基于电场传感器阵列的无人机输电线跟踪与定位方法*
2022-02-28赵加文索春光张文斌黄汝金颜沛武
赵加文, 索春光, 张文斌, 李 鹏, 黄汝金, 颜沛武
(1.昆明理工大学 理学院,云南 昆明 650504; 2.昆明理工大学 机电工程学院,云南 昆明 650504)
0 引 言
随着电力系统的不断发展,高压架空电力线路的规模得到空前增长,近年来无人机(unmanned aerial vehicle,UAV)自动巡检输电线带来了工作效率的提升以及弥补了手动操控UAV缺陷[1],但同时也带来了诸多挑战。文献[2]提出了一种杆塔和导线跟踪算法,在已知UAV当前的位置以及巡检线路中杆塔全球定位系统(GPS)信息的前提下,利用GPS信息快速计算出两点间距离,但GPS测距的精度较低,必须建设大量的基站,成本较高;文献[3]提出了一种基于视觉的UAV输电线路检测方法,但当出现大雾天气看不清楚输电线时,就无法实现自主巡检;文献[4]利用LiDAR通过快速获取线路通道高精度三维点云数据来规划飞行航向实现自主巡检,但从无序的激光点云中提取出电力线路和塔台信息需要大量的数据,检测效率较低。文献[5,6]表明,载波相位实时动态(real-time kinematic,RTK)差分技术也可以实现UAV的自主巡航,其定位精度可达厘米级,但需要建立参考基站或者有稳定快速的网络覆盖以提供虚拟基站,而架空线路分布广,难以实现RTK基站的全覆盖。文献[7,8]依据输电线周围磁场信息计算输电线相对于UAV的位置,但是在实际输电线路由于存在非线性负荷的影响,输电线路中的电流及其产生的磁场不稳定,计算结果也就存在不确定性。文献[9]提出了一种基于多传感器数据融合的UAV安全距离诊断方法,其中就包括UAV获取到的场强信息,但是此方法并没有计算出UAV与输电线的距离,不能应用于UAV自动巡检输电线;文献[10]利用电场传感器阵列实现了对于空中带电体的定位,但针对的对象与输电线存在较大差异,不能应用于UAV实现自动巡检;文献[11]提出了一种基于电场信息的UAV导航定位系统,但将三相输电线看作一个场源而得出的结果,实际三相输电线下场强分布复杂,两者存在较大的差异。
为了解决上述方法的不足,本文提出了一种基于电场传感器阵列的输电线跟踪及定位方法。通过搭建电场传感器阵列,计算出了UAV当前航向角的偏转大小、输电线相对于UAV的距离以及仰角。
1 输电线跟踪及定位理论推导
许多研究表明[12,13],交流架空输电线路在周围空间存在工频电场,空间观测点的电场强度与距输电线的距离直接相关。且工频电场传播的距离也很长,电场强度不受到环境光强度和环境温度的影响,适应性较高。并且实际输电线路中电压是稳定的,其产生的电场也是稳定的。因此,本文采用电场信息实现输电线的跟踪及定位。
要实现对于输电线的跟踪及定位,需要根据电场信息计算出如下三个参量:1)UAV的航向角偏转大小:航向角指的是UAV机头与UAV巡线方向的角度偏差,UAV通过控制航向角的偏转大小实现对于输电线的跟踪;2)输电线相对于UAV的距离:传感器阵列中心与输电线的距离;3)输电线相对于UAV的仰角:仰角反映出UAV相对于输电线的具体方位。
如图1,将输电线看作均匀带电的直导线,长为L,总电荷量为q,假设线外有一点P,距离直导线的垂直距离为ρ,P点和直线两端连线的夹角分别为θ1和θ2。设线电荷密度为λ,真空介电常数为ε0。
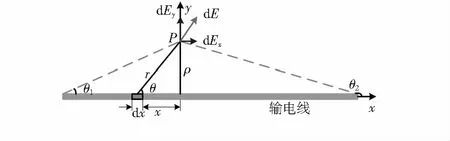
图1 输电线示意
取一电荷元
dq=λdx
(1)
根据点电荷的场强公式,则有
(2)
(3)
根据式(2)、式(3)可得出在X方向和Y方向的场强分别为
(4)
(5)
由于UAV本身的尺寸远远小于输电线的长度,因此,可以将输电线看作是无限长的直导线,θ1=0,θ2=π。则有
Ex=0
(6)
Ey=λ/2πε0ρ
(7)
(8)
通过式(7)可以知道,如果在输电线周围放置一个电场传感器,已知输电线的线电荷密度λ,可以根据传感器测到的电场强度计算出传感器与输电线的距离。但在UAV实际巡检输电线路的过程中,该参数是不确定的,无法通过一个传感器计算出距输电线的距离。
如果放置2只传感器,2只传感器与输电线的位置关系如图2所示。
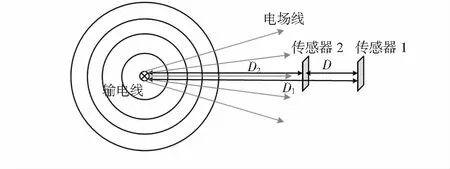
图2 2只传感器与输电线位置示意
根据式(8)和2只传感器之间的位置关系,可以得到如下关系式
(9)
上述中,2只传感器之间的间距D是已知的,所以根据2只传感器所测得电场值能够计算出2只传感器距输电线的距离
(10)
要实现UAV对于输电线的定位,除了计算出UAV距输电线的距离,还需要知道输电线所在的方位,而根据2只传感器无法计算出方位信息,因此,需要在输电线周围放置两个以上传感器,根据各只传感器之间的位置关系求解出当前传感器相对于输电线的位置。基于此,搭建了如图3(a)所示的传感器阵列,可以看到,g1,g2,g3,g 4 四只传感器位于圆阵上均匀分布,g0传感器位于圆阵的中心。
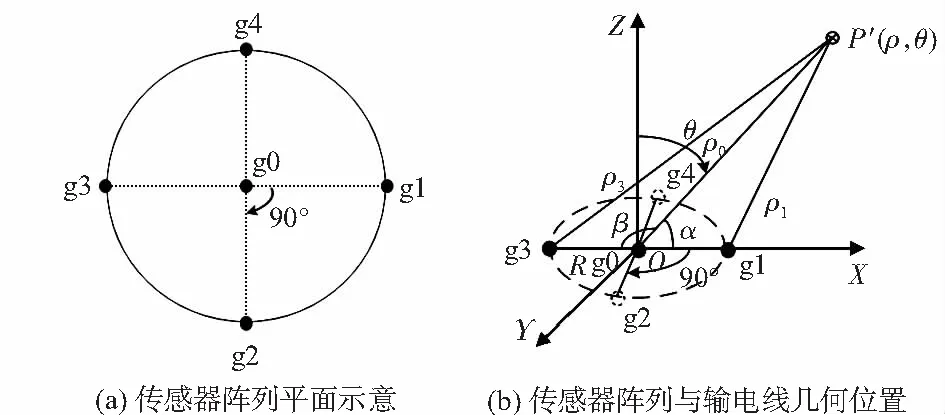
图3 传感器阵列
UAV与输电线的距离以及仰角通过g3,g0和g1 三只传感器感应到的电场强度以及传感器与输电线的几何关系推导得出。其中,g3,g0和g 1 三只传感器所在的直线与输电线垂直,传感器阵列与输电线的一个空间位置示意图如图3(b)所示。
根据图3(b)中传感器阵列与输电线的几何位置关系,在△P′Og1中,使用余弦定理可得
(11)
在△P′g3O中,根据余弦定理
(12)
根据三角形的诱导公式,联立上述两个方程可得
(13)
另外,根据式(8)则可得如下关系
(14)
联立式(13)、式(14)可得
(15)
(16)
式中ρ0为传感器阵列中心传感器g0距离输电线的距离,ρ1为传感器g1距离输电线的距离。
联立式(11)、式(15)和式(16)可以求得
(17)
式中α为输电线相对于UAV的仰角。
图4是UAV搭载传感器阵列进行巡线的示意图,当g2,g0和g4传感器所在的直线与输电线平行时,两只传感器感应到的电场强度相等。当g2,g0和g4所在的直线与输电线相交时,两个传感器所感应到的电场强度不相等。基于此,就可以使用g2和g4两只传感器感应到的电场强度之间的差值来控制UAV沿输电线飞行时的航向角偏转大小。
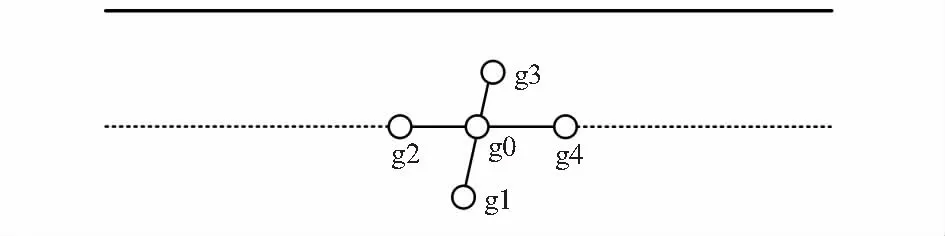
图4 UAV巡线示意
Δφ=E4-E2
(18)
式中E4和E2分别为g4和g2两只传感器感应到的电场强度,Δφ为UAV航向角的偏转大小。
2 电场传感器与硬件系统设计
为了通过实验验证方法的可行性,设计了平行板电场传感器和信号调理电路,图5是平行板电场传感器的原理图和所对应的等效电路图。
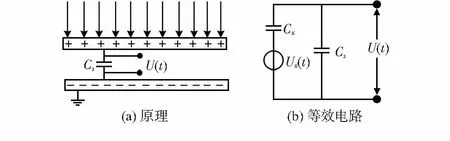
图5 电场传感器原理
图5(a)中,上下极板分别与采样电容Cs的两端相连,极板的感应电荷在取样电容Cs上产生的电压信号作为输出信号,其大小关系为
U(t)=Q(t)/Cs
(19)
由高斯定理可以知道,在电场E中的金属极板上有感应电荷的产生,感应电荷的面密度为σ,其中,ε为极板间介质的介电常数。被测电场的强度变化引起感应电荷数量的改变

(20)
式中Q(t)为极板的感应电荷量,E(t)为被测电场强度,S为感应极板的有效面积[14,15]。
将式(20)代入式(19)中可得
U(t)=(εE(t)S)/Cs
(21)
通过式(21)可以知道只要采集取样电容Cs两端的电压便可以得到该测量位置的电场强度。
为了提高测量准确性,根据文献[10]所述,设计了图8所示的带屏蔽环的电场传感器,从而削弱传感器阵列中传感器之间的相互干扰。图6(a)中正面是平行板电容器的上极板,正面的最外圈是屏蔽环;反面是平行板电容器的下极板。图6(b)是电场传感器的结构示意,通过结构示意图可以看到屏蔽环与下极板相连。
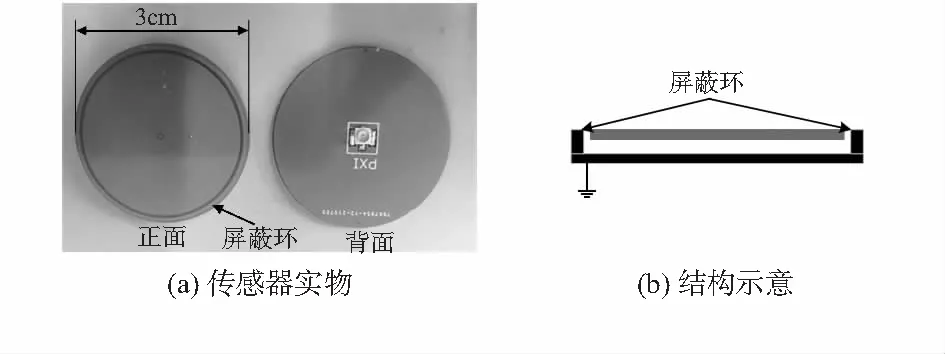
图6 电场传感器实物与结构
图7(a)是传感器阵列的硬件系统示意图,由电场传感器、放大电路、滤波电路和单片机组成。图7(a)中运放采用的是单电源供电,因此,最终输入到单片机端的信号是一个始终处于正半轴的半波信号。
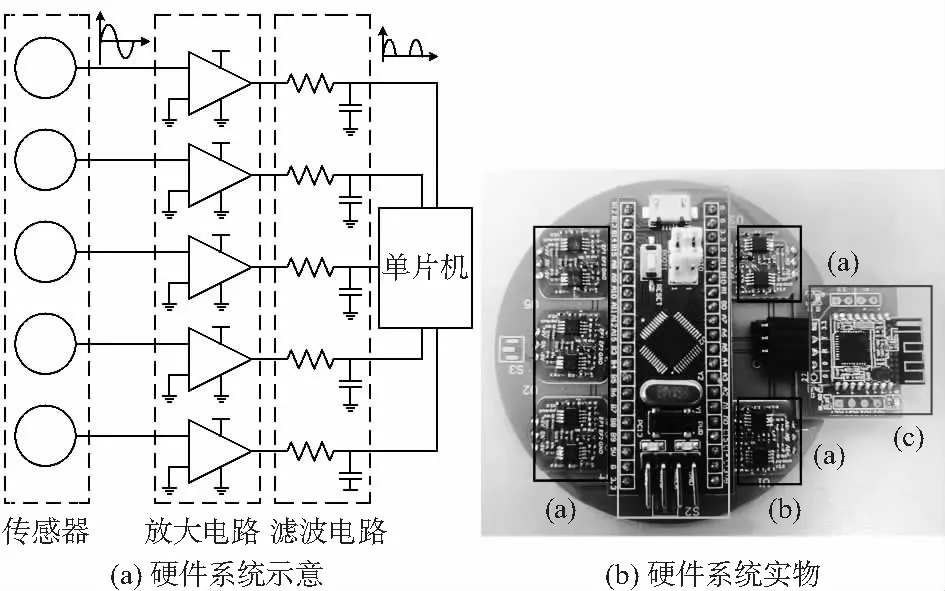
图7 硬件系统示意与实物
其硬件实物图如图7(b)所示,(a)为信号调理电路,将传感器采集到的信号进行放大并滤波;(b)为STM32最小系统板,作为当前数据采集系统的主控,能够运行FFT算法,提取出所采集到50 Hz频率成分的数据;(c)为蓝牙通信模块,通过无线传输的方式传输数据至PC端进行分析。
3 实验验证
在实验室环境中,搭建了5 kV输电线实验平台,其中,传感器阵列位于输电线的左下角,中心传感器g0距离输电线的距离ρ=0.6 m,输电线相对于传感器阵列的仰角α=45°。为了通过多组数据验证结果的正确性,将传感器阵列沿着输电线平行移动,保持ρ和α不变,每隔40 cm记录一组数据的值,一共记录10组。图8(a)是实验平台的示意,图8(b)是实验平台的实物。
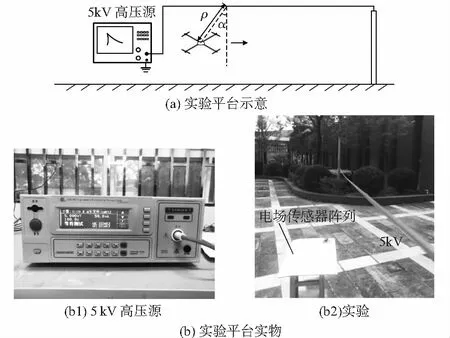
图8 实验平台示意与实物
将采集的各只传感器的数据进行FFT处理,图9是传感器阵列10组数据中其中一组数据的频谱图。
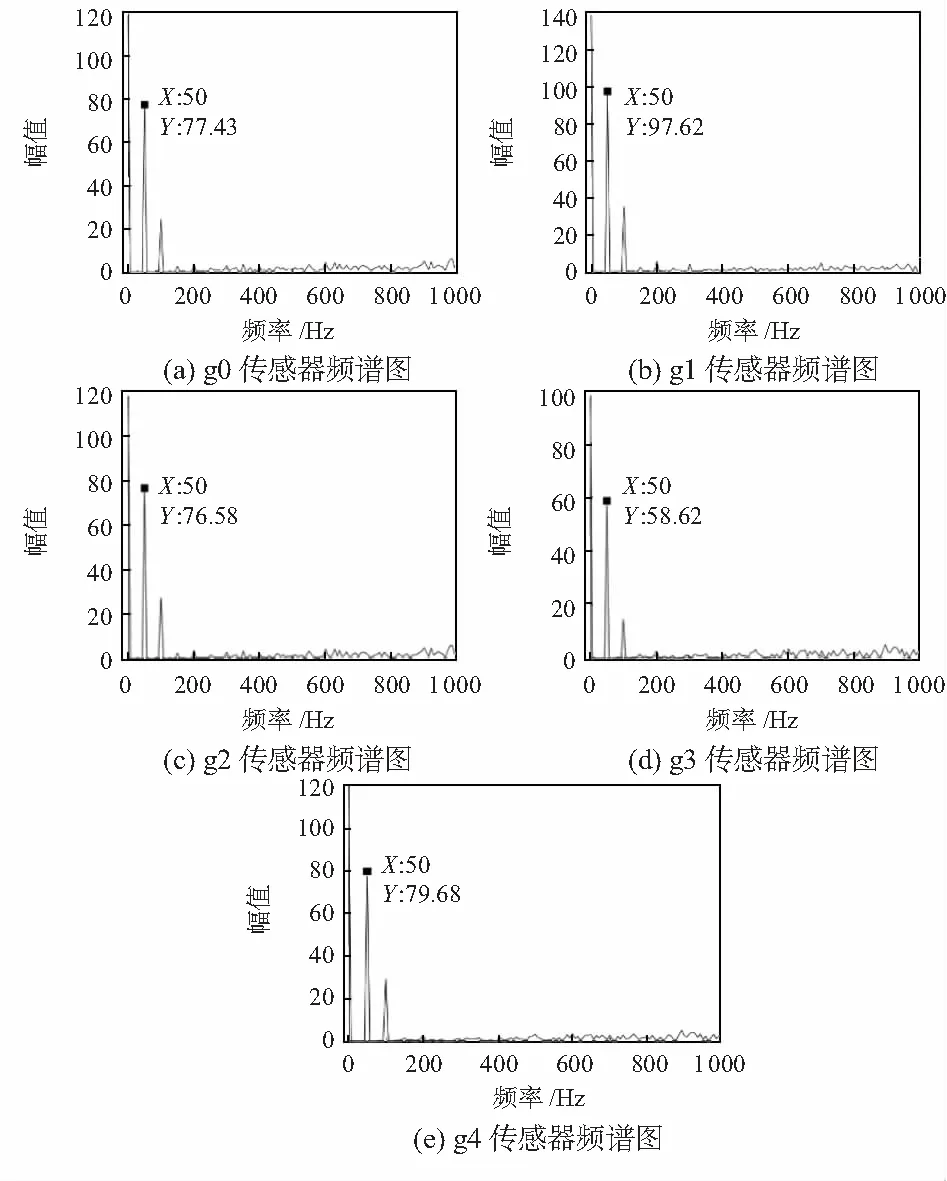
图9 传感器阵列频谱图
由上述频谱图可以看到,传感器阵列中平行于输电线的三只传感器g2,g0,g4在50 Hz频率成分的值相差不大,垂直于输电线的三只传感器在50 Hz频率成分的值随着距输电线的距离越远其所感应到的值就越小。
分别提取出10组数据中各只传感器50 Hz频率成分处的数据,根据式(18)计算出航向角的偏转角度,图10(a)是航向角偏转角度的曲线图。由图10(a)可以看到,因为是沿着直导线移动,理想情况下,所计算的航向角偏转角度应该一直是0,但是实际情况跟理想情况存在偏差,上述曲线图中,最大的绝对误差是5.74°。根据式(15)计算传感器阵列与输电线的距离ρ,图10(b)是在10个不同位置下所计算出的传感器阵列与输电线距离曲线图。由图10(b)可以看到,计算得到10组距离测量结果的最大相对误差为34.0 %,最大绝对误差为20.4 cm。根据式(17)计算输电线相对于传感器阵列的仰角α,图10(c)曲线是计算出的结果。
从图10可以看到,10组测量结果的最大相对误差为18.0 %,最大绝对误差为8.12°。
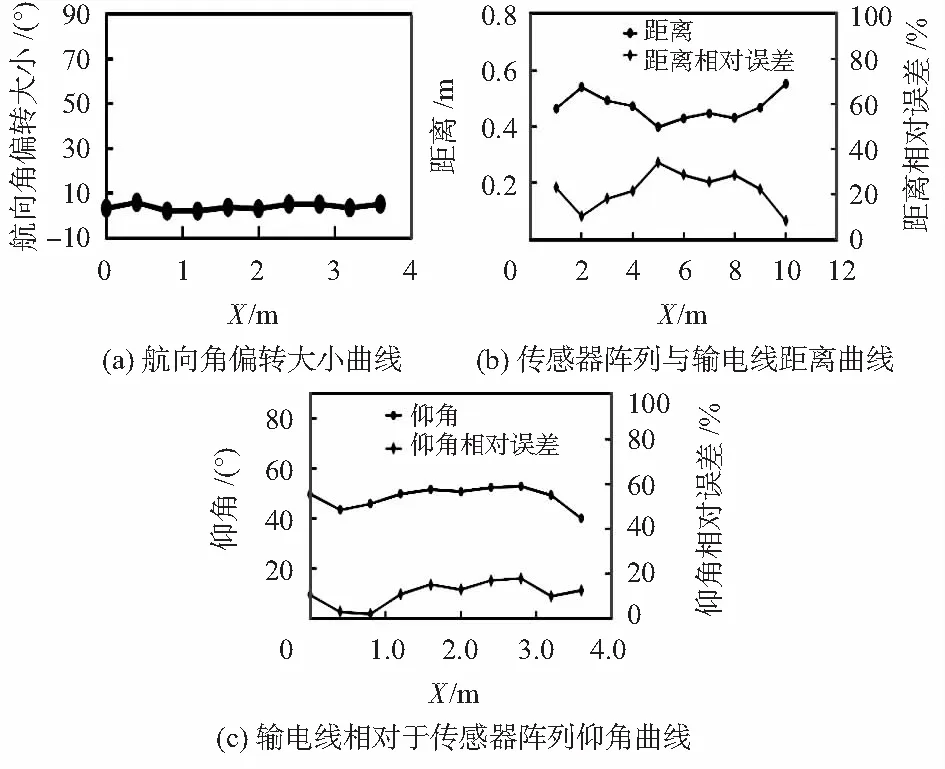
图10 实验测量结果
上述的计算结果显示,通过电场传感器计算出来的值与真实值存在一定的误差,但误差均在接受范围内。因此该方法能够应用于UAV实现自主巡检。
4 结 论
1)本文根据输电线的电场分布规律,搭建了电场传感器阵列,计算出UAV当前航向角的偏转大小、输电线相对于UAV的距离以及仰角,进而实现UAV对输电线的跟踪及定位。2)设计了带有屏蔽环的平行板电场传感器及信号调理电路。3)搭建了5 kV单相输电线实验平台,实验数据表明,当传感器阵列沿着输电直导线移动时,计算出的航向角偏转大小最大绝对误差为5.74°,传感器阵列与输电线距离的最大绝对误差为20.4 cm,仰角的最大绝对误差为8.12°,误差均在接受范围内,能够用于UAV实现自主巡检。
本文所提出的输电线仅仅是以一根输电导线进行研究的,实际UAV巡检的输电线大多是三相三线制的,而三相输电线由于电场的叠加会导致其与单根输电线的电场分布存在差异。因此,下一步还需要针对三相输电线场景进行研究,进一步优化当前的输电线跟踪及定位方法。
