DoS攻击下基于多率采样的多智能体系统安全一致性
2022-02-28王悦贾新春
王悦 ,贾新春 ,游 秀 ,吕 腾
(1.山西大学数学科学学院,山西太原 030006;2.山西大学自动化与软件学院,山西太原 030013)
1 引言
近几十年来,多智能体系统(multi-agent systems,MASs)的协同控制由于其广泛的应用领域吸引了众多专家学者的关注.一致性问题作为多智能体系统协同控制领域的一个基本问题,其控制目标是设计一个合适的控制协议,在智能体受到共享通信网络资源的限制下,仍能使所有智能体的状态或者输出收敛到一个常值[1-2].而由于通信网络的引入,诸如通信资源的消耗和网络攻击的影响等,给MASs的一致性分析带来巨大的挑战.
大多数现存的文献都集中于基于连续通信的MASs控制研究,这就意味着智能体需要足够强的计算能力和理想的通信环境,这对数字网络环境下的MASs来说并不现实.近年来在网络化控制系统中已有很多关于采样方法的优秀成果,例如文献[3-5].此外,专家学者们对在采样环境下MASs的研究做出了很多努力[6-9].在现存文献中,采样框架大致分为两类: 同步采样和异步采样.前者为每一个智能体的状态或输出由不同的传感器节点在同一时刻被采样;后者则是不同的智能体传感器有不同的采样周期.例如,文献[7]和文献[8]分别研究了一类线性MASs在同步采样和异步采样策略下的一致性问题.文献[9]在此基础上,分别针对二阶MASs,在同步非均匀采样与异步非均匀采样策略下,提出了新颖的基于连续-离散时间观测器的一致性分布式协议.但是这些采样方法都是基于单率采样策略,即智能体所有的量测分量都在相同时刻被传感器采集,这对一些实际的工业应用来说较难实现.因此,控制系统的多率采样的策略应运而生.
实际上,不同类型的传感器组对智能体不同量测分量进行采样时的采样周期一般是不同的.比如在车辆横向控制中,往往使用超音速传感器对车辆的位移和速度进行采样,而对角速度和横摆角的采样则使用陀螺仪传感器[10].这是由于智能体不同量测分量的物理特性造成的,若采用单率采样策略,对保证系统性能来说具有一定的保守性.因此,为了保证系统的实时性并提高数据的利用率,就有必要研究控制系统的多率采样策略.此外,由于多率采样策略下MASs一致性的分析较为复杂,目前大部分关于多率采样策略的研究局限于网络化控制系统[10-12],最近,文献[13]研究了一类异构MASs在多率采样下的输出一致性问题.然而关于MASs在多率采样下的一致性问题的研究仍然存在一些挑战,这是本文的主要研究动机之一.
另一方面,随着网络技术的发展,网络安全对保证系统性能方面来说至关重要.严重的网络攻击会破坏系统的控制性能,甚至导致系统大范围瘫痪.拒绝服务(denial-of-service,DoS)攻击[14-19]作为一种最常见和最具破坏力的网络攻击之一,其目的是通过阻止智能体之间的信息传输来破坏系统的稳定性.文献[16]和文献[17]分别针对受到周期性DoS攻击和一般DoS攻击的MASs的事件触发安全一致性问题进行了研究.文献[18]进一步考虑了针对多条通信链路独立进行DoS攻击的情况,提出了一个新颖的分布式安全控制器.然而,这些文献中大都采用同步/异步采样策略或者事件触发方法,为了使MASs在DoS攻击下仍然能够表现出良好的控制性能,研究此类系统在多率采样策略下的一致性控制问题在理论上具有一定的挑战性.这是本文的第2个主要研究动机.
受上述研究内容的启发,本文针对一类带有多率采样的线性MASs,考虑智能体之间通信链路存在DoS攻击的情况,运用李雅普诺夫稳定性理论和切换系统理论,提出一个安全一致性控制器,实现了MASs的安全一致性控制.通过为每一个智能体引入一个匹配缓冲器,解决了由多率采样引起的智能体各采样分量的时序不同步问题,并且获得了包含DoS攻击持续时间和频率的一致性条件.本文的主要贡献总结如下:
1) 不同于文献[6-8]采用的单率采样,本文研究了带有多率采样的MASs的一致性问题,不仅避免了智能体之间的连续通信,且提高了数据的实时性和利用率,使得系统能够更快速地达到一致性;
2) 不同于文献[9-13]和[14-19],本文同时考虑了多率采样与非理想通信网络环境.在DoS攻击下,设计了一种新颖的基于多率采样的安全切换控制器.在所提控制策略下,MASs能够达到指数一致性.
2 准备工作和问题描述
本文使用标准符号.Rn表示n维欧式空间;Rn×m表示n行m列实矩阵的集合.IN表示适当维数的单位矩阵;1表示n维全1列向量;Np表示从1到p的整数集,N+表示正整数集.diag{.}为对角矩阵.col(...)表示列向量.对于实对称矩阵P,PT表示矩阵P的转置;P >0意味着矩阵P是正定矩阵.矩阵A和B的克罗内克积记为A ⊗B.对于给定的两个集合Γ1和Γ2,Γ1Γ2表示在Γ1中Γ2的相对补.‖.‖表示向量或矩阵的范数.λmax(A)和λmin(A)分别表示矩阵A的最大和最小特征值.
2.1 代数图论
考虑无向图G{V,E,A},其中V{v1,v2,...,vN}表示节点集,有限非空集I{1,2,...,N}为节点序号集,用E ⊆V×V表示边集,A[aij]RN×N为图G的邻接矩阵.当节点vi能够收到vj的信息,即边(vi,vj)时,aij1;否则aij0.智能体i的邻居集合用Ni表示.图G的拉普拉斯矩阵为L[lij],lij-aij,;lij-aij,∀ij;lii.定义λ1≤λ2≤...≤λN为L的特征值.
2.2 问题描述
考虑一类带有N个智能体的同构线性多智能体系统.智能体i(i1,2,...,N)的动力学描述如下:
其中:xi(t)Rn和ui(t)Rm分别为第i个智能体的状态和控制输入.Rn×n和Rn×m为适当维数的已知常矩阵.假设矩阵A不是赫尔维兹的,但矩阵对(A,B)是可镇定的.
在本文所提出的多率采样策略中,引入了匹配机制来解决时序不同步问题,该匹配机制中包含一个匹配缓冲器,即每个智能体i的状态分量xiβ(t)被相应的传感器组Siβ独立采样并传输到缓冲器bufferi中.bufferi的作用是,只要有一组传感器将采样得到的数据传输到缓冲器时,缓冲器就将智能体i的各状态分量组合打包为一个数据包,将其发送到智能体i的收发器.然后收发器将这个数据包传输给邻居智能体j.此时,在打包传输的状态值中只有一个或几个状态分量得到更新,其他状态分量仍然使用前一时刻的采样值.
注1一般地,每个智能体配置有多个传感器,不同物理属性的传感器一般有着不同的有效采样率范围,它们是由传感器的物理属性决定的,即多率采样.为了简化问题,现有文献大多假设单个智能体内配置的传感器组的采样率fi是相同的,即单率采样.若所有智能体的采样率相同,即fifj,i,j ∈I,则把这样的采样策略称为同步采样;若至少有两个智能体的采样率不同,即fi fj,i,j ∈I,则称为异步采样,详情见文献[13].通过设置缓存器使得控制器中数据的更新以所有采样分量的最小公倍周期为公共采样周期,即所有状态分量采样周期相同时,多率采样就转化为了单率采样.因此,可以把单率采样看作多率采样的特例,在第4节仿真部分将进行相应对比.
2.3 DoS攻击模型
定义σ(t)为攻击信号,当攻击者发动DoS攻击时,σ(t)0,否则σ(t)1.本文使用了攻击确认机制,通过σ(t)确定攻击何时开始和结束.此外,关于攻击检测算法的研究也越来越多[20].σ(t)的数学描述如下:
假设在初始时刻t0,σ(t0)1.
受平均驻留时间(average dwell time,ADT)概念的启发,对攻击持续时间和攻击频率做出如下假设:
假设1假设初始时刻为t0,对于任意的t >t0,在[t0,t)内DoS攻击的持续时间为Πa(t0,t).存在常数Π0>0,1/[0,1)使得
其中|Πa(t0,t)|和1/T分别表示Πa(t0,t)的勒贝格测度和攻击强度.
假设2假设初始时刻为t0,对于任意的t >t0,在[t0,t)内DoS攻击的次数定义为|n(t0,t)|.存在常数n0>0,τD >0使得
注2假设1和假设2在一些文献中是很标准的假设.假设1中的标量1/T表示在长时间间隔内,攻击持续时间平均率的上界.例如,当1/T0.75时,总攻击时长不能超过总时间跨度的75%.如果攻击从t00时刻开始,那么攻击间隔长度的上界就为τ≤Π0/(1-1/T).因此,标量Π0可以作为描述攻击者初始能力的参数.相应地,式(5)中的标量1/τD表示在长时间间隔内攻击频率的上界.
2.4 控制目标
本文的控制目标是,在存在DoS攻击的情况下,针对带有多率采样的多智能体系统设计一个合理的安全控制策略,使得对于任意的初始条件,智能体的状态满足
其中i,j1,2,...,N.
3 主要结论
在本节中,将提出针对带有多率采样的线性多智能体系统的一个安全控制策略.通过分析受DoS攻击影响的闭环系统的稳定性,得到了仍然能够保持一致性性能的关于DoS攻击持续时间和频率的充分条件.
3.1 控制器设计
考虑在DoS攻击下,带有多率采样的多智能体系统(1),为每一个智能体i()设计如下形式的安全控制器:
其中:Np,kN+.多率采样初始时刻0.例如,假设每个智能体有两个状态分量,各状态分量xi1(t),xi2(t)()与控制器ui(t)的更新时刻在图1给出.

图1 多率采样时刻及控制器更新时刻Fig.1 The multi-rate sampling instants and the controller updated instants
注3从图1中可以看出,在多率采样下,只要有任一分量更新,则控制器更新;而在单率采样下,控制器需要等待一段时间才能更新,因此其更新次数明显少于多率采样.当发生DoS攻击时,由于控制器收不到来自邻居的信息,则控制器不更新.
注意到,联合误差项φi(t)的取值依赖于攻击信号σ(t).当智能体之间进行正常通信时,φi(t)否则,当时刻时通信信道被DoS攻击阻断,则φi(t)0.本文的安全控制策略整体框架如图2所示.图中每个智能体的匹配机制中包含一个缓冲器,其运行原理已在第1.2 节中详细介绍,此处不再赘述.

图2 拒绝服务攻击下带有多率采样的多智能体系统安全控制框架Fig.2 The secure control framework of MAS(1)with multi-rate sampling under DoS attacks
3.2 一致性分析
然后,闭环误差系统可以进一步表示为
容易得到
令δ(t)[(ε(t)e(t))]T,可得
其中:
在给出主要结论之前,为了书写简便,引入一些符号.令
定理1考虑无向连通图G,在DoS攻击满足假设1和假设2的条件下,带有多率采样的多智能体系统(1)在设计的控制协议(7)控制下,对于给定的常数µ1>0,µ2>0,如果存在矩阵P >0使得下列黎卡提不等式成立:
并且满足
则称带有多率采样(8)的多智能体系统(1)在受到DoS攻击影响下仍然能够达到一致性,且控制增益矩阵KBTP.
证考虑如下李雅普诺夫函数:
其中Ωdiag{IN ⊗P,IN ⊗P}.
情况1多智能体系统(1)没有受到DoS攻击.显然,当(0,∞)时,从式(17)可以得到
基于式(14)和杨氏不等式,可以推出
因此,对于(0,∞)可得
情况2多智能体系统(1)受到DoS攻击.
基于式(15),有
因此,对于(0,∞),不难得到
综上,从上述分析中可得
在假设1和假设2下,进一步可以推出
则式(23)可以重写为
然后,有
注4对于不等式(14)-(15)解的存在性证明,可具体参考文献[20].式(14)中通信拓扑已知且对于给定的µ1>0总有一个对应解P,其数值解可通过MATLAB 线性矩阵不等式工具箱求得.式(15)可写作P(A-+(A-TP<0为李雅普诺夫不等式,一定存在解P >0使得式(15)成立.
4 数值仿真
在本节中,给出了一个仿真例子来验证所提控制协议的有效性.考虑一组含有4个智能体的同构多智能体系统.智能体i(i1,2,3,4)的动力学如下:
在本文中,假设不同类型的传感器组有不同的采样周期,即多率采样.每一个智能体有两个状态分量,并且状态分量xi1和xi2(i1,2,3,4)的采样周期分别为0.05 s和0.09 s.智能体之间的通信拓扑如图3所示.在本例中,智能体仅使用采样数据用于更新控制器和智能体间的通信.值得注意的是,当DoS攻击发生时,采样数据不可用.

图3 智能体之间的通信拓扑Fig.3 The communication topology among agents
根据定理1,可以计算得到控制器增益矩阵K[0.4151 1.0671].然后对于给定的初始状态x1(0)[2 1]T,x2(0)[-3 2]T,x3(0)[5 0.5]T和x4(0)[-1-3]T,图5和图6分别给出了在本文所提方法和文献[21]中方法下,智能体的状态轨迹演化过程.其中,DoS攻击的开始时刻和持续时间均有随机函数随机生成,DoS攻击时序在图4给出.

图4 随机生成的DoS攻击时序Fig.4 Randomly generated DoS attack time sequence
从图5中可以看出,在多率采样下,第1次和第2次DoS攻击之间智能体的两个状态分量受其影响有小范围的波动,但之后的几次DoS攻击并没有对多智能体系统的一致性造成破坏,并且在大概15 s达到了状态一致.图6给出了使用文献[21]中控制方法得到的受DoS攻击影响的多智能体系统(1)各智能体状态分量的响应.从图6中可以看出,在单率采样机制下,所有智能体的状态在30 s左右达到一致性.由此得出,在多率采样机制下受到DoS攻击影响的多智能体系统一致性收敛速率更快,效果更好.
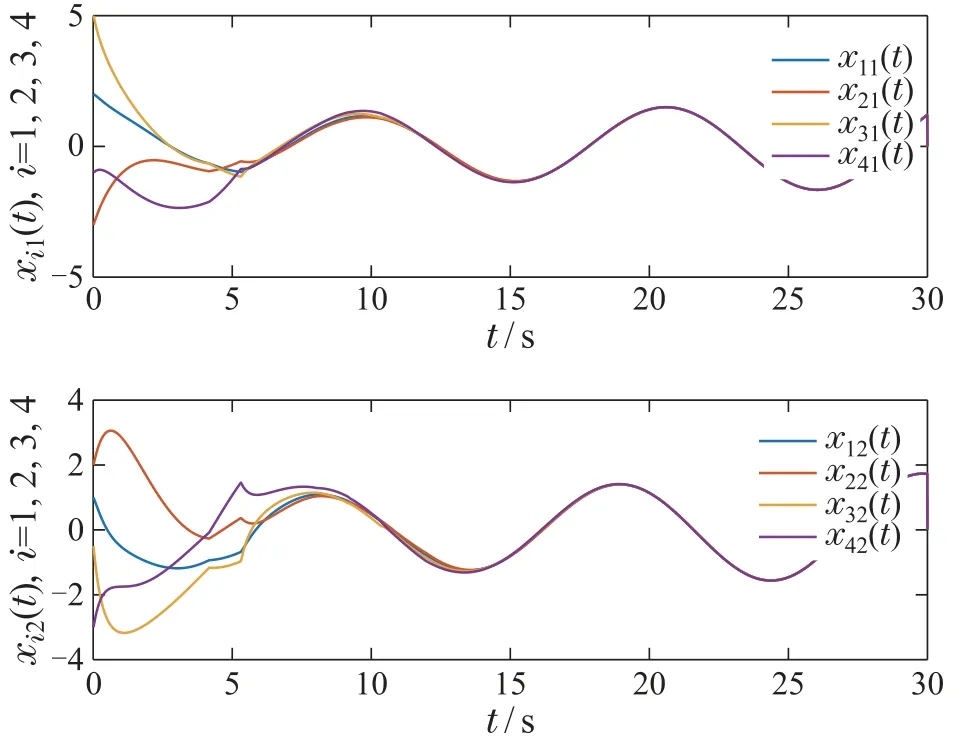
图5 使用本文所提方法得到的多率采样下多智能体系统(1)在DoS攻击下的状态分量xi1(t),xi2(t)(i1,2,3,4)的响应Fig.5 The response of state variable xi1(t),xi2(t)(i 1,2,3,4)of MAS(1)with multi-rate sampling under DoS attacks using the proposed method
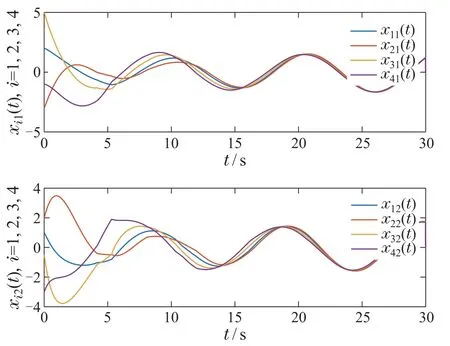
图6 使用文献[21]控制方法得到多智能体系统(1)在DoS攻击下的状态分量xi1(t),xi2(t)(i1,2,3,4)的响应Fig.6 The response of state variable xi1(t),xi2(t)(i1,2,3,4)of MAS(1)under DoS attacks using the method in [21]
5 结论
本文对在DoS攻击下,带有多率采样的线性多智能体系统的安全一致性控制问题进行了研究.通过对攻击持续时间和攻击频率的限制得到了实现安全一致性的充分条件.仿真和实验结果表明,所设计的安全控制器可以保证带有多率采样的多智能体系统实现安全一致性,并与单率采样进行了性能对比.未来我们将研究更一般的网络攻击下带有多率采样的多智能体系统的安全协同问题.
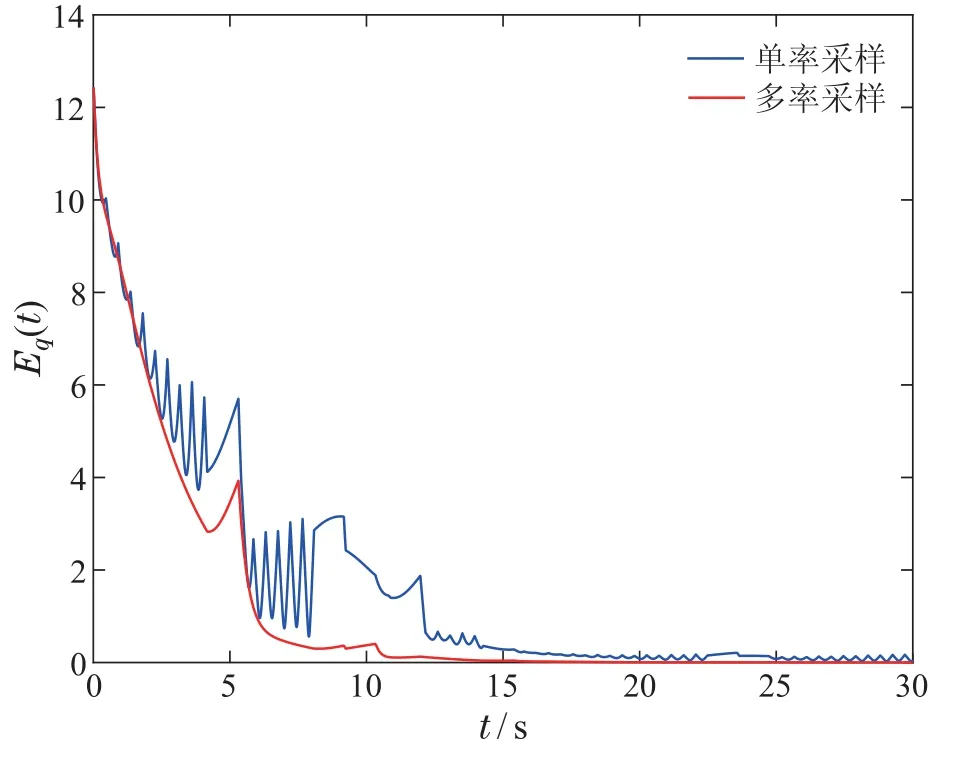
图7 多智能体系统在DoS攻击下的单率采样与多率采样性能对比Fig.7 Single-rate sampling and multi-rate sampling performance comparison of multi-agent systems under DoS attacks
