基于RPY的电缆沟智能巡检机器人运动学和动力学分析
2022-02-23颜爱平肖慧慧
颜爱平 肖慧慧





摘要:电缆沟环境复杂,人工巡检存在安全隐患,目前主要采用履带式智能巡检机器人进行巡检。本文运用RPY建立相对坐标系,主要分析机器人的运动学和动力学。通过对智能巡检机器人运动学和动力学的分析,不仅为跟踪智能巡检机器人的运动轨迹控制设计奠定了基础,机器人巡检所获得的数据还能为电力调控提供科学依据。
关键词:电缆沟;巡检机器人;相对坐标;运动学;动力学
电缆沟是布置在地面下的管道,主要用来敷设、更换电力与电讯电缆设施。由于电缆沟环境复杂,内设有支架,检修空间较小,检修人员存在作业风险,目前主要采用履带式智能巡检机器人进行巡检。机器人巡检时需要考虑:第一,安装在机器人车体上的传感器只能获取在其坐标系范围内的信息;第二,履带式智能巡检机器人在行驶时履带受力不均匀,且机器人在前行或转弯时很容易产生滑动。基于这两个问题,本文从智能巡检机器人RPY坐标系的建立、运动学方程建模、动力学建模三个方面进行了分析。
一、RPY坐标系的建立
由于安装在车体上的传感器只能获取在车体坐标系范围内的信息,因此,在运动学建模前要对坐标系进行转换。
如图1所示,将机器人结构简化,根据RPY变换方法建立坐标系[1]。OXYZ为大地坐标系,表示机器人整体所在的位置信息;O1X1Y1Z1为车体坐标系,固定在车体上,表示机器人系统的局部位置信息,车体坐标系随车体移动。
假设初始状态时,车体坐标系O1X1Y1Z1与大地坐标系OXYZ重合,当机器人沿X1轴方向前进时,车体绕X1轴旋转角度为;绕Y1轴旋转角度为;绕Z1轴旋转角度为,也称为偏航角,绕OX1轴逆时针方向为正。则机器人车体分别绕X1轴、Y1轴、Z1轴旋转后,相对于大地坐标系的旋转矩阵式如式(1)所示[2]:
在图1的二维平面XOY中,车体坐标系相对大地坐标系绕Z轴旋转了,规定逆时针方向为正。则车体坐标系到大地坐标系的转换矩阵为:
二、巡检机器人运动学方程建模
由于履带式机器人移动时,履带与地面有滑动摩擦,考虑摩擦因素影响,基于动力学平衡方程建立与实际情况相符合的滑动模型[3]。因此在建立运动学模型前,要作如下假设: ①把机器人的履带与车体看作刚体; ②机器人低速运动,且履带均匀接地;③机器人的质心位于车体的中心位置。
当机器人在XOY水平面运动时,从整体上看,可视为是围绕瞬时中心(Oc)做圆周运动,如图2所示。
由于机器人质心的运动由平移速度与旋转角速度组成,当车体产生滑动,相对于轴有偏移量d。在坐标上的投影分别为vx1、vy1,在上的投影为;表示点与原点的直线与机器人坐标系轴的夹角;表示到的旋转半径;表示到的旋转半径。
根据运动学分析,以两侧的履带主驱动轮的转速、作为输入,用机器人的车体坐标系运动学方程乘式(2)的转换矩阵,得机器人的车体相对于大地坐标系的运动学模型方程为:
三、巡檢机器人动力学方程建模
履带式智能巡检机器人运动过程中受力较复杂,为分析智能巡检机器人的受力情况,规定以下假设条件:
(1)机器人整机重量均匀分布在两侧的履带上,其对地压力均匀分布在履带中心线的两侧;
(2)不考虑地面不平整与沉陷引起的履带与地面间的相互作用;
(3)巡检机器人车体的质心与重心重合。
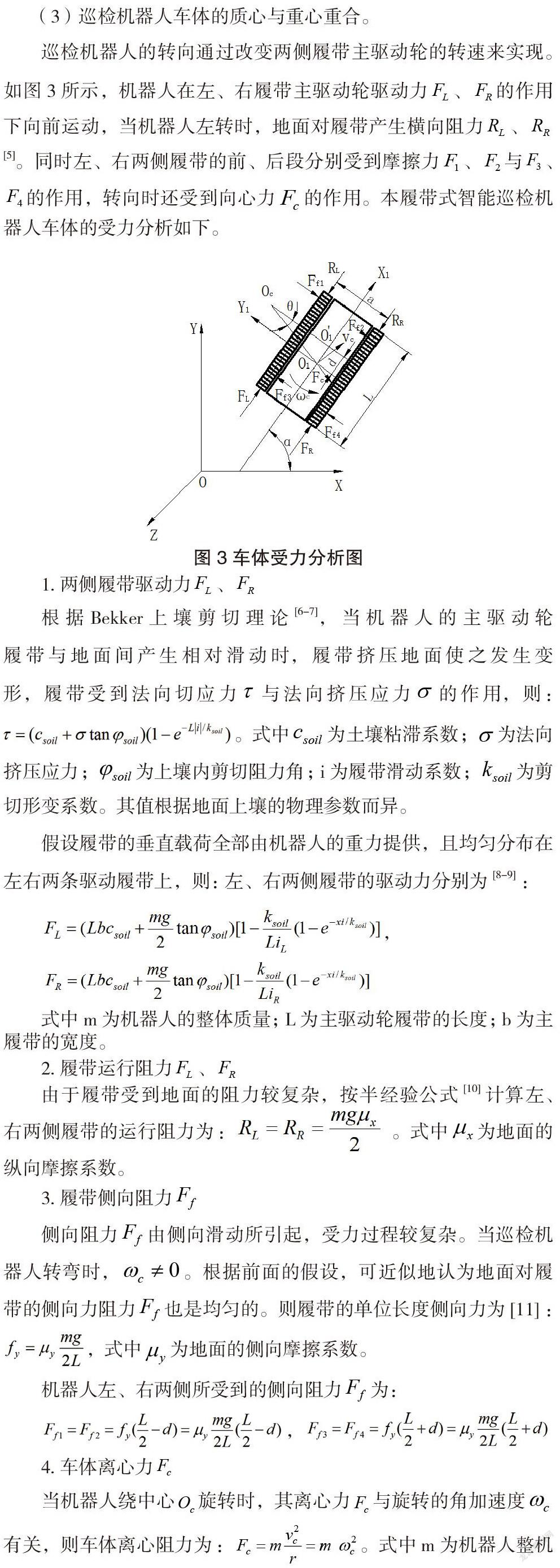
巡检机器人的转向通过改变两侧履带主驱动轮的转速来实现。如图3所示,机器人在左、右履带主驱动轮驱动力、的作用下向前运动,当机器人左转时,地面对履带产生横向阻力、[5]。同时左、右两侧履带的前、后段分别受到摩擦力、与、的作用,转向时还受到向心力的作用。本履带式智能巡检机器人车体的受力分析如下。
1.两侧履带驱动力、
根据Bekker上壤剪切理论[6-7],当机器人的主驱动轮履带与地面间产生相对滑动时,履带挤压地面使之发生变形,履带受到法向切应力与法向挤压应力的作用,则:式中为土壤粘滞系数;为法向挤压应力;为上壤内剪切阻力角;i为履带滑动系数;为剪切形变系数。其值根据地面上壤的物理参数而异。
式中m为机器人的整体质量;L为主驱动轮履带的长度;b为主履带的宽度。
2.履带运行阻力、
由于履带受到地面的阻力较复杂,按半经验公式[10]计算左、右两侧履带的运行阻力为: 。式中为地面的纵向摩擦系数。
3.履带侧向阻力
侧向阻力由侧向滑动所引起,受力过程较复杂。当巡检机器人转弯时,。根据前面的假设,可近似地认为地面对履带的侧向力阻力也是均匀的。则履带的单位长度侧向力为[11]:,式中为地面的侧向摩擦系数。
机器人左、右两侧所受到的侧向阻力为:
4.车体离心力
当机器人绕中心旋转时,其离心力与旋转的角加速度有关,则车体离心阻力为:。式中m为机器人整机质量;r为到的旋转半径;为车体绕的旋转角速度。
5.建立动力学模型
假设左、右两驱动轮的滑动系数相等,即。通过以上分析,建立智能巡检机器人全局坐标系的动力学方程为:
四、小结
本文在建立的RPY坐标系下,考虑智能巡检机器人的滑移运动,分别建立了智能巡检机器人运动学模型、动力学模型。动力学模型充分考虑了履带与地面间的作用力,使得建立的动力学模型更加准确可靠,从而为控制系统跟踪智能巡检机器人在电缆沟中的运动轨迹奠定了基础。
参考文献:
[1]中国工程建设标准化协会建筑施工专业委员会.工程建设常用专业词汇手册[M].中国建筑工业出版社,2006.
[2]胡晗,程建明,牛志刚.基于RPY的煤矿井下探测机器人越障分析[J].煤矿机械, 2013,34(011):109-111.
[3]商德勇.薄煤层综采工作面巡检机器人运动分析及试验研究[D].中国矿业大学(北京).
[4]王伟东.面向复杂地面环境的作业型履带式移动机器人研究 [D].哈尔滨:哈尔滨工业大学,2009.
[5]周波.地面移动机器人自主环境建模与适应控制方法研究[D].沈阳:中国科学院沈陽自动化研究所,2008.
[6]Le A T, Rye D C, Hugh F, etc.Estimation of track-soi1 interactions for autonomous tracked vehicles[C].International Conference on Robotics and Automation,New Mexico,1997:1388-1393.
[7]Shiller Z,Serate W,Hua M.Trajectory planning of tracked vehicles[C].Proceedings of IEEE International Conference on Robotics and Automation.Atlanta,GA:IEEE Press,l993:796-801.
[8]H.Shibly,K.Iagnemma,S.Dubowsky.An equivalent soil mechanics formulation for rigid wheels in deformable terrain,with application to planetary exploration rovers[J].Journal of Terramechanics,2005,(42):1-13.
[9]Bekker M G.Introduction to terrain-vehicle systems[M].University of Michigan Press,Ann habor,1969.
[10]庄继德.计算汽车地面力学[M].北京:机械工业出版社, 2002.
[11]周波,戴先中,韩建达.野外移动机器人滑动效应的在线建模和跟踪控制[J].机器人,2011,33(5):265-275.
基金项目:
1.湖南省自然科学科教联合项目(2020JJ7005)
2.复杂环境特种机器人控制技术与装备湖南省工程研究中心专项(Lgy18gz004)