由图2 可知,轮胎侧偏角影响动力学模型估计器和运动学模型估计器的适用场景。为融合动力学模型估计器和运动学模型估计器的补偿结果,设计了自适应权重计算模块,依据轮胎侧偏角来动态调整不同估计器间的权重系数。根据式(4)可得

式中为标称轮胎侧偏角。因此,自适应权重系数可设计为


此外,调节参数和的取值也影响和增加和减小的变化速度。如果和的取值过小,则自适应权重系数对轮胎侧偏角的变化将会十分敏感,其动态调节能力和多工况自适应能力将会大大下降。如果和的取值过大,则权重系数的调节范围和动态响应能力将会下降。测试可知,当调节参数的取值分别为2.25 和5 时,融合估计效果相对较好。根据自适应权重系数,可得车辆质心侧偏角的融合估计结果为

式中为质心侧偏角融合估计值。同时,所得的质心侧偏角融合估计值被用作自适应权重计算模块的输入量。
3 仿真验证
为了验证文中提出的车辆质心侧偏角融合估计策略的应用效果,利用Carsim-Simulink 联合仿真平台进行了仿真验证,对应的车辆参数如表1所示。

表1 车辆参数
3.1 正弦转向工况
首先进行了正弦转向工况下的车辆仿真验证,仿真中所设置的转向盘转角如图3 所示。分别进行了低速和高速两种情况下的仿真测试,对应车速分别为36 和72 km/h。低速正弦转向工况下的状态估计仿真结果如图4 所示。该工况下车辆转向运动相对较为平缓,故基于动力学模型的状态估计器的估计效果略好于基于运动学模型的状态估计器,同时,自适应权重系数能够随着车辆行驶状态的变化而动态调整,从而确保融合估计结果更好地跟踪实际的车辆质心侧偏角,提高了整体估计精度。图5 所示为高速正弦转向工况下的车辆状态估计结果,可知动力学模型估计器和运动学模型估计器都能保持良好的观测效果且动力学模型估计器效果略好,而融合估计结果能动态调整两种估计器间的权重系数,从而进一步提高估计效果。
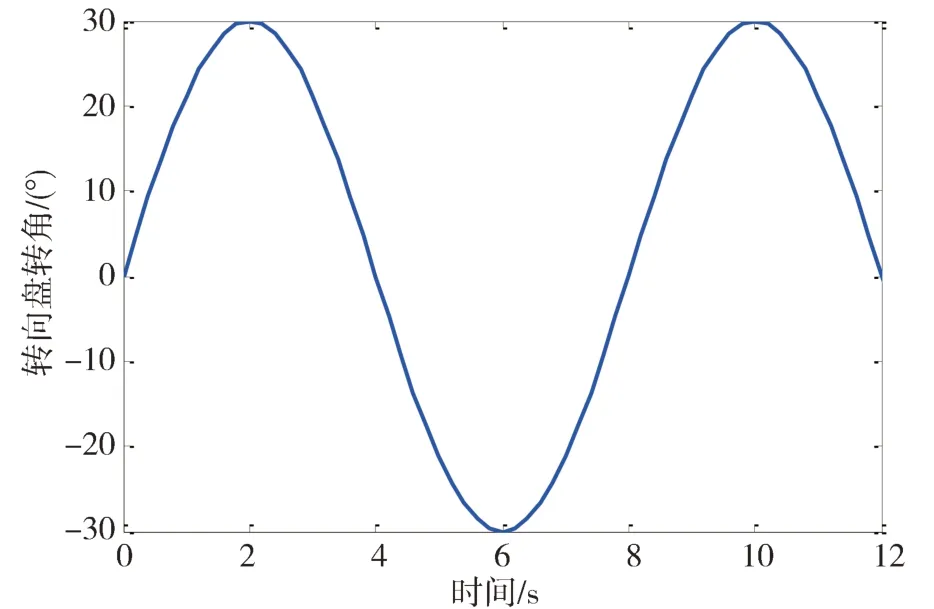
图3 正弦转向工况转向盘转角
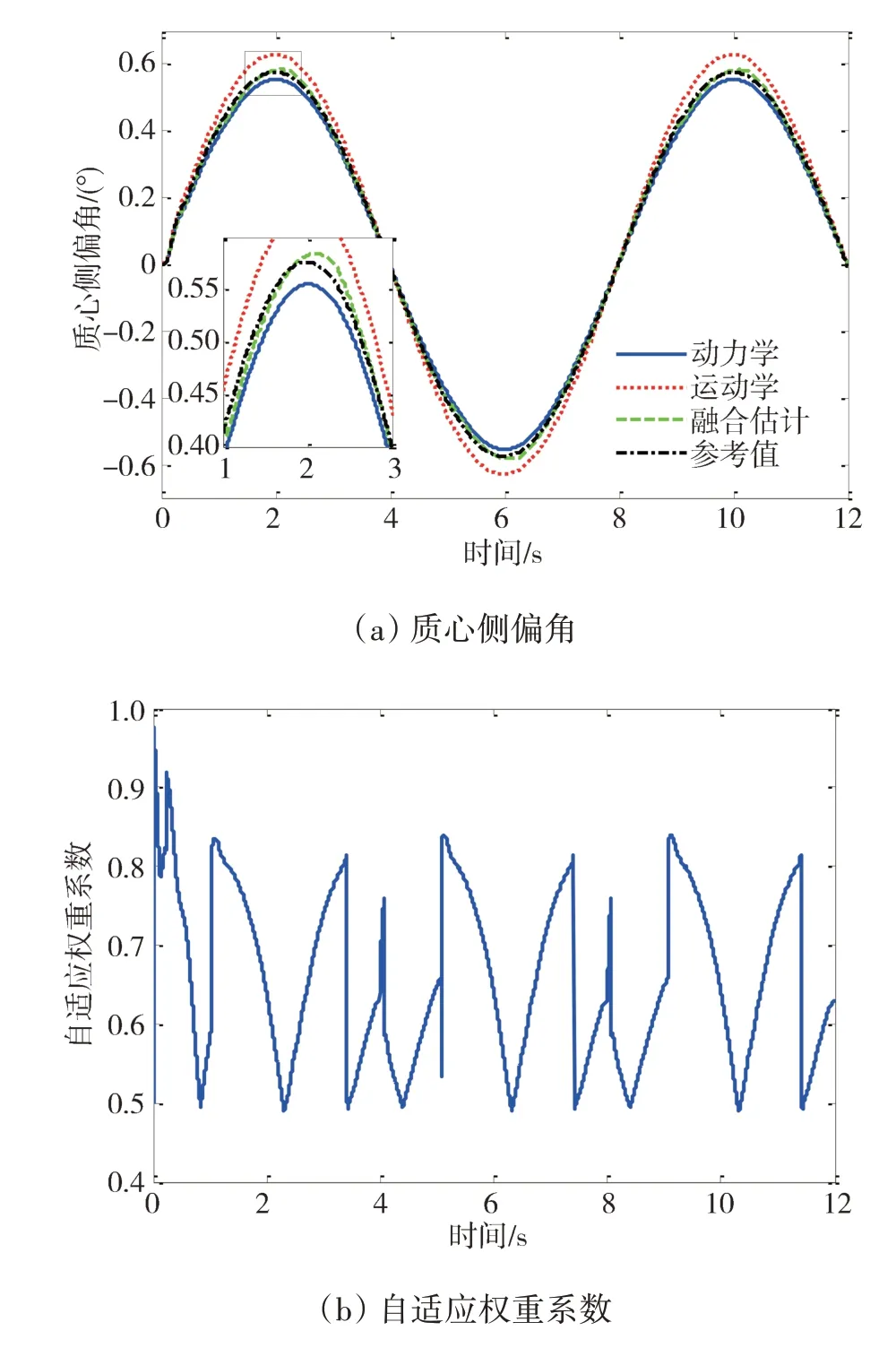
图4 低速正弦转向工况估计结果
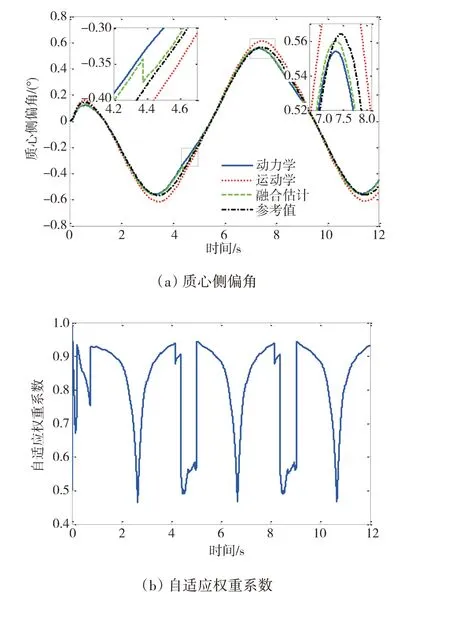
图5 高速正弦转向工况估计结果
3.2 鱼钩转向工况
为了进一步体现文中方法的效果,进行了转向操纵更为剧烈的鱼钩转向工况下的车辆仿真验证,仿真中所设置的转向盘转角如图6所示。
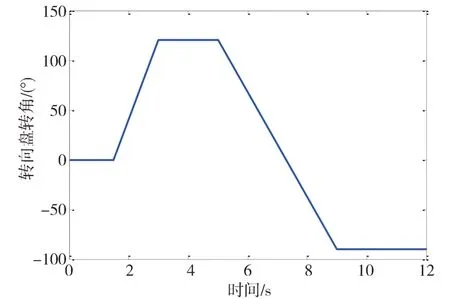
图6 鱼钩转向工况转向盘转角
首先进行了定车速鱼钩转向工况下的联合仿真测试,仿真中车速设定为90 km/h,所得的车辆状态估计结果如图7 所示。由于鱼钩转向工况下的转向盘转角及其变化率相对正弦转向工况来说都更加剧烈,故此时车辆的质心侧偏状况也相对较大。从而,鱼钩转向工况下,基于动力学模型的状态估计器的观测效果相对来说有所下降,而基于运动学模型的估计器此时效果更优。因此,该工况下的自适应权重系数相对较小,提高了运动学模型估计器在融合估计结果中所占的权重,从而可有效确保融合估计结果的估计精度。同时,由于车辆质心侧偏角的大小与轮胎侧偏角的大小直接相关,观察可知,在车辆质心侧偏角数值增大时,自适应权重系数倾向于被控制在一个较小的数值来提升估计精度,从而反映了融合估计方法的动态调节能力。
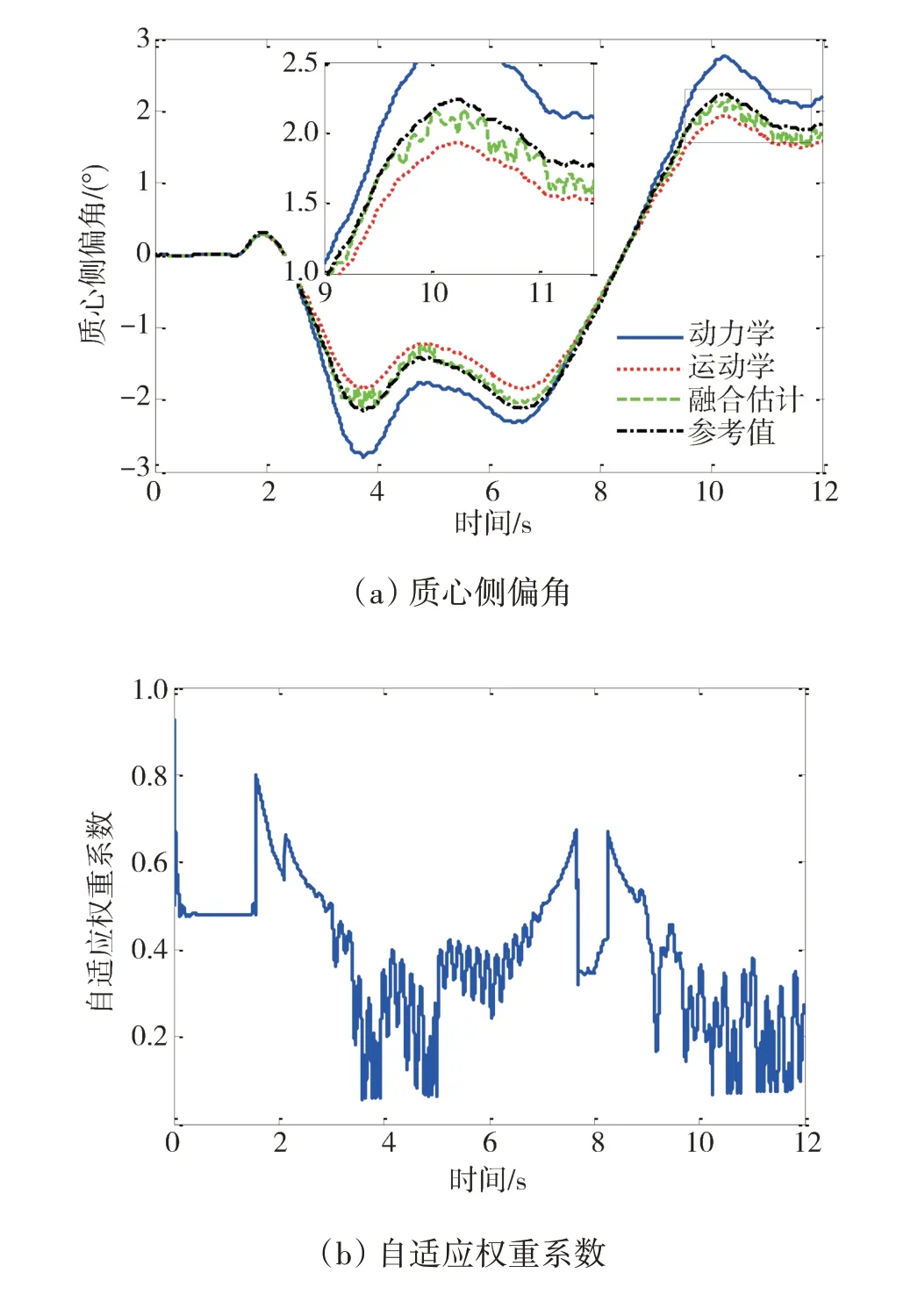
图7 定速鱼钩转向工况估计结果
此外,进行了变车速鱼钩工况下的车辆仿真测试,仿真中对应的车速变化情况如图8 所示,所得的车辆状态估计结果如图9所示。
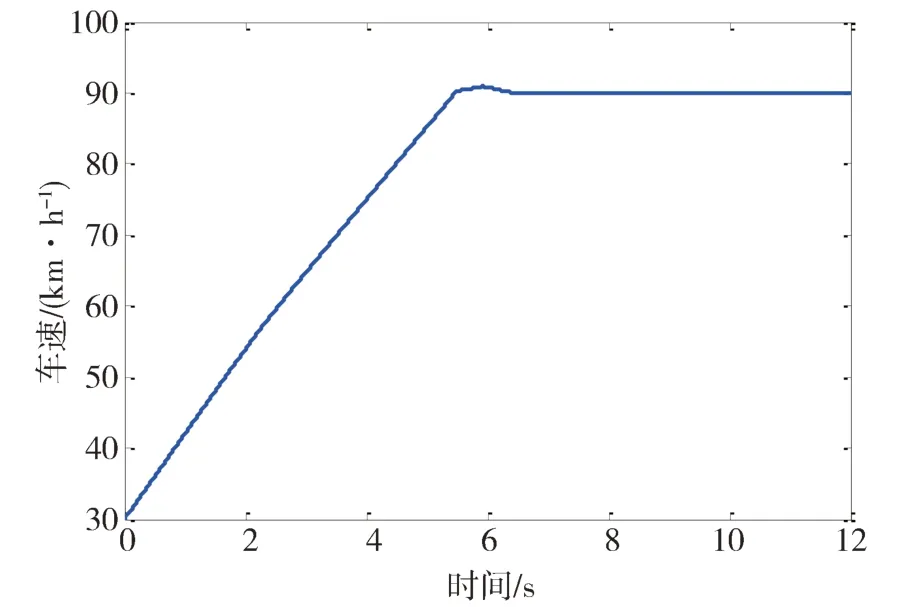
图8 车速变化情况

图9 变速鱼钩转向工况估计结果
同样地,由于转向盘转角和车速的剧烈变化,该工况下车辆质心侧偏角的幅值和波动变化也相对较大,同时,由于该工况下动力学模型估计器的估计效果有所下降,故此时自适应权重系数相对偏小,使得融合估计结果中运动学模型估计器所占比重增加,从而确保整体估计效果。通过对比正弦转向工况和鱼钩转向工况下的自适应权重系数可知,车辆起步初期,融合估计结果中倾向于对动力学模型估计器匹配较大的权重系数。这是由于车辆起步初期轮胎模型大多处于线性区域,且动力学模型估计器的动态响应能力相对更快。
4 试验验证
为进一步验证融合估计策略在车辆实际应用中的效果,进行了实车道路测试。实车道路测试条件如图10 所示。试验时,利用安装于4 个车轮处的轮速传感器采集四轮转速,利用GPS/INS 惯导系统采集车身姿态,前轮转角由转向盘转角传感器测量值转化得到,采用Vehicle SPY 对试验数据进行记录并保存于笔记本电脑。实车试验采集得到的车辆状态如图11 所示,试验验证结果如图12 所示。由图12可知,在实车应用中,基于动力学模型和基于运动学模型的车辆状态估计方法都能整体跟踪实际车辆行驶状态,同时,根据局部放大图可知,采用融合估计方式所得的车辆质心侧偏角具有更高的估计精度。此外,自适应权重系数能够随着车辆行驶状态的变化而动态调整,反映了融合估计方法的自适应调节能力。由于实际道路测试中的车速和转向盘转角与仿真工况对比都相对较小,故整体上来说自适应权重系数基本在0.6~0.9 之间变化,也就是说,在融合估计结果中基于动力学模型的质心侧偏角估计结果占有更大的比重。该分配趋势与理论设计和仿真结果中的权重分配方式相吻合,从而进一步验证所提出的融合估计方法在实车应用中的效果。

图10 实车道路试验
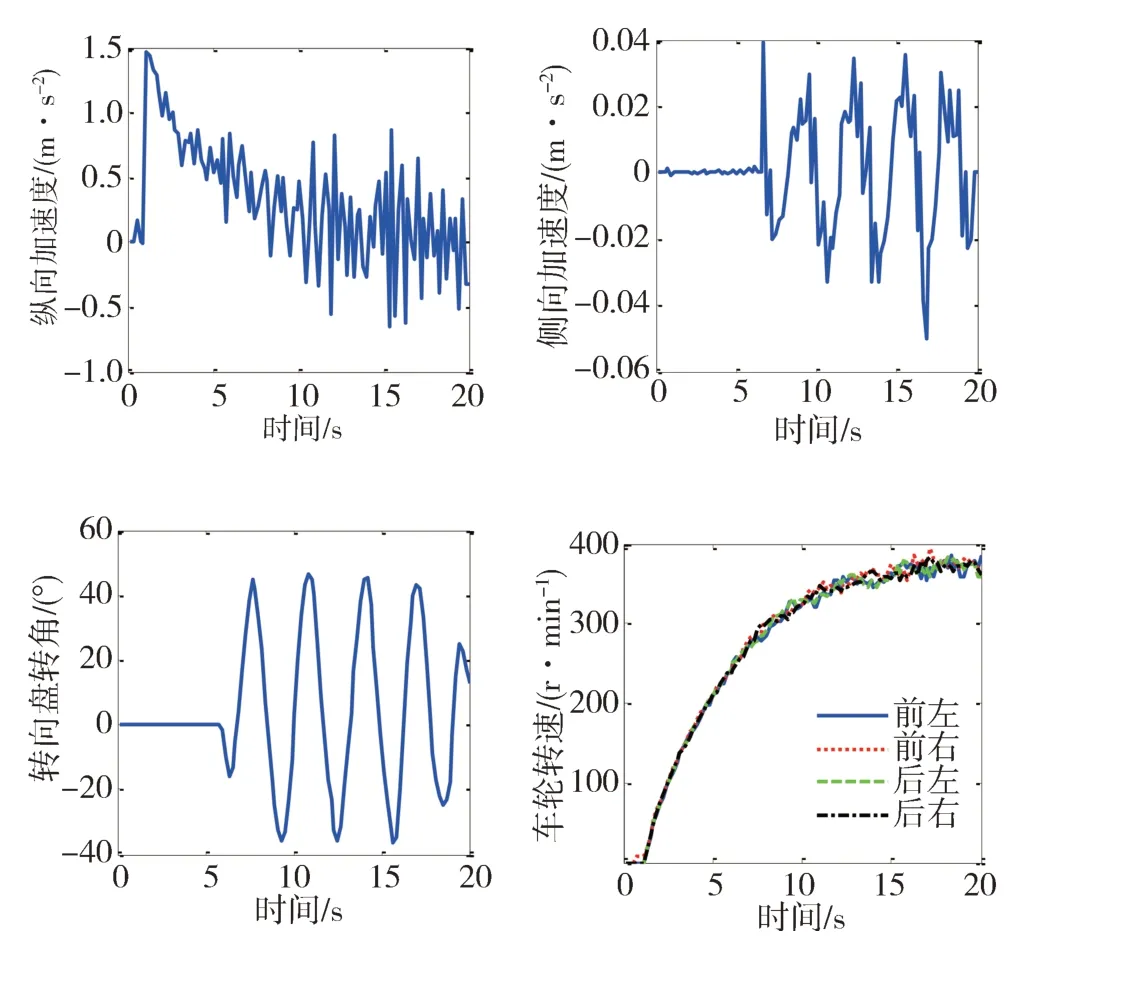
图11 实车道路试验车辆状态
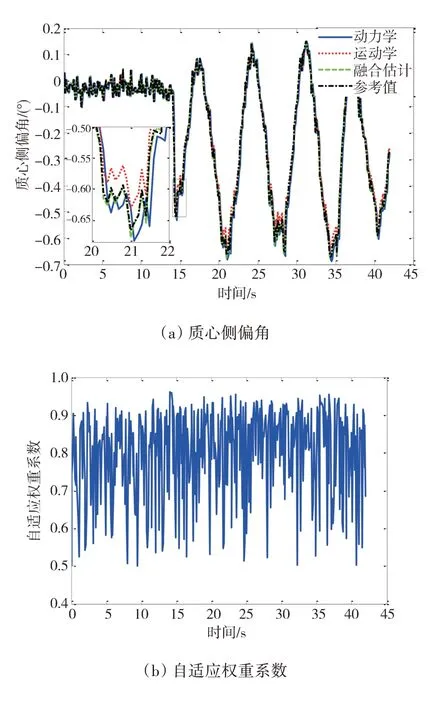
图12 实车道路试验估计结果
5 结论
(1)基于动力学模型的车辆状态估计器和基于运动学模型的车辆状态估计器适用于不同的车辆行驶状态。当轮胎侧偏角较大时,运动学模型估计器的估计精度相对较高,当轮胎侧偏角相对较小时,动力学模型估计器的估计精度相对较高。
(2)所设计的车辆质心侧偏角融合估计策略能够根据车辆行驶状态的变化而动态调节动力学模型估计器和运动学模型估计器之间的权重系数,从而提高融合估计效果。
(3)所提出的融合估计方法在正弦转向工况和鱼钩转向工况的仿真测试和实车道路测试中都能保持良好的估计效果,整体估计精度相比单独的动力学模型估计器和运动学模型估计器都得到了提升。