涵道式垂直起降固定翼无人机过渡走廊研究
2022-02-22王春阳周洲
王春阳,周洲
(西北工业大学航空学院,西安 710072)
0 引 言
垂直起降固定翼无人机能够实现零速度起飞着陆,不需要开辟专门的起降跑道,具有悬停能力,能够保持常规固定翼飞行器的速度快、航程长等优点,自身反扭矩相互抵消,机动灵活,是一些特殊环境下执行侦察、监测任务的最佳选择之一。无人机所用涵道在相同的叶片尺寸下比螺旋桨产生更大的推力,这也确保了其设计紧凑、低噪声和高气动效率的特点。这些特性使得各国机构在涵道式无人机领域进行了相关研究。
常规固定翼无人机要实现垂直起降,需要额外的增加动力部件,在众多的垂直起降固定翼飞行器中,尾座式、倾转旋翼式和固旋翼式是最为常见的设计。涵道式垂直起降固定翼无人机,其动力系统分两部分,一是前升力风扇系统,二是由后涵道、舵面组成的动力增升系统。此类飞行器能够从垂直起降过渡到水平飞行,中间的过渡走廊是飞行过程的重点。针对垂直起降固定翼飞行器的过渡飞行走廊研究,主要集中在复合直升机和倾转旋翼类飞行器。朱汉等、段赛玉等对复合式直升机的安全过渡走廊进行了研究,并给出了过渡走廊的计算方法;吴伟伟等针对倾转旋翼机过渡过程中构型不断变化,气动特性具有强非线性的特点,建立了一套适合于过渡状态的网格系统,得出了过渡状态的气动特性;NASA 以XV-15和V-22 为样机对倾转旋翼飞行器进行了研究,给出了过渡过程中的飞行操纵策略;J. Magee等、L. R. Wallace 等、S. W. Choi 等以 缩 比样机为研究对象,研究了短舱倾角与飞行速度包线,并与实验测试结果进行了比较,完成了从直升机模式到固定翼模式的过渡飞行;曹芸芸等针对倾转旋翼飞行器过渡飞行过程中的变构型变速度的特点,提出了一种此类飞行器从垂直起降到水平飞行的过渡飞行的动力系统倾角—速度包线分析方法,确定了机翼失速限制的发动机短舱倾角—速度包线;万华芳、陈永等针对倾转旋翼飞行器在飞行配平过程中姿态角的取值范围,以XV-15 飞行器为案例,计算确定了其过渡走廊,并且设计了过渡走廊曲线。
以上研究多针对倾转旋翼类飞行器和纯涵道类飞行器的过渡飞行走廊,而涵道和升力风扇为动力的垂直起降固定翼类无人机的过渡走廊尚未有太多研究,王红波等对预埋式升力风扇对全机的气动影响进行了研究,提出了一种耦合动力的双层翼布局垂直起降固定翼无人机,并验证此布局利用滑流增升的思路是可行的。
本文以涵道式垂直起降固定翼无人机为研究对象,基于无人机的动力和气动力平衡匹配,从飞行力学角度出发,建立垂直起降固定翼无人机的过渡飞行走廊模型,采用案例无人机对过渡走廊进行计算,并提出两种扩大过渡走廊的方法。
1 过渡走廊模型
垂直起降固定翼无人机的过渡飞行走廊与固定翼飞行器的飞行包线概念相似,本文研究的飞行过渡走廊模型即为此类无人机的动力增升系统偏角—速度包线模型。该模型分别从低速和高速两个方面进行分析,低速段即为飞行过渡走廊的左边界,由最大升力系数来确定;高速段为飞行过渡走廊右边界,由可用功率来确定。
在垂直起降模式下,垂直起降固定翼无人机动力配置和直升机有较大差别,主要由前升力风扇和后动力增升系统组成,如图1 所示。固定翼飞行模式下,前升力风扇关闭,动力增升系统转平,动力增升涵道为推进动力,机翼为升力面。过渡飞行过程中,动力增升系统不断偏转,升力风扇动力不断变化,在此过程中由动力增升系统、前升力风扇和机翼气动力三者来平衡无人机的重力,前进动力则主要由动力增升系统偏转产生的前向动力分量提供。当无人机处于低速飞行时,对动力增升系统进行较快的偏转可能会导致机翼失速,从而不能完成过渡飞行;当无人机飞行速度过高时,动力增升系统的偏转可能会导致可用功率和动力稳定性不足等问题。

图1 涵道式垂直起降固定翼无人机示意图Fig.1 Diagram of ducted vertical take-off and landing fixed-wing UAV
1.1 过渡窗口
飞行过渡窗口是指完成某种飞行任务所需要的外界条件和飞行器自身条件的参数合集。本文的过渡飞行窗口可以分为过渡前端窗口和过渡末端窗口,前端窗口和末端窗口之间的合力参数匹配即可组成过渡飞行走廊。过渡前端窗口是垂直起飞后悬停在某一安全高度的飞行状态;过渡末端窗口是满足安全平飞速度的飞行状态。过渡前端窗口通常满足一定的安全高度即可,过渡末端窗口通常有三个重要飞行参数,一是飞行速度,二是动力推力,三是无人机姿态,可以通过式(1)~式(3)计算得出。
式中:为无人机质量;为气动升力;为空气密度;为 无人机失速速度;为机翼 面积;C为无人机最大升力系数;为末端窗口的安全飞行速度;为全机力矩,其平衡方程如式(4)所示。

式中:为升力风扇推力;为增升涵道推力;为飞机俯仰角;为涵道合力偏角;为升力风扇力臂;为动力增升系统力臂。
1.2 基于最大升力系数的动力增升系统偏角—速度包线模型
低速段的动力增升系统偏角—速度包线从垂直起降飞行模式的悬停状态开始,直到动力增升系统偏转到固定翼飞行模式下无人机不发生失速的最小速度。悬停时动力增升系统气动力和前升力风扇气动力平衡无人机重力,在一般情况下,无人机姿态角为零,此时的升力风扇拉力和动力增升系统气动力竖直向上,由于增升翼面的存在,增升涵道的偏角一般小于90°。动力增升系统气动力偏角与增升涵道偏角和增升翼面相对偏角相关,可表示为

式中:为动力增升系统合力偏角;为增升涵道相对于机体偏角;为增升翼面相对于增升涵道偏角。
以悬停状态为过渡前端窗口开始转入过渡飞行模式,但在过渡飞行初期,速度积累不够,飞行速度较低,动力增升系统偏转过程中除了满足无人机的升力和拉力与重力和阻力平衡之外,还要保证动力增升系统不同偏转角下的机翼不失速。
过渡飞行过程中,无人机的受力情况如图2 所示,其中为机身迎角;和分别为机翼气动升力和阻力,分别包含了主翼自由来流部分气动力和主翼诱导部分气动力。

图2 过渡过程受力示意图Fig.2 Force diagram of transition process
根据无人机受力可分析其平衡关系如下:

式(6)中升力和阻力可表示为
式中:和分别为增升涵道在主翼上的诱导升力和诱导阻力。
垂直起降固定翼无人机在过渡飞行过程中,无人机的重力主要由升力风扇和动力增升系统来平衡,进而过渡到机翼气动力平衡。过渡前期飞行速度较低,机翼所能提供的升力限制于临界失速迎角,因此在计算过渡低速段包线时机翼升力所对应的最大迎角取临界迎角,过渡飞行包线低速段的最大迎角满足关系:

式中:为机翼临界迎角;为机翼安装角。
1.3 基于可用功率的动力增升系统偏角—速度包线模型
平衡状态的包线给出了以机翼不失速为前提的动力增升系统偏角—速度包线,但是在实际飞行过程中,只要动力足够,即便是机翼失速,都能较好地完成过渡飞行。假设无人机的结构性能足够好,不考虑结构问题所产生的颤振边界,将无人机系统可用功率作为约束来确定过渡过程的动力增升系统偏角—速度包线。
动力增升系统在偏转过程中必须满足升力风扇和动力增升系统气动力、机身气动力与无人机重力相平衡,就必须要求升力风扇和动力增升系统的可用功率在过渡飞行过程中满足飞行要求。
升力风扇和动力增升涵道的需用功率组成一致,都是由其诱导功率、型阻功率、废阻功率和爬升功率四部分组成,即有:

式中:为从发动机到叶片的传动损失系数。
根据能量守恒和动量定理,废阻功率、诱导功率和爬升功率可以表示为

式中:为叶片平面的垂直速度;为旋翼叶片的诱导速度。
考虑到升力风扇和增升涵道存在多桨叶片,诱导速度非均匀,本文对诱导速度加以修正,则式(10)表示为

根据叶素理论,旋翼类型阻功率表示为

=π C/8,为 旋 翼 实 度,C为 叶片阻力系数,为旋翼桨尖速度,为前进比。对于升力风扇和增升涵道类动力部件,其功率可以用式(10)~式(12)求得。
在功率限制的情况下,垂直起降固定翼无人机的动力增升系统偏角—速度包线边界在满足力平衡关系的同时,升力风扇和增升涵道总功率必须小于动力系统的额定功率,即<。
1.4 过渡走廊计算流程
过渡走廊即为过渡飞行包线,式(6)为计算垂直起降固定翼无人机过渡走廊的平衡方程,其与式(1)联立可求解三个未知量,包括升力风扇拉力、动力增升系统拉力、动力增升系统拉力偏角。在计算基于失速速度的动力增升系统偏角—速度包线时,以升力风扇拉力、动力增升系统拉力和动力增升系统拉力偏角为求解量;在计算基于功率的动力增升系统偏角—速度包线时,以升力风扇和增升涵道功率为限制,以无人机姿态为求解量。
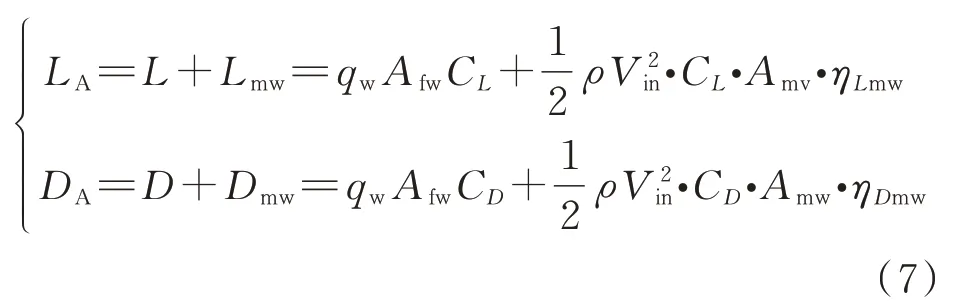
过渡走廊计算流程如图3 所示。首先由悬停状态公式(4)确定过渡飞行包线前端窗口的动力参数。根据机翼不失速条件公式(1)确定无人机此时状态的气动力系数,在不同的飞行速度下将C、C代入公式(7)求解出无人机机身气动力,最终代入平衡公式(6),以升力风扇拉力、动力增升系统拉力和动力增升系统拉力偏角为求解量,进行配平计算,可求得基于失速速度的动力增升系统偏角—速度包线。计算基于功率的动力增升系统偏角—速度包线时,首先设定动力增升系统偏角,对平衡方程进行计算,然后根据功率公式求出部件需用功率随前飞速度的变化值,最后根据动力部件输出功率限制条件得到垂直起降固定翼无人机基于功率的过渡飞行包线。
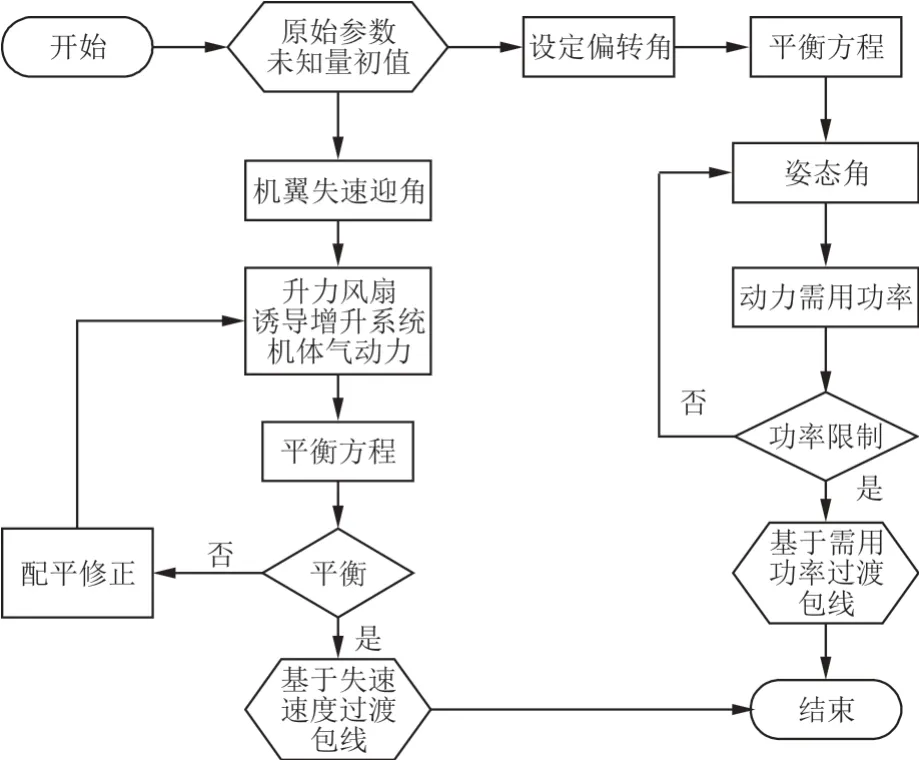
图3 过渡走廊计算流程Fig.3 Calculation process of transition corridor
2 算例与分析
以某型垂直起降固定翼无人机为案例样机,计算其过渡飞行过程中的动力增升系统偏角—速度包线。样机采用前升力风扇、后动力增升系统的布局,过渡飞行过程中的样机升力系数和阻力系数随迎角的变化关系如图4 所示,图例中“12-A0-5”表示动力增升系统单涵道动力12 N,迎角为0°,自由来流为5 m/s,图例中“12-F10-5”表示动力增升系统单涵道动力12 N,涵道后舵面偏转10°,自由来流为5 m/s,此气动力系数曲线计算了过渡过程中特殊状态点的气动数据。
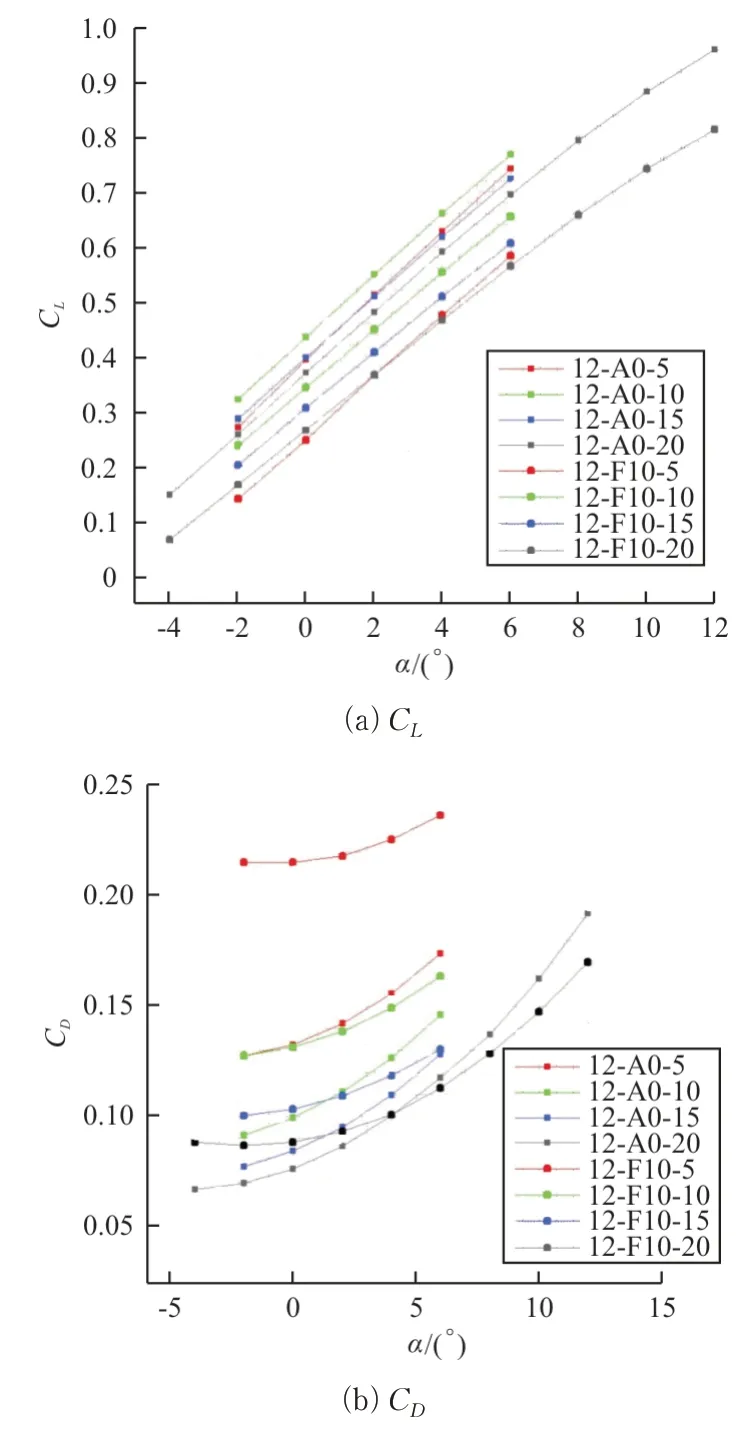
图4 案例无人机过渡过程升阻系数曲线Fig.4 Curves of CL and CD of case UAV in transition process
升力风扇和动力增升系统的额定功率和计算参数如表1 所示。
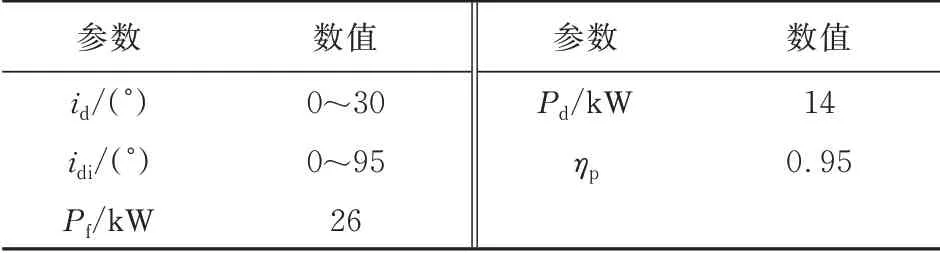
表1 计算参数和经验系数Table 1 Calculation parameters and experience coefficient
2.1 计算结果
计算的案例无人机基于失速迎角的动力增升系统偏角—速度包线如图5 所示,可以看出:悬停阶段,动力增升系统合力偏转角在75°左右,偏转到固定翼飞行模式时的最小飞行速度为43 m/s。
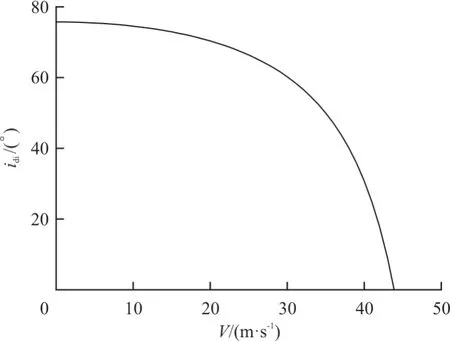
图5 基于失速迎角的过渡走廊左边界Fig.5 Left margin of transition corridor based on stall attack angle
过渡飞行包线内的升力风扇拉力、动力增升系统拉力、机体升力和阻力的变化曲线如图6 所示,可以看出:悬停时,无人机的重力由升力风扇和动力增升系统拉力来平衡,随着动力增升系统的偏转,无人机的升力由动力部件(升力风扇和动力增升系统)逐渐过渡到无人机机翼来提供,随着速度的增加,无人机的升力和阻力也随之增大。
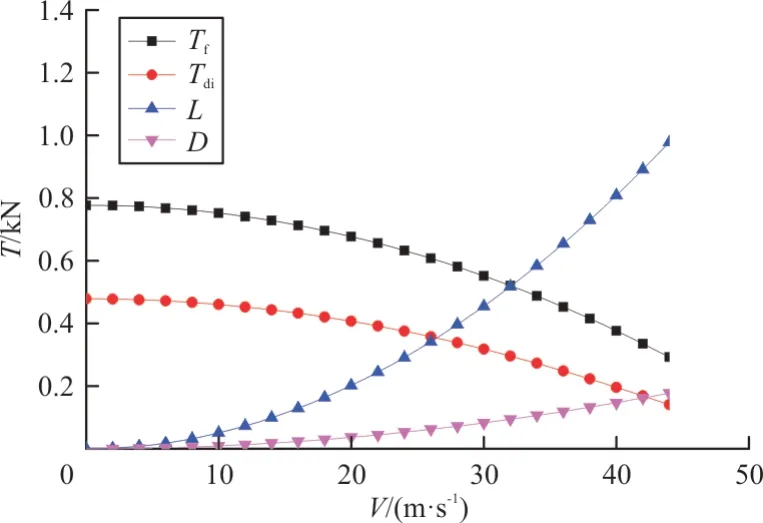
图6 基于失速迎角的过渡走廊左边界气动力变化Fig.6 Aerodynamicforce change of transition corridor left margin based on stall attack angle
在不同姿态角下,无人机动力部件的总功率在过渡过程中随飞行速度的变化曲线如图7 所示。在功率限制的条件下,根据需用功率和最大可用功率相等,可得到基于功率的垂直起降固定翼无人机动力增升系统偏角—速度包线。从图7 可以看出:在同一姿态角下随着速度的增加,需用功率是先变小后变大,这与增升涵道的入流特性密切相关;大姿态角下过渡功率要比小迎角功率大,大迎角过渡在低速时便会触发功率限制,因为姿态角越大,过渡过程中的阻力越大,所需的功率就越大。
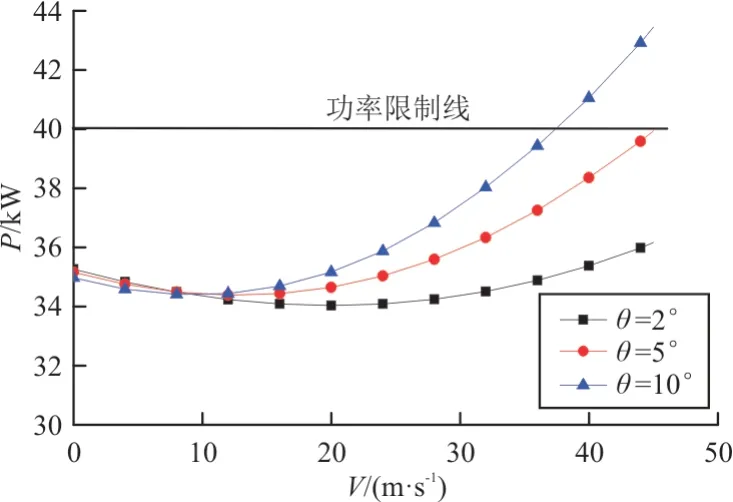
图7 不同姿态角的过渡功率Fig.7 Transition power of different attitude angles
基于功率计算的过渡走廊右边界如图8所示,与图5 不同的是在高速段,涵道合力偏角可以保持垂直,直到触发功率限制,诱导增升系统才开始偏转。
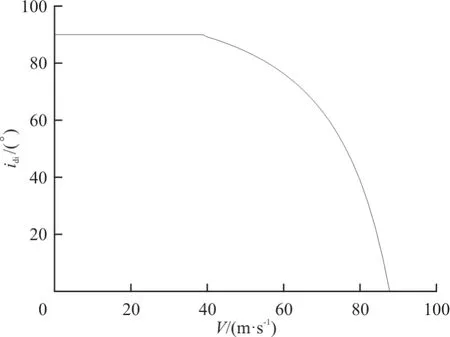
图8 基于功率的过渡走廊右边界Fig.8 Right margin of transition corridor based on power
将基于失速迎角计算的飞行包线与基于功率限制计算的飞行包线相结合,便可得出垂直起降固定翼无人机过渡飞行走廊,如图9 所示,可以看出:低速段的过渡走廊左边界是基于失速迎角的动力增升系统偏角—速度包线,高速段的右边界是基于功率的动力增升系统偏角—速度包线,在两个包线之间的过渡走廊中无人机可以完成过渡飞行。
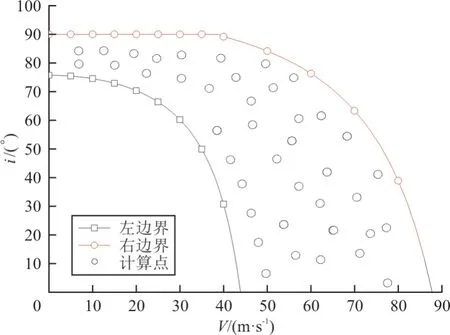
图9 垂直起降固定翼无人机过渡飞行走廊Fig.9 Transition flight corridor of VLOT fix-wing UAV
2.2 操纵参数影响分析
垂直起降固定翼无人机的过渡飞行过程是连接垂直起降过程和固定翼平飞过程的中间过程,是垂直起降固定翼无人机的一个重要飞行模式。在过渡飞行过程中,动力增升系统不断偏转,气动构型随之变化,气动力也随之变化,其过渡飞行也是一种危险的飞行模式。垂直起降固定翼无人机的动力增升系统偏角—速度包线越大,其过渡飞行过程越容易实现。在飞行包线内,无人机的飞行姿态以及动力偏转的快慢对过渡过程有一定影响,文中将从飞行姿态和增升涵道偏转速度两方面进行分析。
在过渡过程中,保证纵向平衡的前提下,不同的俯仰角过渡会有不同的过渡状态特性,如图10所示,可以看出:以大姿态角过渡飞行时,在较低的飞行速度下就能达到升阻平衡;而小姿态角过渡飞行时,需要较高的飞行速度才能达到升阻平衡,进一步完成飞行过渡。

图10 不同姿态的过渡速度Fig.10 Transition speed at different attitudes
在不同的涵道偏转角速率下,垂直起降固定翼无人机有不同的配平飞行能力。在动力系统允许的范围内,涵道偏转速度可以在1~14(°)/s 之间变化,如图11~图12 所示,当涵道偏转速率超过14(°)/s 时,就会超出升力风扇的配平能力,不能完成过渡飞行。仿真计算结果是在无人机稳定平衡状态下计算得出,在过渡时间为目标情况下,俯仰姿态角越小越好,动力增升系统偏转越快;以动力系统力学特性为目标,优化可得在3°俯仰姿态角下,5(°)/s 的涵道偏转角速度和1.5(°)/s 的增升翼面偏转角速度能够稳定地完成过渡。
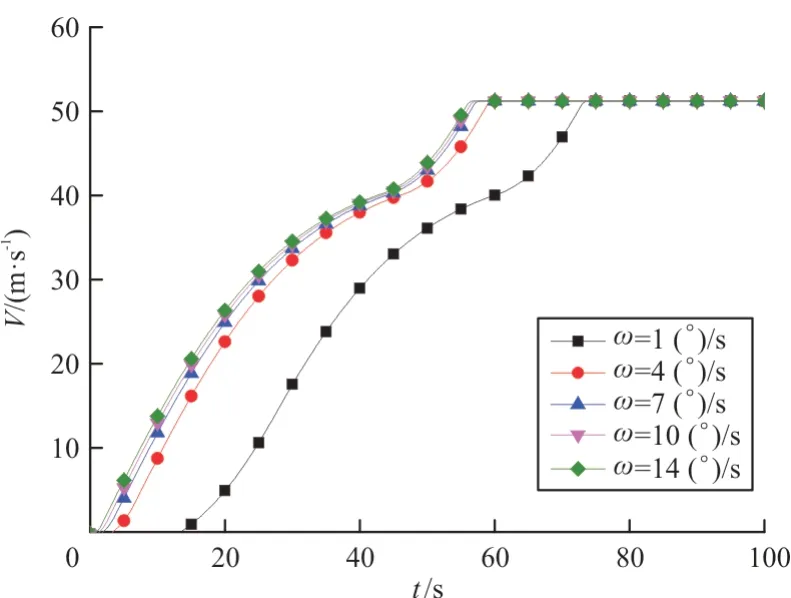
图11 不同涵道偏转速率的速度变化Fig.11 Speed change at different duct offset speed

图12 不同涵道偏转速率的动力变化Fig.12 Power change at different duct offset speed
2.3 扩大过渡走廊的方法
在飞行器设计过程中,垂直起降固定翼无人机的气动参数对飞行包线的影响是直接的,本文从气动参数方面对垂直起降固定翼无人机进行飞行包线分析,为垂直起降固定翼无人机过渡走廊设计提供方法。基于失速迎角的动力增升系统偏角—速度包线是由失速迎角下最大升力系数计算而得到的,而机翼的失速迎角主要受机翼面积、机翼升力系数、机翼安装角等气动参数的影响,因此基于失速迎角的动力增升系统偏角—速度包线将受到这些参数的影响,下面将分析这些参数对基于失速迎角的动力增升系统偏角—速度包线的影响。
机翼面积增加10%、20%、30%后基于失速迎角的动力增升系统偏角—速度包线变化图如图13 所示,失速迎角对应最大升力系数C增加10%、20%、30%后基于失速迎角的动力增升系统偏角—速度包线变化图如图14 所示,可以看出:改变机翼面积参数和最大失速升力系数可以改变基于失速迎角的动力增升系统偏角—速度包线的位置,以速度为标准,计算可得三种比例下过渡走廊分别扩大2.33%、4.66%、6.97%。增加机翼面积和增大最大失速升力系数都可以使飞行包线向悬停段移动,达到了扩大垂直起降固定翼无人机飞行走廊的目的。

图13 机翼面积对过渡走廊左边界影响Fig.13 Influence of wing area on left margin of transition corridor
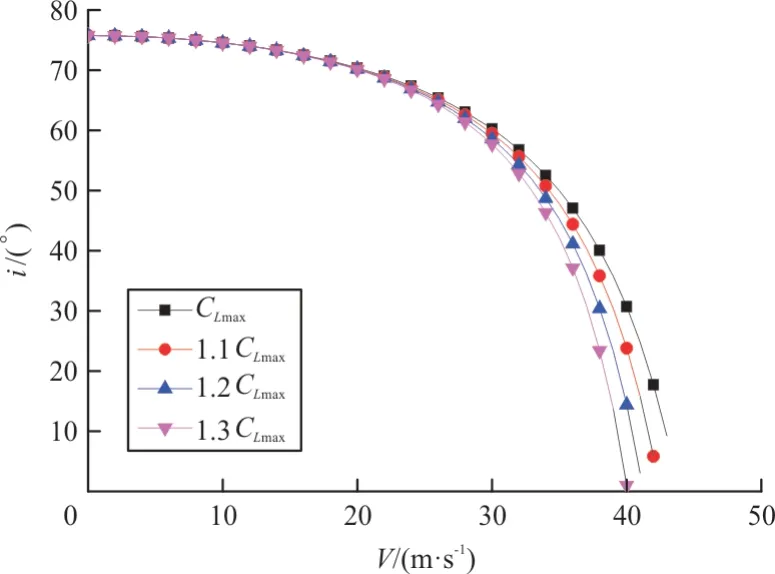
图14 升力系数对过渡走廊左边界影响Fig.14 Influence of lift coefficient on left margin of transition corridor
垂直起降固定翼无人机的右飞行走廊边界是由基于功率的动力增升系统偏角—速度包线所确定,因此降低飞行状态的需用功率或者增大飞行系统的可用功率,能够改变基于功率的动力增升系统偏角—速度包线。将可用功率提高10%、20%之后的基于功率的动力增升系统偏角—速度包线如图15 所示,可以看出:随着可用功率的增大,基于功率的动力增升系统偏角—速度包线向右移动,从而扩大了飞行走廊边界,以速度为标准,计算可得两种比例下过渡走廊分别扩大21.43%、41.67%。
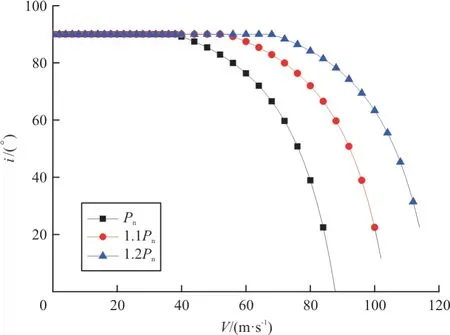
图15 可用功率对飞行包线的影响Fig.15 Influence of available power on flight envelope
综上所述,采用气动参数的改善来扩大飞行走廊的效果要差于同百分比下采用可用功率的改善来扩大飞行走廊,即用功率参数来扩大飞行走廊要比用气动参数来扩大飞行走廊效果更加显著。通过扩大此类垂直起降固定翼无人机过渡飞行走廊,有利提高其过渡飞行安全性。
3 结 论
(1)文中所建立的涵道式垂直起降固定翼无人机动力增升系统偏角—速度包线能够很好地描述此类垂直起降固定翼无人机的过渡飞行走廊。
(2)此类垂直起降固定翼无人机的过渡飞行走廊左边界是由过渡飞行时的最大升力系数确定,而右边界是由最大可用功率确定。
(3)在过渡飞行过程中,以小姿态角过渡完成时间最短,而大姿态角过渡动力偏转较慢,完成过程时间长。
(4)通过提高功率参数来扩大过渡走廊比提高气动参数扩大过渡走廊效果更加明显,可用功率提高10%可以使过渡走廊扩大21.43%,而机翼面积或者升力系数提高10%仅使过渡走廊扩大约2.33%。
