基于人机交互的供热管道爬行检测机器人研究
2022-02-18通辽热电有限责任公司吴占斌
通辽热电有限责任公司 吴占斌 金 一 吕 岩 田 雪 韩 滨
1 引言
机器人是一种自动化的机器设备,具备有一些与人或生物相似的能力,如感知、规划、运动及动作能力的协作等,机器人技术被视为20世纪人类最伟大的发明之一。特种机器人工作于非结构环境中,即工作在无法事先布置好的条件下进行,而且在工作进行过程中,环境或工作的内容可能随时发生变化[1]。开发非结构环境下工作的特种机器人,使人脱离危险作业的生产第一线,减轻人的劳动强度,是机器人发展的一个必然方向。目前国际上特种机器人技术的研究和开发非常活跃。在研究和开发的过程中,人们逐步认识到特种机器人技术的本质是由感知、决策、行动和交互四大技术组成的结合体。随着人们对特种机器人智能化本质认识的加深,特种机器人技术开始源源不断地向人类活动的各个领域渗透。特种机器人的新机构、新结构、新传感器和新型伺服驱动系统的开发,先进的控制算法、控制策略已经成为机器人研究的一个重要领域。
供热管道检测机器人是针对输送管道的管网检测渗漏、腐蚀等有直观观测效果,研制的一种特种机器人,综合智能移动技术和管道缺陷无损视频捕捉技术[2-3]。这类机器人能进入人所不及、复杂多变的非结构管道环境中,通过携带的摄像头装置和作业装置,以保障管道的安全和畅通无阻地工作[4]。
管道检测机器人主要应用于供热公司不同管径的供热管道,能够对供热管网进行系统和详尽的检测评估。管道检测机器人的研究为管道的检测、维护提供了新的技术手段,改变了传统管道开挖抽检的单一模式[5]。这种检测技术提高了管道检测的准确性,便于管道工程管理,维护人员分析了解管道缺陷产生的原因,开展对缺陷的评估,制订管道维护方案,消除管道安全隐患,在事故发生前就有计划地维修或更换管段,对于大量挖掘困难的小区、城市街道等也能够进行监测,从而节约大量的维修费用,降低管道维护成本,保障人民生活及财产安全。管道检测机器人也同样提高了管网检测的效率,以往由人工检测,检测的速度很慢,往往还有很多遗漏的情况,使用管道检测机器人后,管道检测效率不仅提高了2倍以上速度,也减少了需要的检测人员。因此,开展管道检测机器人的研究具有重要的科学意义和明显的社会经济效益[6-7]。目前,管道检测机器人的研究得到了各国的高度重视,也得到了我家部委和相关行业的重视。大量的管道检测维护需求为管道检测机器人的研究开发和应用提供了广阔的市场空间,将逐渐成为一项十分巨大的产业工程[8]。
目前,许多供热管道检测设备局限于整套产品十分笨重,出现场时携带不方便,而对于能适用于特殊管道工况且能完成检测任务的轮式机器人和电缆车本身没有太多便携化的空间[9]。针对如何不影响机器人固有功能前提下完成爬行机器人便携化成为重要的研究方向。此外,具有人机交互的智能管道内爬行检测机器人的研究也是一大热点[10]。为此,本文进行了适应于供热管道内检测的便携化人机交互式爬行机器人的研究。
2 爬行机器人系统设计
供热管道检查机器人能适应供热管内的工作环境,且可搭载视频等传感检测设备。主要构成包括爬行器(轮式机器人)、工业计算机和电缆车三部分。爬行器携带高清网络摄像头、有毒气体传感器,红外传感器等设备进入管线探测巡检,工业计算机负责远程控制爬行器,即时观察回传的管线内部视频,生成报告并存储,电缆车负责给爬行器提供电力和通信用缆。
2.1 管道爬行机器人的特点
2.1.1 设计功能
管道机器人检查系统最基本的结构有摄像头、控制器、监控显示器等。其主要工作对象是供热管网,检测管道缺陷情况及定位信息,通过专业软件处理和分析,报道管网真实情况,为供热管网提供一定积极的服务作用。采用滚动车轮式机器人,动力采用电机驱动,顶部设有摄像头、显示器,底部设有控制器。
爬行器机身模块化结构设计,各部分器件独立防水,并有安全气压监控,稳定性强,可根据不同工况需求,快速拆装模块,使用方便,维护简易。采用4轮独立驱动,具有超强的越障性能,附带车身倾斜角度显示与防倾覆报警功能单次作业时间可达2小时,可搭载其他设备,载重可达50kg。
2.1.2 工作环境
管道机器人爬行功能主要具有结构简单,负载能力较大且易于控制,采取电动移动方式,机器人装备结构轻、动作稳定、操作简单、移动速度快、转弯容易、便于操作。电动车轮结构简单且灵活,转向灵活及可靠。具体操作环境、使用工况管道属于竖直管道,机器人使用绳索掉下管道里进行观看。
爬行机器人性能参数:机器人本体780×480×330mm,重35kg(标配10寸轮尺寸),适用DN600以上管径,防护等级Ip68,像素前摄像头310万,后摄像头300万,镜头旋转角度360°轴向旋转,90°径向旋转,双电池供电,续航2小时;线缆车540×420×590mm,重45kg,线缆长度1000m,电池续航6小时。
2.2 机器人的组成
机器人本体包括机器人的云台以及伸缩检测头。其中机器人的爬行吸附机构作为机器人的主体部分,主要功能是搭载传感器、摄像头等检测设备,装配云台或伸缩检测头等末端执行机构以及为机器人本体提供动力。云台与伸缩检测头属于末端的检测执行机构,分别具备不同的功能与检测范围。机器人本体构成如图1所示。

图1 爬行机器人框架
2.2.1 线缆车设计
第一关节作为车体,主要管理机器人的动力爬行关节,供热管道检测机器人本体分为车体、行走机构和执行机构。其中车体是搭载平台,搭载传感检测用功能部件和执行机构。
车尾连接固定拖缆,检测机器人的电源和数据采用有线传输,一旦机器人在内部发生故障,可以通过拖缆将机器人拖出,执行机构接口连接不同检测任务下的不同检测探头。两个摄像头与照明模块分布在车体的前方和后方两个方向。机器人车体正前方的红外测距传感器,实时测量记载机器人在管道内部的高度信息及数据资料。电路板通过固定座安装在车体内部。
2.2.2 云台设计
云台的主要作用是通过在摄像头不断调整位置角度,对机器人爬行环境和SG热传管内壁区域进行视频检测时,实现摄像头的位姿不断调整。考虑到云台的末端位姿需要在空间中三个方向上变换,所以采用三轴机械臂的结构较为合适,如图2所示。
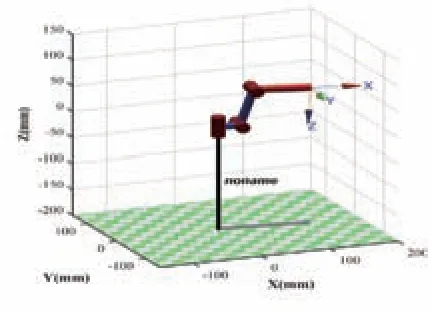
图2 云台机械臂运动学建模
另外结合机器人功能上的要求,并且基于机器人在SG热传管内部的工作环境和使用方案,云台的构型要满足以下几点:首先是自由度要求,机器人在执行任务时云台必须具备2个自由度;其次是检测范围的要求,云台末端可以侦查正前方,以及360°旋转,以达到对管道内壁的检测和拍照记录。
3 爬行机器人控制系统设计
如图3所示,爬行机器人的控制系统可分为两部分:就地端控制器和远程端控制器。就地端控制器主要实现就地采样检测的功能;远程端控制器主要实现人机交互的功能。

图3 上位机控制器框架
3.1 机器人就地端控制器
机器人就地端控制程序是通过C语言在Keil软件上编写而成,使用库函数的编写方法。STM32提供了丰富的固件库函数,方便广大编程者调用,固件库是一种固件函数包,它包括了绝大多数外设的驱动描述与应用实例。通过使用固件库,开发者无需掌握底层硬件细节,就可以控制硬件外设。
机器人的车体和末端执行器分别配置独立的控制器,两者之间采用主从结构,其中车体控制器为主机,末端执行器上的控制器为从机,两者通过485协议通信。车体与云台等末端执行器中的硬件电路均采用模块化设计。以车体控制器为例,机器人本体包括核心处理器模块、电源模块、485通讯模块、距离传感器模块、陀螺仪模块、微型摄像头模块、LED驱动模块、电机驱动模块等。
操作台实质上为多通道人机界面,主要由功能按钮以及组合液晶显示屏组成。操作台的触摸、按键进行远程控制,USB键盘输入必需资料。通过网口或Wifi与爬行器主控和网络摄像头通信。高清输出的海康威视硬盘录像机8108HFS-ST,它每个通道都是4CIF输出,能够实时将车体及云台及伸缩臂上返回的视频信号进行处理并通过显示器显示。视频播放存储支持最多8路的视频播放与存储。通过光纤电缆连接,客户端能够播放实时视频和历史记录。本地解码网络摄像头视频,并即时叠加管道信息,爬行器信息等资料到屏幕。高亮屏幕显示网络摄像头回传的视频。
3.2 机器人远程端控制器
远程端控制程序主要包括控制模块、数据处理模块,通信模块和仿真模块以及人机界面模块等。数据处理及维护软件模块是整个软件的基础,为整个软件提供分析数据,其包含系统各个部分的状态信息。
控制模块主要功能是依据机器人检测任务,规划机器人路径、轨迹及运动参数,规划末端执行器位姿调整及工作状态等。通讯模块负责管理远程控制器和就地端控制器之间的通信,包括发送读指令,收集系统数据,发送写指令,控制系统运行。采用抗拉力强的光纤通讯,数据传输低延时轻量化平板触控终端,终端与线缆车之间采用无线传输技术可进入DN400以上的管道,单次最长检测距离可达1000m,可适用于大直径管道、箱涵等。远程端控制器程序配置包括显示系统状态显示与参数设置界面和显示车体视频的视频界面,并在后台配置有显示和管理系统状态的后台界面。
4 结语
本文提出一种基于人机交互的供热管道检测爬行机器人系统设计方法,机器人设计满足便携化要求,同时具备就地端和远程端的交互能力,能够适应管道检测过程中各种突发状况。爬行机器人既融合机器人的自动化,也引入人类监测者的判断和操作,加强整个系统的智能性,有效提高了工作效率,避免了不必要的能耗操作,对未来维修和检测供热管道的机器人研究具有重要指导价值。
