步态分析及在功能性电刺激系统中的应用
2022-02-22陈子晗黄思远黄嘉俊李玉榕
陈子晗,黄思远,黄嘉俊,李玉榕,2
(1.福州大学 电气工程与自动化学院,福建 福州 350108;2.福州大学 福建省医疗器械和医药技术重点实验室,福建 福州 350108)
0 引 言
功能性电刺激(Functional Electrical Stimulation,FES)技术是利用低频电脉冲刺激患有功能障碍的肌肉,使肌肉完成特定动作,从而获得功能恢复的技术手段。其基本神经生理学原理是利用向神经施加低频脉冲电流,在完整的外周神经元中产生动作电位,模拟大脑的运动控制,诱发非自主肌肉收缩,进而形成运动。该技术已应用在中风后运动恢复、辅助脑性麻痹儿童改善上肢功能、改善不完全脊髓损伤患者行走期间的步态和基于FES的神经假肢助力截瘫个体恢复运动功能等康复领域。国内外越来越多的研究人员开始致力于研究FES技术。
针对目前国内的研究现状,本文详细介绍了根据角速度分析判断不同步态以此实现启停控制的模式。该算法通过前2个步态周期信息更新检测脚尖离地时刻的阈值,实现实时检测脚尖离地(Toe Off,TO)和脚跟着地(Heel Strike,HS)2个步态事件。在脚尖离地时对患者患肢胫骨前肌施加电刺激,输出基于阈值和耐受值的梯形波,在脚跟着地时停止电刺激,以此来诱发肌肉收缩,进而形成运动,协助患者进行康复训练。
1 步态特性分析
1.1 步态周期
实现启停控制算法要对步态周期有准确的判断,人的步行过程具有一定规律性和周期性,一个完整的步态可以分为3个阶段:站立相、摆动相和推动相。在步行过程中,当一侧脚从站立相开始,经过推动相、摆动相过程,再次回到站立相称为一个完整步态,如图1所示。脚跟离地(Heel Off,HO)标志着站立相的结束和推动相开始,脚尖离地(Toe Off,TO)标志着推动相的结束和摆动相的开始,脚跟着地(Heel Strike,HS)标志着摆动相的结束和进入站立相。
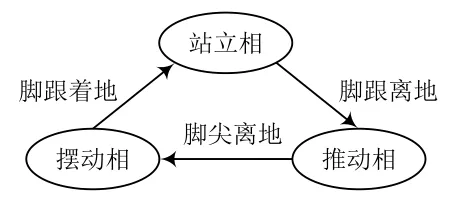
图1 步态事件循环过程
1.2 角速度分析
观察正常人在步态周期内矢状面角速度变化曲线(将人体分为左/右切面,左/右切面被称为矢状面,左/右切面的角速度称为矢状面角速度),结合步态过程分析不同阶段关键时刻的特征:
(1)脚跟离地时刻:当脚跟离地时,表示站立相结束。站立相进入推动相的过程中,陀螺仪采集的角速度数据随着脚跟和地面的角度增大而减小。
(2)脚尖离地时刻:当陀螺仪采集的角速度数据波形接近波谷时,表示脚尖即将离地。
(3)摆动阶段中点:当脚尖离地后的运动过程称为摆动相,此时角速度开始由负向正转变,在此过程中产生的极大值点被称为摆动相中点。
(4)脚跟着地时刻:摆动相中点之后,角速度数据开始变小,当出现第一个波谷时,表示脚跟着地。最后,当角速度为接近0的负值时,表示恢复到站立相,完成一个步态周期。
步态周期矢状面角速度变化曲线如图2所示。

图2 步态周期矢状面角速度变化曲线
2 启停控制模式设计
基于对步态过程的特征分析,本节设计了足下垂FES启停控制系统,将检测的脚尖离地和脚跟着地时刻作为开启和停止电刺激的时刻,以实现功能性电刺激的启停控制。
2.1 基于自适应阈值的启停控制算法
为实现功能性电刺激仪的启停控制,本文设计了基于自适应阈值的控制算法来控制功能性电刺激输出的开启和停止。首先,我们采集患者的角速度,使用MATLAB对数据进行滤波、拟合处理,得到患者的识别结果。然后根据出现负峰值后前后峰值幅值是否超过10%来判断此时步态处于脚尖离地状态还是脚跟着地状态。若负峰值后前后峰值幅值超过10%,则判断当前为脚尖离地状态,反之则是脚跟离地状态。通过判断脚尖离地以及脚跟着地2个时刻来确定电刺激的开启、停止时刻。确定脚尖抬起和脚跟着地时刻的流程如图3所示。

图3 确定脚尖离地和脚跟着地时刻的流程
上文提出,当前时刻之前的几个步态周期之间的关系可以为判断脚尖离地或脚跟着地提供参考。本文提出对前2个步态周期中脚尖离地的负峰值求平均值,再与一个系数相乘作为检查脚尖离地阈值的更新公式,如公式(1):

式中:TO表示阈值;TO和TO是前2个步态周期脚尖离地过程中的负峰值;a为比例系数,a的取值对脚尖离地时刻的识别产生影响。a的取值过小,会使得电刺激提前;取值过大,则无法正确判断脚尖离地的时刻。因此有必要对a的取值进行分析,寻找最佳阈值。
经病患主治医生的允许并征得患者本人同意的情况下,本实验招募了1名福建医科大学附属第一医院足下垂患者进行实验,采用控制变量法,保持其他实验条件不变的前提下,通过对参数a进行不同取值,对比分析识别结果后,发现a取0.6时检测结果最准确,如图4所示(“☆”和“*”分别代表算法识别出的脚尖离地和脚跟离地时刻,即对应电刺激仪开启和关闭时刻)。

图4 参数a取0.6时患者的识别结果
基于自适应阈值的启停控制算法的基本思想是实时识别步态过程中的脚尖离地(TO)和脚跟着地(HS)时刻来控制功能性电刺激仪的开启和停止。从算法本身考虑:(1)在检测TO时,通过阈值限制检测脚尖离地的时刻,当角速度处于小于阈值之后的第一个波谷时,判断为脚尖离地。从功能性电刺激仪的实际使用角度考虑,存在数据抖动,第一个波谷可能并非角速度最小的波谷,所以不能在患者脚尖已离地之后输出电刺激,存在患者脚尖拖地一段时间的可能性,可能发生跌倒;提前几十毫秒开启输出电刺激,从人体感觉而言,虽然差别不大,但是能使胫骨前肌准备收缩,避免出现脚尖拖地,从角速度方面考虑,小于阈值后的第一个波谷已接近负峰值,此时已处于脚尖离地过程中的某一个位置,所以可以在此刻输出电刺激。(2)在检测HS时,算法存在最大延时时间为8个数据点,具体延时时间取决于采样频率,传感器采样频率为100 Hz,所以存在最大延时时间为80 ms,由于脚跟已经着地,在此刻停止电刺激不存在跌倒风险。
2.2 软件设计
基于上小节所述,通过定时器的中断服务程序执行启停控制算法,实时检测脚尖离地时刻和脚跟着地时刻,并在这2个时刻使能另一个定时器,用于控制刺激的输出与否。定时器工作流程如图5所示。在脚跟着地时刻将标志位HS置1,关闭定时器,代表关闭刺激输出。脚尖离地时刻开启定时器,代表开启刺激输出。以此实现步态过程中的启停控制。
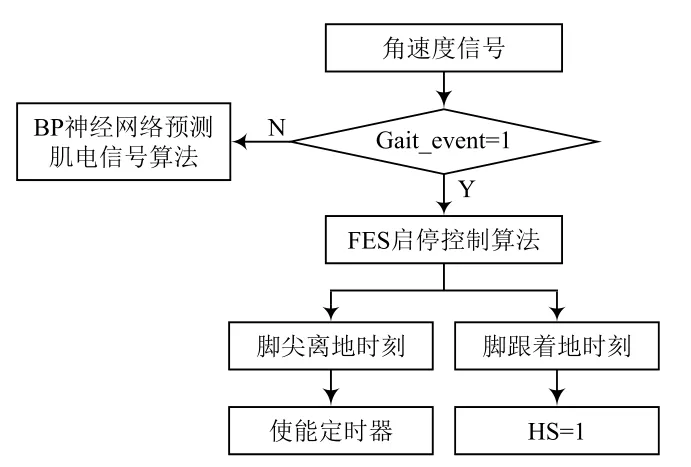
图5 启停控制模式下定时器的工作流程
本文设计的启停控制模式输出梯形波,结合胫骨前肌的阈值和耐受值,在脚尖离地时刺激强度从阈值线性增加至耐受值,然后电刺激强度维持在耐受值一段时间,在脚跟着地时再线性降至阈值。本次设计中,脉宽增加和减少过程中的刺激波形次序是对称的,因此,只需要计算增加或者脉宽减少过程其中一段高、低电平持续时间即可。图6所示为摆动过程中输出电刺激的脉宽变化示意图,其中,图6(a)为FES输出的刺激波形,采用双极性波形的正脉冲示意脉宽变化,图6(b)为对应的刺激包络线。

图6 电刺激脉宽变化示意图
2.3 硬件设计
足下垂FES系统硬件设计框图如图7所示。治疗仪由角速度采集模块以及脉冲输出模块构成。
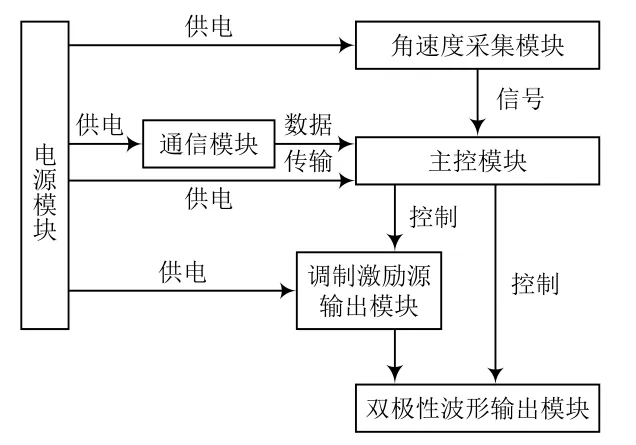
图7 足下垂FES系统硬件设计框图
2.3.1 角速度采集模块
本文选用MPU6050作为采集患者小腿角速度信号的传感器。MPU6050内部带有3个陀螺仪,每个陀螺仪监测围绕各轴转动的速度,当MPU6050围绕某一轴旋转时,该坐标轴的陀螺仪会产生科里奥利振动,经内部陀螺仪ADC采样后变为数字量。MPU6050电路如图8所示。

图8 MPU6050电路
MPU6050传感器通过IC接口与控制器进行数据传输,读取的角速度数据是数字量,并非真实的角速度,真实角速度=ADCrate/灵敏度,ADCrate表示ADC值。陀螺仪的灵敏度和前文提到的量程范围有关,量程由陀螺仪配置寄存器决定,具体配置见表1所列。从实际应用考虑,选择量程为±250°/s,灵敏度 =2n/量程,单位为LSB/(°/s)。
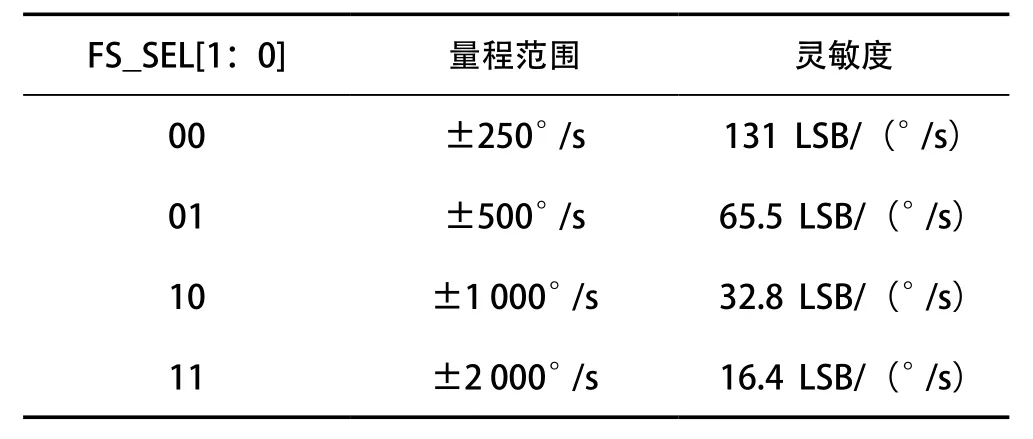
表1 MPU6050陀螺仪量程范围
2.3.2 脉冲输出模块
本文采用的双极性脉冲波形正负脉冲完全对称。双极性脉冲控制电路由4个开关管构成,由于其电路形似大写英文字母“H”,所以双极性波形控制电路又称为H桥电路,如图9所示。H桥电路通过微控制器PE13和PE14进行控制,当H桥正常工作时,控制Q、Q导通和Q、Q截止,产生正向刺激脉冲;Q、Q截止及Q、Q导通时,产生反向刺激脉冲,Q、Q和Q、Q轮流导通,且两组开关管导通时间一致,才能保证电刺激仪输出对称的双极性刺激脉冲。

图9 双极性波形输出电路
3 实验验证与分析
3.1 角速度数据采集试验
人行走过程中的活动规律主要体现在矢状面,足下垂患者与正常人的踝关节、小腿下部、小腿中部及小腿上部的角速度变化具有一致性,根据多次实验,认为小腿上部是佩戴功能性电刺激仪的最佳位置,即采集角速度信号的最佳位置。
实验过程中,患者佩戴电刺激仪采集角速度,如图10所示。

图10 一名足下垂患者在进行采集实验
通过MUP6050模块采集角速度后使用蓝牙串口与电脑通信,实现数据的传输,最后使用软件MATLAB画图,截取该患者任意一段时间内矢状面的角速度(后文均采用角速度表示),其波形如图11所示。图11呈现的是该患者在0.25 m/s、0.20 m/s和0.6 m/s速度下的波形。观察波形变化,发现足下垂患者在不同的行走速度下,每个步态周期采集的角速度数据量不同,但这并不会改变小腿角速度的变化规律,因此,在设计算法时可以不考虑行走速度这一因素。

图11 患者在0.25 m/s、0.20 m/s、0.60 m/s速度下的角速度
3.2 实验结果分析
截取该患者未受电刺激时一段时间内矢状面的角速度,同时,截取该患者受到电刺激后的角速度波形图,如图12、图13所示。观察波形,发现在刺激前后,本文设计的基于自适应阈值的启停控制算法都可以判断当前处于何种步态状态,其中“○”和“*”分别代表算法识别出的脚尖离地和脚跟离地时刻,即对应电刺激仪开启和关闭时刻。对比两幅波形图,可以发现患者在受到电刺激之后角速度波形发生改变,更加趋近正常状态。

图12 未受电刺激时患者角速度波形图

图13 受到电刺激后患者角速度波形图
据患者主治医生的描述,在启停控制模式下,其临床现象表现为:患者行走过程中能够产生踝关节的背屈,足尖能轻微上抬。患者主治医生根据上述临床现象认为:基于阈值的足下垂FES启停控制算法的功能性电刺激仪在一定程度上可以改善患者的步态。
4 结 语
本文提出一种基于自适应阈值的足下垂FES启停控制方法。采集足下垂患者下肢步态角速度信号,并对其进行特征分析,根据特征分析设计的自适应阈值启停控制算法可以在每个步态周期更新一次阈值,实时检测脚尖离地时刻和脚跟着地时刻,作为控制功能性电刺激仪开启和停止的信号。通过分析患者小腿角速度信号,完成了FES系统启停控制算法。刺激输出采用梯形包络,刺激强度在患肢摆动过程中线性增大和减小。设计并进行了系统验证实验,证实了该系统的可行性。所设计的启停控制模式可以辅助患者行走,在一定程度上改善步态。
本文仍然存在不足和需要改进的地方:在实时系统中,启停控制算法中的角速度均通过角速度传感器得到原始数据,可以尝试对其进行滤波,使波形平滑,以降低启停控制算法误判的概率。
