智能型缆机运输管理研究
2022-02-25许珍
许珍
(中国水利水电第四工程局有限公司,青海 西宁 810007)
0 引言
白鹤滩水电站位于四川宁南县和云南巧家县,地处崇山峻岭深处、金沙江峡谷中,地势陡峭、交通不便,常规交通运输设备在峡谷内运输成本极高,材料、物资设备运输主要采用7 台平移式缆机运输。缆机群作为大坝810 万m3混凝土、12.6 万t 金属结构及材料吊装的主要运输设备,缆机群的运输效率对大坝的施工进度有着直接影响。作为世界上最大的缆机群,在恶劣气候条件下持续安全运输是工程建设的重要运输保障。
1 缆机群安全运输管理
白鹤滩水电站工程的7 台缆机均为大吨位、高塔架、平移式缆机,具有数量多、跨距大、扬程高、运输速度快、相互干扰大、大风天气环境下持续运输时间长的特点。特别是缆机群要在有限空间内多台高低层交叉作业、联合运输,对安全运输有很高的要求。因此确保缆机群高效、安全运输是重中之重。
1.1 缆机群运输风力测控
该缆机运输区域年均出现7 级以上大风天气239d,占年度总时长的65.5%。在大风天气条件下,缆机群高效、安全运输是整个工程运输的重点,因此风力测控是缆机群运输过程中的重要环节。
测控方法:在1 台缆机主塔、机房、小车、吊罐、副塔架分别设置1 台风速仪,在吊罐、吊钩、司机室、小车上安装高精度GPS 接收器,在吊罐和吊钩上安装高精度角度传感器。系统实时采集GPS、角度传感器和风速仪的信号,经过处理后通过无线以太网传送到司机室控制中心。司机室控制中心把采集到的各个位置的风速仪数据和吊钩的GPS 数据解析后,计算出对应的风速和吊钩的摆距,记录在上位机上,以便后期分析并做出决策。GPS 系统控制图如图1所示。
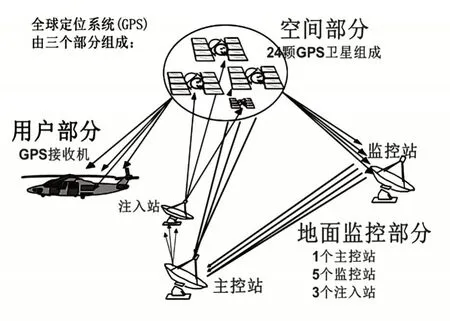
图1 GPS 系统控制图
1.2 缆机群协作运输原则
根据现场建筑及设备分布情况,缆机群协作运输是提升运输效率的关键。采用“双层双平+高低两线混凝土生产系统+双层供料平台”缆机群布置方案,解决了缆机群占位、高效调配、主索跨距过大的难题。通过反复分解动作、对比分析,从混凝土运输进仓、卸料、返回3 个环节共12 个分解动作制定“缆机协作”标准化用时,充分解决了缆机以水平运输、垂直运输为主的问题,缩短了运输时间,提高了运输效率。通过风速仪,对采集的数据进行分析,计算出对应的风速和吊钩的摆距,制定缆机群“高进低出”,相邻缆机“不同进同出”的方式,避免了协作运输过程中多台缆机发生碰撞的风险。
1.3 大风天气运输管理
通过分析不同风速对缆机群运输的影响,制定大风天气情况下缆机运输三级响应制度,规范在不同风速情况下运输原则、相邻缆机的间距控制标准,确保缆机群安全、高效运输。响应流程如图2所示。分析研究大风气象特征与缆机不同工况下的运维参数,揭示了特殊工况下缆机运输的规律,构建了缆机运输原则和应急响应机制,降低了安全风险,提高了运输效率。

图2 大风天气运输响应流程图
1.4 大雾天气运输管理
在大雾天气条件下,能见度较低,缆机群运输存在风险。因此,应遵循大雾天气下缆机群运输原则:缆机牵引、提升不允许联动操作。当可见度≥100m时,缆机牵引正常运输;50m≤可见度<100m 时,缆机牵引限速3 挡;30m≤可见度<50m 时,缆机牵引限速2挡;当可见度<30m 时,缆机停止运输。缆机架空完毕后,操作人员应将小车位置修正到初始位置,当接到指令后,应及时通知操作司机将小车走到指定位置。
1.5 雷雨天气运输管理
雷雨天气经常伴随大风出现,出现缆机过度晃动的情况,有可能造成人员伤亡的事件,应做好防雷防风措施并及时停止运输。在特殊情况下,采用高平台缆机网状分散,切断主电源形成避雷网,保护低平台缆机减速运输至安全位置后,停止运输。
1.6 缆机保养
缆机维护保养分为例行保养、定期保养、磨合保养三大类,具有保养点多、线长、面广等特点。定期维护保养包括日、周、月、年保养,需严格规定保养部位、保养周期,明确保养责任人,确保运输过程安全可靠。
2 缆机群联合运输管理
针对超大、超重构件运输,采用多台缆机联合运输。多台缆机联合运输涉及水平运输、垂直运输,安全风险高,对司机和指挥人员的专业水平和协作配合要求很高。
2.1 联合运输操作要点
两台缆机联合运输超大构件时,一台缆机先行走至平衡梁挂钩位置,另一台缆机在专人监护的情况下,司机按住旁路行走至安全并机距离。同平台两台缆机挂上平衡梁后,两台缆机司机设置在同一个通信联系频道,以自控状态指挥调平平衡梁、小车位置平行。确定两台缆机小车大钩挡位(基数,微数)一致后,选择主副机开始并机。主机先联动,隔2~3s 副机受控,主副司机显示灯正常后,尝试动作,看两台缆机动作是否一致,若一致则正常工作。联合运输完成后,副机先自控,然后主机再自控。
2.2 缆机群联合运输要求
在缆机群联合运输工况下,提升、牵引和大车行走速度均应小于原正常行走速度的50%,两台缆机小车的相对位置不能超过3m。低速提升至距离地面30cm 左右时,停机检查制动是否可靠,吊挂是否牢固,确保在安全环境下方可进行联合运输。联合运输完成后,及时检查主索的索头完好情况及小车、承码、其他各机构运行情况。
3 智能运输管理
为了实现在缆机群运输过程中障碍物自动识别避让、自动定位、实时监控、数据及时录入、统计等智能化功能,开展了缆机群运输智能化系统研究。
3.1 司机防疲劳系统
司机在高强度、长时间作业过程中,有时会出现精力不集中、打瞌睡的情况,是安全运输的大隐患。为了保证安全、平稳、高效运输,进行了司机防疲劳系统研究。司机防疲劳系统是利用摄像面部识别技术,采集司机面部特征进行识别和状态分析,结合语音提示功能,达到智能警示及设备保护的目的。在司机室正前方工控机台上安装疲劳识别摄像头,通过设定摄像、图片采集对比、预警提示,实现司机在疲劳状态时自动语音警示。系统连续提醒3 次,自动限定缆机牵引速度≤2 挡(1.5m/s),提升≤2 挡(0.6m/s),待确定司机复位后,恢复正常运输速度。增设操作人员防疲劳系统,通过采集操作人员的面部信息,判断人员的疲劳程度,发出语音提醒,降低了缆机人为因素安全风险。
3.2 防碰撞系统
缆机运输范围全部在峡谷中,场地狭窄、周边设备密集、运输环境复杂多变且运输跨度和高度都很大,因此设置防碰撞系统非常必要。
防碰撞系统包括:施工设备位置检测系统、信息交换系统、防碰撞系统服务器和人机交互系统四大部分。服务器是防碰撞系统的控制中心,可以与每一台缆机上的控制单元通信,收集缆机的位置和状态数据。服务器采集各缆机的位置和状态数据并建立三维模型,对控制范围内所有缆机进行信息处理,判断是否会发生碰撞,然后把结果反馈到每台缆机,从而实现缆机群安全运输。防碰撞系统通信原理如图3所示。
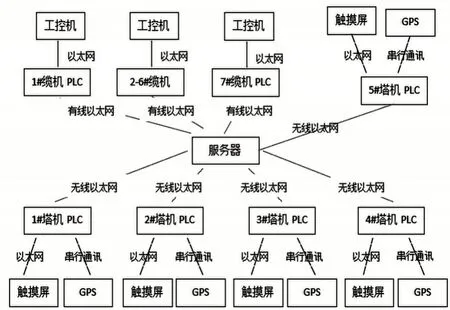
图3 防碰撞系统通信原理示意图
3.3 运输目标位置设定系统
为保证缆机群安全、高效运输,防止司机误操作、提高缆机群运输效率,在缆机司机室人机界面工控机操作系统中,设置运输目标位置设定系统。当缆机运输时,提前设置提升、牵引目标的位置数据。设定完成后,将缆机限定在设定数据范围内,超出范围将强制保护,有效防范误操作造成的安全事故。运输目标位置设定系统如图4所示。

图4 运输目标位置设定系统
3.4 智能监控系统
通过对缆机群运输系统数据自动采集分析,生成运输报表,实时监测、分析运输状态、运输效率情况。将缆机群运输的各点数据上传至系统共享,精准分析并智能预警各个运输环节,整体提升材料、物资设备的运输效率。缆机运输效率过程分析主要包括生产运输环节识别、运输车缆机整点运量分析、各环节耗时分析,并通过运输过程预警预报机制进行消息报送。缆机单循环运输包括待料、装料、运输、卸料、回程环节。通过卫星定位、数据缓存、速度传感器、通信等组件,研制缆机监控设备对缆机位置、速度、受料、待料等信息进行采集,并以通信方式发送给服务器,同步感知缆机、运输车的编号与位置,采集设备状态及其耗时,解决缆机与水平运输车高效运输及环节识别问题。智能监控系统如图5所示。

图5 智能监控系统
3.5 运输强度
依托缆机自动化控制系统和智能监控系统,达到缆机障碍物识别、避让、运输过程监控、分析的目的,提高了缆机群运输管理水平,实现了科学高效调度。缆机单循环分解为4 个单元12 个分解动作进行分析,通过制定个性化运输方式,提高了运输强度和安全性。采用高进低出,相邻缆机不同进同出的方式,避免碰撞风险。混凝土运输效率由平均45m3/h 逐步提高到108m3/h,创造了缆机群月运输强度27.3 万m3、年运输强度270 万m3的记录,运输效率显著提高。
4 结语
通过缆机群可视化调度、智能化控制,采用调度规划、目标识别、运输过程监控和效率分析等智能化运输功能,实现了缆机群多工况安全高效运输。利用成套新方法,对各环节运输效率、行为和轨迹进行数据分析和控制,实现了混凝土生产与运输过程各环节的自动化、可视化、精准化控制。可为类似作业环境下,水平、垂直运输提供借鉴。
