基于萤火虫优化算法的不平衡网压下VSR自抗扰控制
2022-02-27曾国辉
姚 强,曾国辉,黄 勃,刘 瑾,韦 钰
(上海工程技术大学 电子电气工程学院,上海201620)
三相电压型PWM整流器(Voltage Source PWM Rectifier,VSR)是电能变换系统中的关键器件,具有网侧电流品质高以及直流侧电压较为稳定等优点,在微电网系统、变频调速系统和新能源发电等领域有着广泛的应用,在电力系统中起着至关重要的作用[1-3]。
在不平衡电网电压情况下,如果采用传统控制方法,三相VSR将在网侧产生大量电流谐波,并且网侧电流发生畸变,严重影响三相VSR的运行性能。因此寻找最优的三相VSR系统的控制方案具有重要意义。文献[4~5]利用模型预测控制策略来提升整流器系统的控制精度,但其需要在线评估所有开关状态作用下的预测结果,增加了计算量,系统难以实现实时控制。文献[6]将滑模变结构控制应用在PWM整流器中,在一定程度上保证了网侧电流正弦化。但是该研究并没有解决滑模控制自身存在的抖振,且直流侧电压存在较大超调量的问题。文献[7]将自抗扰控制与变结构相结合,减小了直流侧电压的超调量,但自抗扰控制器(Active Disturbance Rejection Controller,ADRC)的参数众多,参数整定较为困难。
针对上述三相VSR在不平衡电网中存在的问题,本文提出了基于萤火虫优化算法的自抗扰控制策略。自抗扰控制器通过对正负序电流分别进行控制,并对三相VSR内部的扰动进行补偿,同时抑制系统外部扰动,改善了整流器控制性能。自抗扰控制器参数众多,而传统参数整定方法一般依靠经验整定,故三相VSR控制的性能不能达到最佳。因此,本文采用群体智能优化算法来实现自抗扰控制器参数自整定[8]。本文将三相VSR作为控制对象,选用萤火虫优化算法对三相VSR电流内环中的二阶ADRC参数进行在线寻优,通过减少ADRC参数整定时间,提高了三相VSR性能以及闭环运行的可靠性。最后,在MATLAB的环境中仿真验证了所提方法的可靠性和优越性。
1 网压不平衡时VSR的数学模型
图1为三相VSR的拓扑结构,ea、eb、ec为三相电网电压,ia、ib、ic为交流侧电流,R和L分别为交流侧等效电阻和电感,RL为直流侧负载电阻。
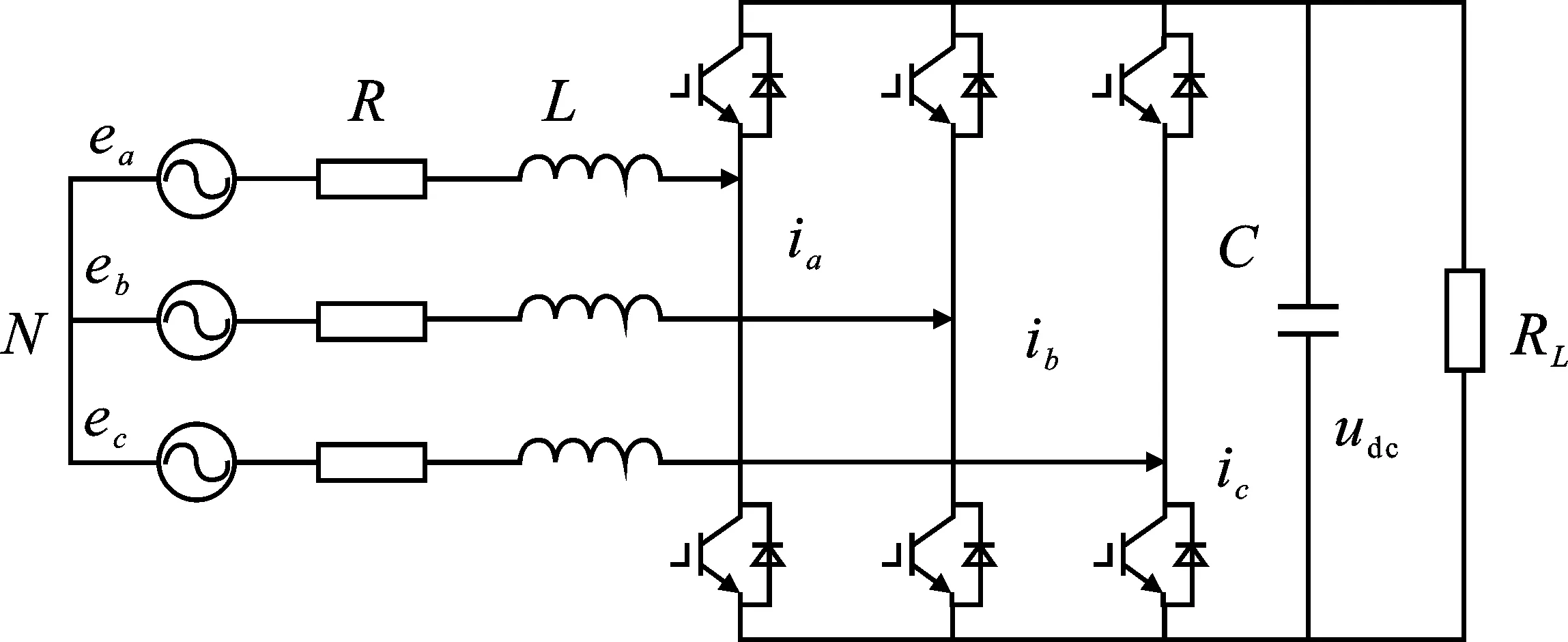
图1 三相VSR拓扑结构图Figure 1. Topology diagram of three-phase VSR
将三相电网电压和网侧电流进行正负序分离,然后经坐标变换得到edq和idq,根据拓扑电路推导出其状态方程如下[9-11]
(1)
式中,edp、eqp、edn、eqn、vdp、vqp、vdn、vqn、idp、iqp、idn、iqn分别是正、负序dq坐标系中网侧电压、整流桥输入电压和网侧电流。
三相VSR的复功率表示为
(2)
式中,S0代表直流分量,具体表示为
(3)
Srip代表谐波分量具体表示为
(4)
(5)
联合式(2)~式(5),即可得到三相VSR的瞬时功率为
(6)
式中,功率在稳态时的平均值分别为P0、Q0;电路系统中造成二次谐波功率的最主要因素是Pc2、Ps2;二次无功中含有谐波的成分为Qc2、Qs2[12-13]。将式(6)展开可得式(7)。
(7)
2 自抗扰控制器的结构
为了有效地控制整流器交流侧的负序电流,将式(7)中电流的负序分量的给定值设为0,即idnref=0,iqnref=0 ,Q0ref=0 ,即可得到正序电流的给定值[14],表示为
(8)
根据式(1)整理可得
(9)
式中,wdp、wqp、wdn、wqn为正负序d、q轴分量的总扰动值,并且利用ADRC控制器中的扩张状态观测器(Extended State Observer,ESO)对其进行估计。本文将idp、iqp、idn、iqn作为ADRC控制器的电流输入给定值。三相VSR电流自抗扰控制器结构如图2所示。

图2 自抗扰控制器结构图Figure 2. Structure diagram of ADRC
在非线性系统中,ADRC控制器是非常有效的工具。ADRC除了ESO之外,还包括另外两部分:一部分是跟踪微分器(Tracking Differentiator,TD),能够快速追踪电流信号的给定值;另一部分是非线性状态误差反馈器(Nonlinear State Error Feedback,NLSEF),主要负责对误差进行非线性组合,给出控制规律[15]。本文将这3部分进行如下设计:
(1)TD
(10)
(2)ESO
(11)
(3)NLSEF
(12)
(13)
式中,i1是输入电流参考值iref的过渡变量;i2是过渡过程i1的微分;h是步长;h0是滤波因子,具有滤波作用;r是快慢系数,决定过渡过程的快慢;一阶和二阶的状态变量z1、z2通过ESO观测得出;z3是总扰动量;b0是控制输入的放大系数;fal(·)是输出误差校正率;β01、β02和β03为修正系数,对ESO观测效果具有较大影响;NLSEF是对误差e1和e2进行非线性组合,并输出控制信号u0,β1和β2是其修正系数[16]。
由上述ADRC控制方程可知,非线性自抗扰控制器存在大量待整定的控制参数,其中参数β01、β02、β03、β1和β2对控制器起决定性作用,因此本文利用萤火虫算法(Firefly Algorithm,FA)对其进行寻优整定。对于其余参数,由于一部分参数变化敏感,而一部分参数对控制系统影响不大,因此可事先根据经验对其进行先行整定[17]。
3 基于萤火虫算法的ADRC参数优化
3.1 萤火虫算法
萤火虫算法是模拟萤火虫夜间聚集行为的一种随机优化算法。假定若干个萤火虫个体,其位置信息为Xi,即ADRC参数优化的解空间的一个值。以电流误差为荧光度,误差越大,荧光度也就越小。萤火虫群体将根据荧光度及吸引力进行移动。
构造萤火虫算法模型需要将一些条件进行理想化,因此需要做如下假设:
(1)萤火虫在算法模型里不会区分性别,只有更亮的萤火虫吸引较暗的萤火虫;
(2)越亮的萤火虫,其吸引力也越强,暗的萤火虫趋向于亮的萤火虫,并且向其靠近;
(3)假设没有更亮的萤火虫,该萤火虫将会因为没有目标萤火虫而进行随机移动,直至出现更亮的萤火虫。
环境中的各种变化因素都会影响到萤火虫个体的荧光度和吸引度,其表达式为
(14)
式中,I0为初始荧光度,距离越远,荧光度会越弱;β0为光源处的吸引力;γ为光吸收系数,不同的传播媒介其系数会不同。在算法模型中,默认所有萤火虫都处于同一环境,一般将其设为定值;萤火虫能相互感知的距离有一定限度,若超出限度距离,萤火虫将无法接收信息,萤火虫个体之间的实时距离可以用rij表示。
萤火虫个体会不断趋向荧光度较强的个体,在这个过程中,萤火虫的位置也会不断更新,逐步逼近最优位置。移动的距离由下式来决定
(15)
式中,两只不同的萤火虫个体i、j所处的空间位置分别是Xi、Xj;T是FA算法的迭代次数;β(rij)表示萤火虫i、j之间的吸引力,;α为在[0,1]的范围内任一随机常数;μj符合高斯分布[18]。
3.2 萤火虫算法优化策略
本文采用萤火虫算法来实现ADRC参数自整定,其核心思想是对待整定参数进行不断地设置和优化调整,最终得到最优的ADRC参数。整定流程如图3所示。
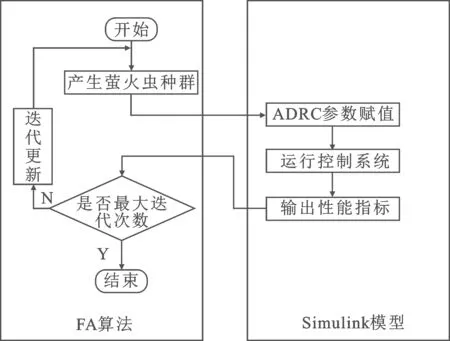
图3 FA整定流程图Figure 3. Flow chart of tuning through FA
在评价控制器性能时,目标函数对个体性能评估起指导作用。时间乘以误差绝对值积分可作为量化性能的指标。当其值最小的时候,即代表控制系统的性能最佳。ITAE(Integral Time Absolute Error)表达式为
(16)
式中,e(t)为电流参考值与实际值的误差;t为时间。在整定过程中,目标函数会逐渐收敛到一个最小值,此时达到最优解,其曲线如图4所示。
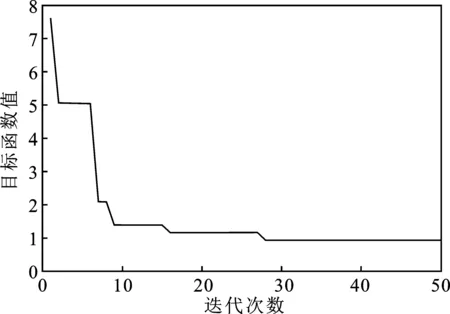
图4 目标函数收敛曲线Figure 4. Convergence curve of objective function
基于萤火虫优化算法的ADRC系统结构如图5所示。
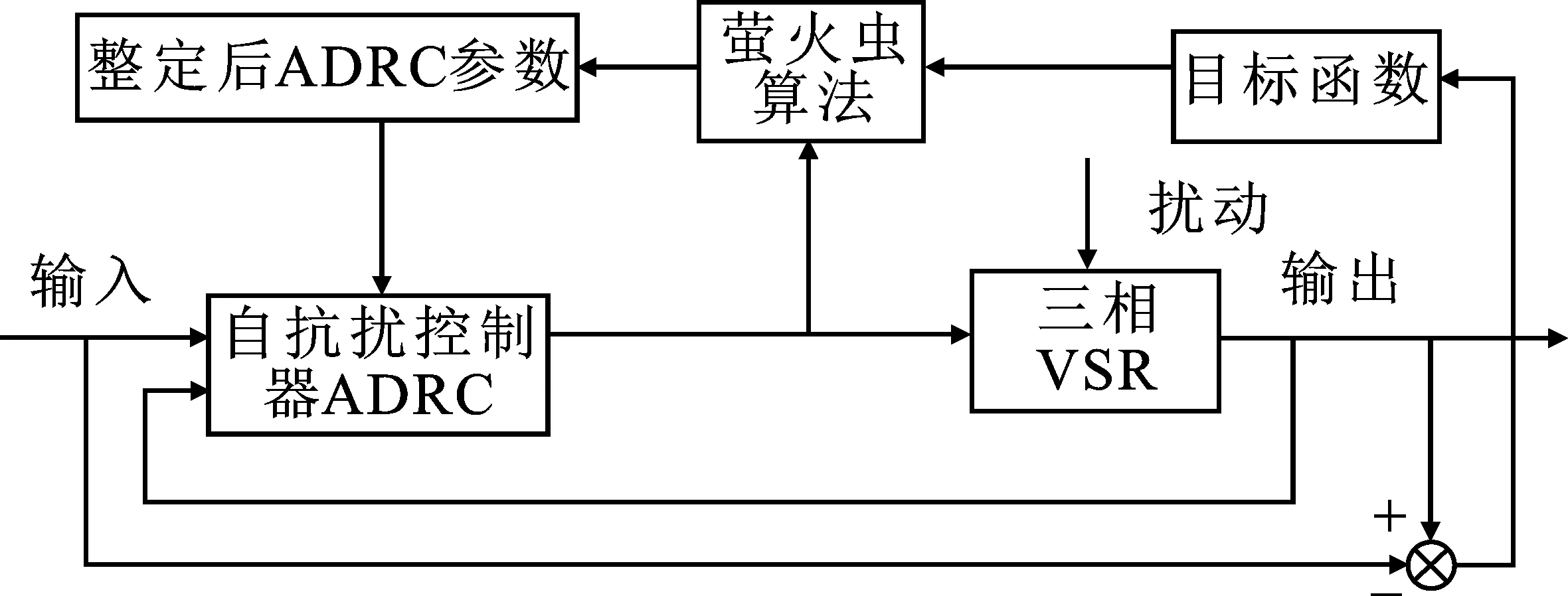
图5 基于萤火虫算法的ADRC系统结构图Figure 5. ADRC system structure diagram based on FA
3.3 抑制交流测负序电流的拓扑结构
在三相VSR状态方程中,正负序d轴分量和q轴分量是相互耦合的,不能独立控制。传统控制方法将会导致直流侧输出电压不稳定,还会影响网侧电流的品质,进而污染电网。基于萤火虫算法的自抗扰控制器对正负序电流进行分别控制,不仅能够快速准确地估计出整流器内部的耦合扰动,还能及时对其主动补偿。该控制策略的控制精度较高,有较强的抗扰动能力,不仅能有效地减少系统内外干扰所带来的影响,还可以防止三相VSR控制系统性能恶化[19-20]。抑制交流侧负序电流的拓扑结构控制框图如图6所示。

图6 抑制交流侧负序电流的拓扑结构控制框图Figure 6. Control block diagram of topology structure to suppress negative sequence current on AC side
4 仿真分析
为验证基于萤火虫优化算法的自抗扰控制策略的控制效果,本文利用Simulink搭建三相VSR模型,并对该控制方法进行研究分析。模型的参数设置如下:整流器交流侧电感为5 mH,直流侧电容为4 700 μF;母线电压给定值为700 V,负载为50 Ω;网侧的相间电压有效值设置为220 V,仿真设置电网不平衡度为20%,频率为50 Hz,自抗扰控制器参数设置为r=10,h0=0.15,b0=1。萤火虫算法参数如下:萤火虫种群数目设为50,维数为20,步长初值为0.02,吸引度初值为0.5。为了使参数趋于最优值,将FA算法的最大迭代更新次数设为50次,电流仿真波形如图7所示。

(a)

(b)
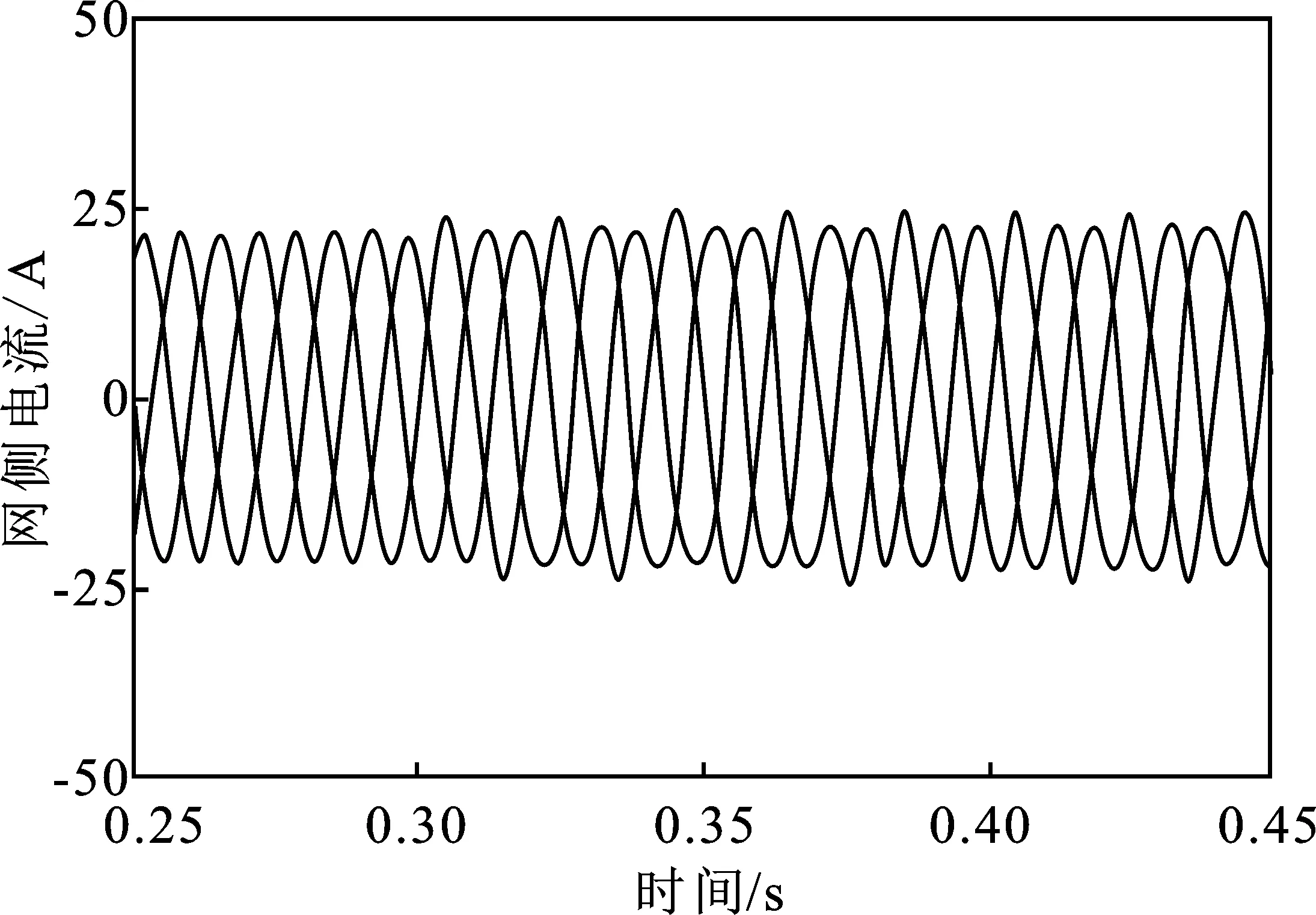
(c)图7 网压不平衡时仿真波形(a)三相输入电压不平衡 (b)传统调参网侧电流 (c)FA调参网侧电流Figure 7. Simulated waveforms when the grid voltage is unbalanced(a)Unbalanced three-phase input voltage (b)Grid-side current of traditional parameter adjustment method (c)Grid-side current of parameters adjusted by FA
在0.3 s时,电网的A相电压出现了幅值不平衡。对比图7(b)和图7(c)输出电流波形图可以看出,当网压不平衡时,由于采取了双电流环分别控制的方法,在自抗扰控制器控制的作用下,两种控制方法都能将整流器的网侧电流维持在良好的正弦状态。传统人工调参依靠经验进行整定,网侧电流总谐波畸变率为6.32%。采用FA进行调参,网侧电流总谐波畸变率仅为2.65%,说明优化后的策略在不平衡网压下能够有效减小整流器网侧的电流谐波。
为了验证三相VSR抗负载扰动的能力,在0.6 s的时候,在直流侧并入50 Ω的负载。图8(a)和图8(b)是两种控制方法下直流侧电压的变化情况。

(a)

(b)图8 负载扰动时仿真波形(a)传统调参直流母线电压 (b)FA调参直流母线电压Figure 8. Simulation waveform during load disturbance(a)DC bus voltage of traditional parameter adjustment method (b)DC bus voltage of parameters adjusted by FA
在图8中,传统调参直流母线电压跌落到684 V,经过0.32 s后电压重新稳定在700 V。采用萤火虫算法进行调参后直流母线电压跌落到688 V,经过0.21 s后电压恢复到参考值。采用两种方法都能够达到稳态值,但采用萤火虫算法调参控制时,直流母线电压动态跌落情况相比人工调参有所改善,动态调节时间更短。该结果说明利用萤火虫算法优化后的三相VSR的稳态和动态性均有较明显的改善,其可有效提高负载扰动的控制性能。
5 结束语
本文在三相VSR闭环系统的基础上加入了自抗扰控制器,估计并主动补偿和抑制系统内外干扰。由于自抗扰控制器具有多个耦合参数且依靠传统的经验整定法难以对其参数进行整定,因此本文利用萤火虫算法对二阶ADRC控制器中的关键参数进行寻优调整,使其能够快速且高效地完成对ESO和NLSEF中的β01、β02、β03、β1和β2参数的整定。与传统控制方法相比,本文所提控制策略使得三相VSR在电网电压不平衡以及负载突变时能够有效减少网侧电流谐波,且具有较好的抗负载扰动能力,有效改善了三相VSR的控制性能。
