无人机巡检系统中毫米波波束赋形技术研究
2022-02-20张恺嘉杨瑞峰郭开阳
张恺嘉,杨瑞峰,郭开阳,侯 杰
(1.国网山西省电力公司繁峙县供电公司,山西 繁峙 034300;2.国网山西省电力公司忻州供电公司,山西 忻州 034099)
0 引言
近年来,我国无人机产业发展迅猛,凭借着结构简单轻便、远程实时操控、价格低廉易部署等特点,被广泛应用在农业、物流、测绘、应急、能源等领域。在电网领域,传统的人工巡检方式存在巡检范围受限、工作效率低、安全隐患等问题,随着智能电网技术中机巡业务的不断推进和发展,无人机巡检作业已被国家电网纳入输电、配电线路精益化考核指标。
无人机巡检系统中,为了实现故障的精准定位,无人机与地面控制中心之间需要高速率、大带宽的通信系统传输高清图像。5G超高带宽、超低时延、超大连接的技术优势,以及毫米波的丰富高频段带宽资源,可以大幅提升无人机视频实时传输、飞行状态监控、高精度定位和远程操控能力,助力实现5G网联环境下无人机电力配电线巡检。
但是,26 GHz频段的5G毫米波存在波长短、传播路径损耗大、穿透损耗大、衍射绕射困难、耗能高等特点,不利于远距离通信。随着波束成形技术的发展,无人机大规模的天线阵列产生具有高增益的窄波束,将其应用在5G毫米波系统中,大大提高了系统的频谱复用率和频谱效率,能满足高清视频数据的高速传输。无人机系统结构简单轻便的同时,其载荷能力和算法能力受限,所以本文对无人机毫米波基站系统的波束成形系统进行了研究。
1 无人机巡检系统波束赋形系统架构
1.1 无人机混合波束赋形系统模型
波束赋形的基本思想是利用波的干涉现象,通过天线传感器阵列接收到信号进行权值求和,从而产生具有特定指向的波束的一项技术。波束赋形技术将能量集中到某个波束,而不是向所有方向传播,最终实现阵列波束的指向控制、零陷控制、旁瓣对消和抗干扰的目的。大大提高了接收端的信噪比,提高系统性能。
在5G(NR)无线网络中,目前有3种波束赋形技术,分别是模拟波束赋形(Analog Beamforming)、数字波束赋形(Digital Beamforming)和混合波束赋形(Hybird Beamforming)。
模拟波束赋形(ABF)就是对模拟信号进行波束赋形,将幅度和相位权值作用于模拟信号,主要工作在DAC之后,ADC之前。该系统架构通过控制相移器来控制波束,模拟波束成形架构只需一组RF链与所有陈列天线连接,结构简单便于实现,成本小,功耗低。但只能生成、管理一个波束,即传输单个数据流信号,系统速率过低[1]。
在数字波束成形(DBF)系统中,要求天线阵列数与射频(RF)链数目相等,即每条RF链路都需要一套单独的 DAC/ADC、混频器、滤波器和功放器[2]。该系统架构可同时生成、管理多个波束,即可同时传输多个数据流,处理灵活、自由度高。当5G 阵列天线需要上百的阵列之后,就需要大量的RF链路射频设备,尺寸、成本和功耗的要求都很严峻。
无人机能量制约着续航能力,对于应用在无人机系统中的波束成形系统架构,必须使用低复杂度的波束成形技术,必须综合考虑系统性能和复杂度的平衡问题。由于天线的数量,数字信号处理硬件费用不算昂贵,但RF射频链模块及后续维护费用昂贵。而5G毫米波波束成形架构中,发射端布置了成千上万根天线,权衡系统性能和复杂度开销的角度,采用混合波束赋形系统架构,即一根RF射频链与所有阵列天线连接。混合波束成形系统架构如图1所示,该系统结合了数字波束赋形和模拟波束赋形系统的优点,采用大规模的多输入多输出MIMO系统,是5G通信系统的关键技术。
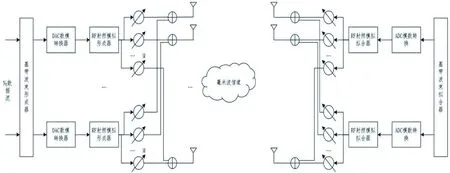
图1 混合波束成形系统架构

1.2 无人机毫米波信道模型
1.2.1 毫米波信道稀疏特性
无人机巡检系统采用混合波束赋形系统时,信号在接收端经过ADC模数转换后,波束信号可表示为:
(1)
WRF为接收端模拟波束拟合矩阵,WBB为接收端数字波束拟合矩阵,接收端拟合矩阵均由相移器实现[3]。若信号采用5G毫米波混合波束赋形架构通信系统发送,频谱效率为:
(2)

1.2.2 信道优化—信道稀疏重构
无人机巡检系统中传输高清视频数据时,需要无人机回传链路的频谱效率最大化,而公式(2)中,收发端的形成器和拟合器具有耦合性,其非凸约束性,计算复杂度过高。为了便于得出最优解,优化思路为:将收发端的形成器和拟合器解耦,分别求发送端的混合波束成形矩阵和接收端的混合波束拟合矩阵。
假设接收端混合波束拟合矩阵是理想的,只考虑发送端混合波束成形矩阵FBBFRF优化,则最大化频谱效率R被优化为:
(3)
显然,公式(3)优化依旧具有非凸约束性,无法继续求出精确值。
无人机巡检系统是基于Massive MIMO的毫米波信道具有稀疏特性的,核心就是FBBFRF可以逼近最优数字波束成形矩阵Fopt。可利用对毫米波信道矩阵H奇异值分解的方案,公式(3)的优化问题进一步简化为:

(4)
(5)
公式(5)是一个典型的信号稀疏重构问题,而约束条件[FRF]τRF显示公式(5)依旧具有非凸约束性,无法直接得到R最优解,需要找到某种复杂度低、性能稳定的算法,得到接近系统最大频谱效率R最优解的次优解。
2 毫米波混合波束成形算法
2.1 传统算法
正交匹配追踪算法(OMP)是一种典型的、贪婪的压缩感知恢复算法[4],它在每次迭代中选择感知矩阵的最佳拟合列,然后在由所有先前选择的列跨越的子空间中执行最小二乘优化。其算法过程简单,但矩阵求逆过程烦琐,计算量大,耗时多,复杂度高,不利于实践。而无人机巡检系统所在的毫米波频段的波束赋形系统中,在大规模天线阵列下,必须使用复杂度更低、更精确、更稳定和耗时更少的算法。
GP算法采用最优化的梯度思想代替求逆矩阵的求解计算方式,该算法利用负梯方向性的不断逼近最优解,迭代出原始信号[5]。相比OMP,GP算法避免了因计算复杂的逆矩阵需要大量计算时间和存储空间的问题,降低了算法的复杂度,提高了信号重构的效率。但GP算法在迭代计算中逼近最优解的极小值时存在缺陷,导致迭代步长后期会变得很小,最终降低整体算法的重构速度,在无人机巡检系统中需要较多的RF射频模块才能获得理想的混合波束,不利于无人机基站要求。
2.2 低复杂度算法
综合考虑OMP算法和GP算法的优缺点,两种方法均使用了高精度码本,提高了系统性能,但都需要大量的计算过程和存储空间,增加了系统计算复杂度。因此,在无人机巡检系统中需找到一种低精度、低复杂度、分步骤迭代的算法,即初次迭代使用低精度码本筛选,二次迭代则发生在对筛选出的值附近进行高精度码本二次搜索。这样,无人机巡检通信系统既保持了稳定的系统性能,又降低了系统的计算复杂度。所以,低复杂度二次迭代GP算法的具体流程如图2所示。

图2 低复杂度二次迭代GP算法流程
低复杂度二次迭代GP算法使用了“低精度+小型高精度”模式:先使用低精度码本代替了高精度码本对矩阵首次迭代计算,降低了系统的计算复杂度;第二次迭代在上次迭代出的值周围再进行小型高精度二次搜索计算,保证了算法的可靠性。
3 仿真与分析
天线数目为8×8的UPA,天线接收数目为NRF=64,载波频率选用60 Hz,OMP算法、GP算法、改进GP算法通过仿真实验,对比其不同算法的迭代性能。
3.1 算法迭代速率比较
迭代速率越慢的算法在无人机巡检系统毫米波混合波束成形架构中需要更多的RF射频模块,无疑增加了无人机系统的载荷。重构迭代速度较快算法,选择天线阵元数目8×8,比较以上3种算法的迭代速度,从定量角度分析,即比较每次迭代计算中,残差和理想波束成形矢量的比值。
(6)
η值越小,得到的波束成形矢量越接近理想波束,表明迭代效果越好。
如表1所示,迭代次数NRF越大,低复杂度二次迭代GP算法η值下降得最快,说明其重构拟合速率最快,低复杂度二次迭代GP算法使用了“低精度+小型高精度”组合,降低了算法复杂度。迭代速率较OMP和GP算法有很大的提高,在第5次迭代时就比较接近理想值。在迭代次数NRF一定的情况下,改进GP算法具有较好的拟合精度。

表1 三种算法迭代速率对比
3.2 算法迭代时间
算法迭代时间直接衡量算法的复杂度,同时无人机在电路巡检任务时,对数据回传的实时性要求较高。对比3种算法的复杂度,对算法的迭代时间进行了1 000次独立的蒙特卡洛实验,对理想波束以不同的迭代次数和天线数量对迭代时间的影响进行仿真验证。
如图3、图4所示,在迭代次数和天线数目两个维度下,3种算法的迭代时间都是整体上升的趋势。其中低复杂度二次迭代GP算法具有最少的迭代时间,GP算法略大于改进GP算法,而OMP算法的迭代时间最高[6]。导致这个效果的原因,与算法本真特征有关。
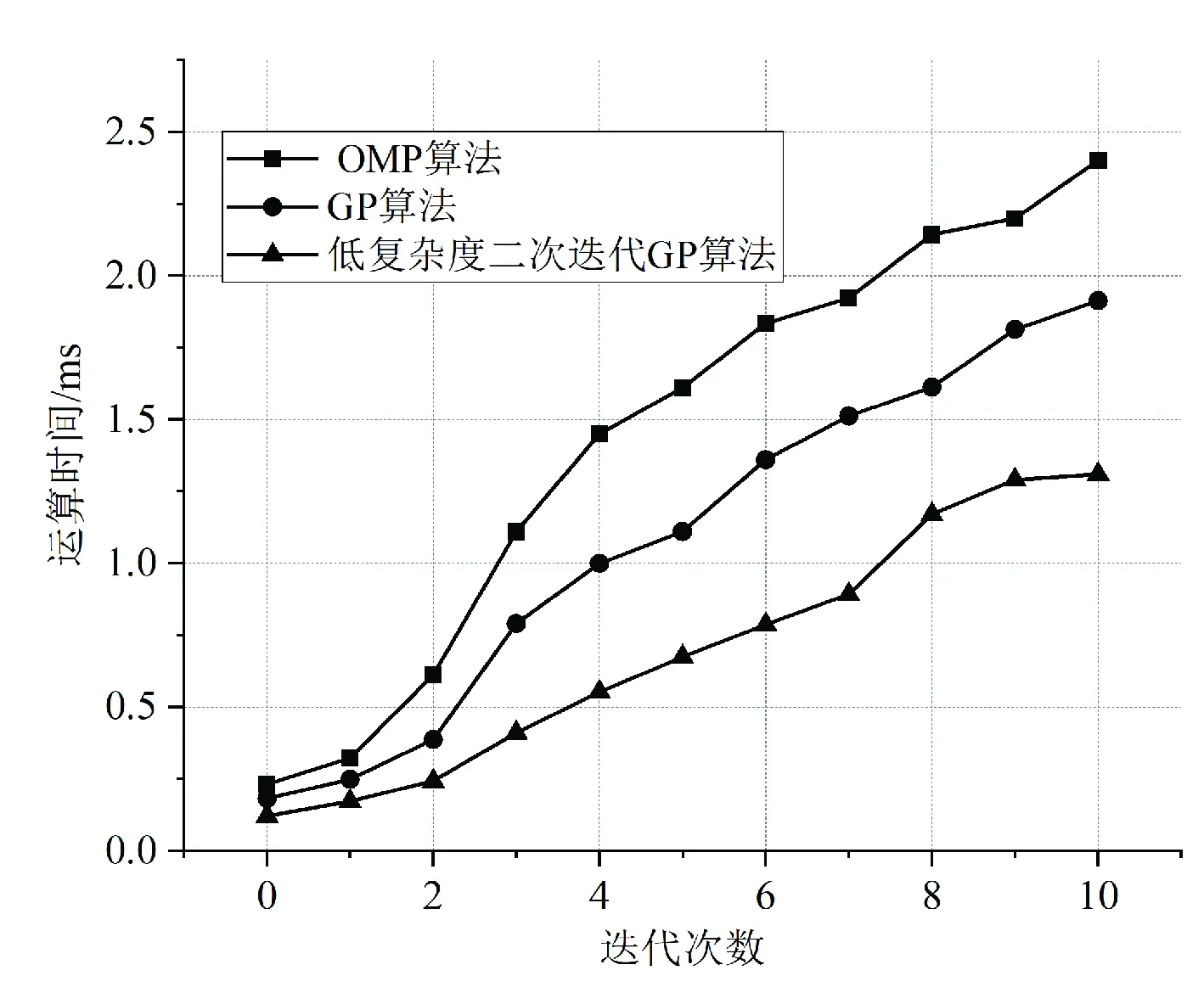
图3 迭代次数对迭代时间的影响
OMP算法需要对复杂的逆矩阵进行计算,增加了算法的迭代时间和复杂度。GP算法采用的方向性求解过程,避免了复杂的逆矩阵求解步骤,迭代时间比OMO算法有所降低。而改进的GP算法采用在GP算法的基础上“低精度+小型高精度”结合的计算方式,在第一次搜索中降低了计算的迭代时间和复杂度,同时在二次搜索中使用高精度码本,保证了系统的性能。

图4 天线数目迭代时间的影响
3.3 平均传输速率
为了评估无人机在巡检移动时覆盖区域的通信能力,对3种算法的平均传输速率进行仿真。如图5所示,根据不同信噪比SNR下,NRF=64,3种算法的传输速率性能比较,改进GP算法比传统的OMP算法和GP算法具有更高的平均传输速率,这是因为低复杂度GP算法得到的混合波束在区域边缘增益损失较小,整体覆盖效果较好,更适合无人机基站通信覆盖。
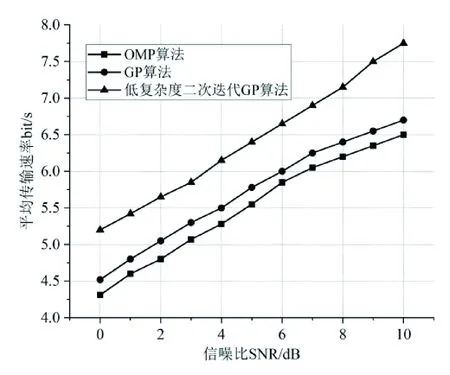
图5 信噪比SNR
4 结语
本文提出了在电力巡检背景下无人机基站波束覆盖场景下的波束改进方案,介绍了无人机5G毫米波混合波束成形系统架构。由于无人机移动系统受能力制约较大,通过研究更低复杂度和更快迭代效率的角度来降低无人机系统功耗。在分析和比较传统混合波束成形算法的基础上,从降低算法复杂度的角度出发,提出了“低精度+小型高精度”迭代搜索模式的低复杂度二次迭代GP算法。通过仿真实验,从算法迭代速率、迭代时间、平均传输速率3个角度对比分析3种算法的迭代重构性能,结果表明基于低复杂度二次迭代GP算法具有最低的复杂度和最快的迭代效率,适合在电力系统无人巡检系统中使用,为无人机5G毫米波基站的应用提供了一定的参考价值,也为研发实用的输电线路无人机巡检无线通信系统设备提供了参考。
