组网雷达自适应模糊CFAR检测融合算法
2022-02-16龚树凤龙伟军潘明海
龚树凤, 龙伟军, 贲 德, 潘明海
(1. 浙江工业大学信息工程学院, 浙江 杭州 310012; 2. 南京电子技术研究所, 江苏 南京 210038;3. 南京航空航天大学电子信息工程学院, 江苏 南京 210016)
0 引 言
组网雷达系统为了提高系统的目标检测概率,通常对多部雷达所接收的回波信号按照特定的方式进行信息融合,因此众多的国内外学者对组网雷达信号的检测融合方法展开了深入研究。一些学者研究了决策级的信息融合算法,具体如Ramanarayanan和Ni等,采用贝叶斯准则,直接对各雷达检测器的检测结果进行融合,仿真结果表明了算法的有效性,但该算法必须明确各雷达检测器的回波信噪比(signal to noise ratio, SNR)。Liu和Rao等采用最大似然准则,利用蒙特卡罗仿真获取各参数的估计量,对雷达信号进行了融合并取得了较好的性能。陶然等则利用奈曼皮尔逊准则,先对每部雷达的检测概率实施局部判决,然后在融合中心仅对局部判决结果进行融合,研究了自适应的融合算法,并获得了较优检测性能。以上基于决策级的信号融合算法,由于融合的信息仅仅是各检测器的判决结果,信息量较小,使得最终系统的融合性能提升受限。为改善融合性能,一些学者对信号级的检测融合算法进行了研究。Banavar等研究了如何在信号传输的过程中,对信号进行检测融合,由于信号传输量过大,使得算法实现较为复杂。胡勤振等则为了减小信号传输量,在检测融合过程中增加了局部检测门限,若某雷达检测器超过该局部检测门限,则将该雷达信号送至融合中心进行融合,该算法在各传感器SNR已知的情况下,获得了较好的检测效果。Ciuonzo和郭黎利等对基于Rao方法的分布式检测融合进行了研究,在已知各传感器检测性能参数或SNR的条件下,使检测性能得到了一定幅度的提升。
考虑到在实际应用环境中,经常难以获得所测对象较完整且精确的数学模型及其相关统计知识,致使传感器所获得的测量值带有不精确性,比如说测量值含有随机性、模糊性等不确定性。针对这种不确定性,一些学者们开始将模糊集理论引入到分布式检测融合系统并取得了一定的研究成果。Leung等推导了一个模糊隶属度函数,由此获得了[0,1]区间内的判决软连续门限值,并将该软连续门限值代替目标检测中的固定门限值,从而将模糊理论引入到目标检测中,实现了用模糊软判决的方法进行目标检测。随后,Leung等在文献[12]中对仅有两个传感器的检测系统,进行了模糊融合准则的研究。 Hammoudi等在文献[12]基础上,以有3个传感器的检测系统为例,研究了分布式的模糊检测融合算法,并基于传统的单元平均(cell averaging, CA)和有序统计(ordered statistic, OS)恒虚警(constant false alarm rate, CFAR)检测算法,提出了分布式的模糊CA-CFAR和分布式的模糊OS-CFAR。郝程鹏等则先后在无偏最小方差估计(unbiased minimum-variance estimator, UMVE)和自动索引CA(automatic censored CA, ACCA) CFAR检测方法的基础上,研究了分布式模糊UMVE检测系统和分布式模糊ACCA检测系统,并将模糊ACCA-CFAR检测算法用于扩展目标积累检测中,取得了较好的检测性能。文献[17]则针对威布尔杂波背景研究了一种加权有序统计模糊CFAR(weighted ordered statistic fuzzy-CFAR, WOSF-CFAR)检测算法,仿真结果表明了算法的有效性。然而在组网雷达系统中,由于被探测目标的雷达截面积与各雷达检测器所处的位置有较大关系,而且有些情况下无法获知或者难以获知雷达位置与目标的具体关系,故有时难以估计各雷达接收的回波信号的强度。再加上各雷达所处的环境与各自性能的差异,想要获得各检测单元的回波SNR,在SNR已知的情况下完成组网雷达的信号检测融合是比较困难的,因此文献[18-19]基于模糊逻辑和筛选平均检测-CFAR(censored mean level detector-CFAR,CMLD-CFAR)算法,研究了分布式模糊最大CMLD-CFAR(maximum-CMLD-CFAR, MX-CMLD-CFAR)系统的融合算法。以有3个传感器的检测系统为例,在SNR未知的情况下,通过计算各雷达检测结果的可信度再采用表决融合的方式和模糊代数积融合准则,自适应选择传感器数目进行信号融合,取得了较好的性能。但可信度表决模块设计采用二元逻辑器件通过与或运算等实现,随着组网雷达数目的增加,表决器的复杂度大大增加。
为了解决上述不足,实现在无SNR已知条件下的雷达信号融合检测,本文在文献[18]模糊融合检测的基础上,结合决策级和信号级检测,设计了一个由可信度综合模块、数据融合模块、比较判决模块和反馈控制模块组成的反馈融合中心,并基于该反馈融合中心提出了一种可用于雷达发射能量优化的双门限自适应模糊检测融合算法。首先,各雷达在SNR未知的情况下,对目标区域利用模糊MX-CMLD-CFAR算法进行模糊检测,并计算该雷达检测结果的可信度;然后各雷达将可信度送至融合中心的可信度综合模块,该模块根据各雷达的检测可信度以及预设的可信度权重系数,计算整个组网系统的可信度,通过对综合可信度的判决筛选出可以传送至数据融合模块的具体雷达;被选中的雷达将回波数据的模糊隶属度送至融合中心的数据融合模块,按照一定的模糊融合准则进行融合以获得全局隶属度;最后全局隶属度与全局判决门限进行比较,给出最终的判决结果。而融合中心的反馈控制模块则在可信度综合模块和比较判决模块的控制下,实现对各雷达发射能量的控制,尽可能保证总体探测概率满足要求的条件下节约发射能量。
1 模糊MX-CMLD-CFAR
1.1 MX-CMLD-CFAR
MX-CMLD-CFAR是一种有序类的CFAR检测器,是为提高多目标干扰背景中的检测概率而提出的。该检测器将前后参考滑窗中的单元样本按照幅值由小到大的方式进行排序,删除若干个样本后,对剩余的样本通过加权平均的方法来估计杂波的强度,再用最大逻辑选择选取强度较大者,作为检测器对杂波强度的估计,其原理框图如图1所示。
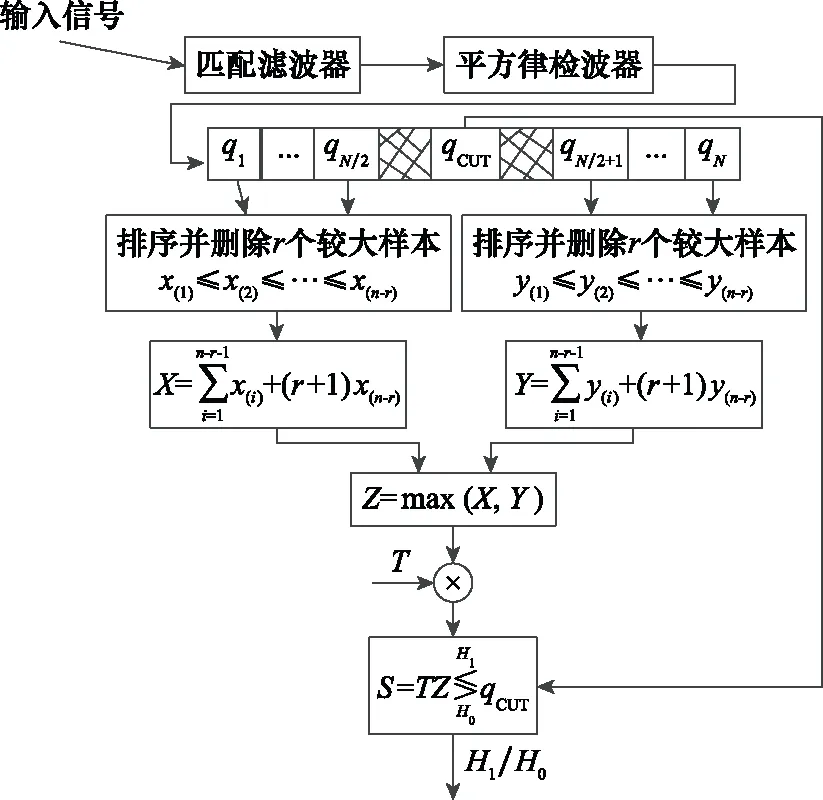
图1 MX-CMLD-CFARFig.1 MX-CMLD-CFAR
排序后样本值(),()(,=1,2,…,-)不再是统计独立的,为求出和的概率密度函数,需引入线性变换:
=(--+1)(()-(-1)),=1,2,…,-
(1)
经式(1)可推得统计独立的随机变量:

(2)
假设目标处在高斯的均匀杂波背景中,由于参考单元样本数据(=1,2,…,)是统计独立而且同分布的,因此和的概率密度函数可以写为

(3)
式中:(·)是伽玛函数。
和的累积分布函数为


(4)
根据概率论的知识,可以得到检验统计量的概率密度函数为
()=()()+()()=
2()()
(5)
假设目标为Swell II型,采用双择假设,表示检测单元中的检测统计量(),则有两种假设下的概率密度函数为
:()=exp(-)
(6)
:()=(1)exp(-)
(7)
式中:=1+,为目标信号与噪声的平均功率比值。
由于判决门限=是一个随机变量,计算虚警概率时需要对求统计平均:
={Pr[()≥|]}=

(8)
将式(5)和式(6)代入式(8)后,推导可得
=2(2+)-(-)(;-,--1),
=1(2+)
(9)

1.2 模糊MX-CMLD-CFAR
利用模糊检测器,需要定义隶属度函数。隶属度函数用介于[0,1]区间内的连续值来表征“有目标”和“无目标”两种假设成立的程度,定义为
()=Pr(>|)=1-()
(10)
式中:是服从高斯分布的观测值,=表示待检测单元与背景功率的比值;为与比值相对应的随机变量;()为的累积分布函数。
由此可以看出, “无目标”假设下,强参考单元值被赋予小的隶属度值,因此隶属度函数随参考单元强度增加而单调递减。模糊CFAR准则采用如下判决准则:若()<,则声明目标存在。结合MX-CMLD的计算,可推导得到模糊MX-CMLD-CFAR的隶属度函数为

(11)
因为对任意连续随机变量应用累积分布函数形成的随机变量均匀分布于[0,1]区间,所以() 均匀分布于[0,1]。模糊MX-CMLD-CFAR的检测原理图如图2所示。

图2 模糊MX-CMLD-CFARFig.2 Fuzzy MX-CMLD-CFAR
由此可以看出,采用模糊MX-CMLD-CFAR检测算法,判决门限与SNR无关,可在SNR未知的情况下完成目标检测。
根据文献[18]的分析,选择如下的可信度函数:
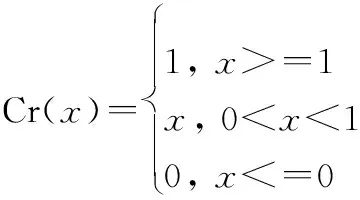
(12)

2 自适应分布式模糊CFAR检测融合算法
本文以含有4个雷达的组网系统为例,如图3所示。分布式检测融合系统利用融合中心将单个传感器(雷达)对目标的检测结果进行数据融合来决定整个系统的检测性能。理论上,传感器发射功率越大、融合中心融合的检测信息越多,系统的检测性能就越好。然而,单传感器传输到融合中心的信息越多,系统的发射功率不仅会增加,还会影响系统的传输、实时性能等,增加系统的数据处理负担。因此,设计了基于投票表决的反馈融合中心,将融合中心分为4个模块,分别为可信度表决模块、数据融合模块、比较判断模块和反馈控制模块。考虑到文献[18]中3个传感器仿真时,在可信度投票表决模块采用依次判断每个传感器的可信度值,并通过组合等形式最终获得可融合的雷达数据,电路实现比较繁琐,尤其雷达数目较多时,需要判断的组合情况种类太多,本文提出了加权的可信度表决模块,通过设定好的雷达可信度权值,计算综合可信度,再对综合可信度进行判决即可。
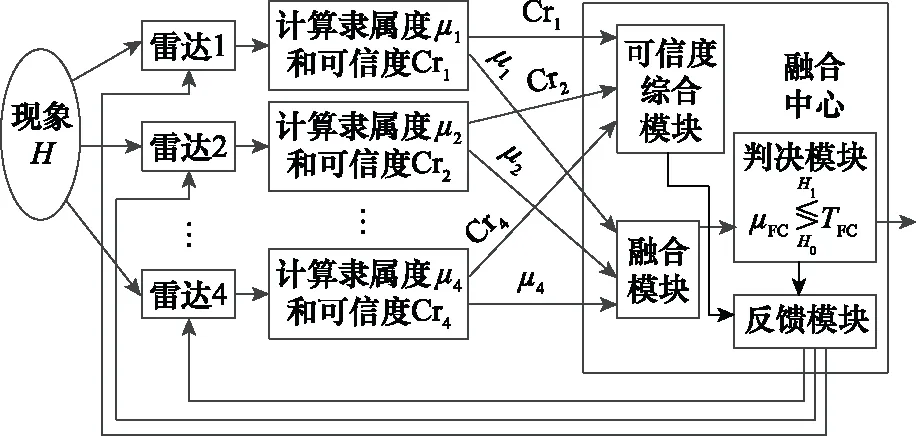
图3 自适应分布式模糊CFAR检测融合框图Fig.3 Block diagram of adaptive distributed fuzzy CFAR detection fusion
具体工作流程如下:
每个雷达先对目标进行短时间的探测,计算探测时的隶属度和可信度Cr;
各雷达将检测的可信度Cr送至融合中心的表决模块,表决模块对各可信度进行加权处理,得到组网雷达的综合可信度Cr;
综合可信度与预先设置好的可信度门限进行比较,决定哪些雷达可以将接收数据的隶属度送至融合中心;
融合中心根据特定的融合准则进行信息融合,得到全局隶属度函数全局判决门限,并送至判决模块;
判决模块进行判决,如果全局隶属度函数大于全局判决门限,则判断为有目标存在,否则无目标;
全局累计判决,若全局检测概率过低,反馈模块则反馈给各雷达,各雷达需增加信号发射能量以提高SNR来增加检测概率;若全局检测概率满足要求,有些雷达未参与融合,反馈模块则反馈给未参与信息融合的雷达关闭雷达信号,节省发射功率。
根据文献[18]可知,分布式模糊融合检测算法中,模糊代数积融合准则的检测效果较好,因此本文采用模糊代数积融合准则,假设参与融合的雷达检测器数目为,根据综合可信度Cr的值而决定,为了体现单部雷达检测概率(可信度Cr)越大,参与融合中心信息融合的概率越大,其分配的权重也越大,Cr表达式如下:

(13)
融合中心的全局隶属度函数为

(14)
可得到虚警概率和融合中心阈值的关系为

(15)
3 仿真与分析
本文利用Matlab软件,对所提出的自适应分布式模糊CFAR检测融合算法进行了仿真验证。仿真中参数设定:融合中心全局虚警概率=10,每部雷达传感器参考单元长度=32,目标类型Swerling II 型,对于MX-CMLD,=4,这样MX-CMLD具有对抗8个干扰目标的能力,融合数据蒙特卡罗循环次数=2 000。
可信度综合模块判决准则:首先对4部雷达传送进来的短时检测概率进行由大到小的排序,排序后的可信度记为Cr(1)>Cr(2)>Cr(3)>Cr(4);考虑到可信度越高,单部雷达检测结果越可靠,因此各雷达分配不同的权重因子,=[04, 03, 02, 01]。当综合可信度Cr>0.4时,选择可信度较高的两部雷达数据进行融合;当Cr<0.2时,4部雷达均参与数据融合;否则选取可信度较高的3部雷达数据进行融合。
考虑到每部雷达与目标所处位置的距离可能不同,每部雷达的发射功率和SNR可能不同,仿真过程中特意设置每部雷达SNR不同。
3.1 与文献[18]结果对比
考虑到文献[18]采用了3个传感器协同工作,本文首先仿真了均匀背景中3部雷达融合的数据。3部雷达按照可信度由高到低的顺序分配的权重因子为=[045, 035, 020]。当计算所得综合可信度大于04时,系统自动选择可信度较高的两部雷达参与数据融合,否则3部雷达全部参与数据融合。设置雷达接收信号的SNR如下:雷达1的SNR变化范围为[0,14] dB,雷达2的SNR变化范围为[3,17] dB,雷达3的SNR变化范围为[6, 20] dB。
图4和图5给出了本文自适应融合算法与文献[18]融合算法及不同数目雷达融合数据的对比,横坐标均以雷达1的SNR为横坐标,即雷达1的SNR为0 dB时,此时雷达2的SNR为3 dB,雷达3的SNR则为6 dB。

图4 两种算法检测概率对比Fig.4 Comparison of detection probability between two algorithms
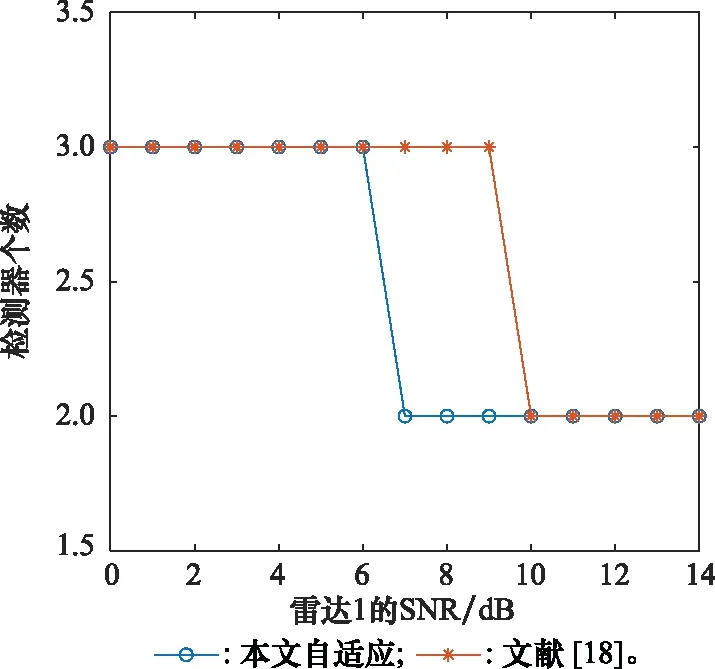
图5 两种算法融合检测器个数对比Fig.5 Comparison of number of fusion detectors between two algorithms
由图4和图5可以看出,当每部雷达工作的SNR都比较小的时候,算法会自动选取3部雷达数据进行融合,以保证有较高的检测概率。随着每部雷达SNR的增加,每部雷达的检测可信度也增加,自适应融合算法在雷达1的SNR为8 dB时开始选取两部性能较好的雷达参与融合,此时融合检测概率为0.973。而文献[18]继续采用3部雷达数据进行融合,融合检测概率为0.989,二者相差不大。当雷达1的SNR达到11 dB时,文献[18]算法开始自动选取可信度较高的两部雷达参与融合,本文算法和文献[18]算法此时融合检测概率均为1。由此可以看出,本文所提算法通过计算综合可信度来选择融合雷达数据,也是可行的。相比于文献[18],融合中心可信度表决模块更容易实现,算法简单。
3.2 均匀背景中的融合检测
均匀背景中,设置雷达接收信号的SNR,雷达1的SNR变化范围为[0,12] dB,雷达2的SNR变化范围为[2,14] dB,雷达3的SNR变化范围为[4,16] dB,雷达4的SNR为[6,18] dB。图6和图7给出了自适应融合算法与不同数目雷达融合数据的对比,图8给出了自适应融合时每部雷达的工作状态。为了画图方便,图6~图8均以雷达1的SNR为横坐标,即雷达1的SNR为0 dB时,雷达2的SNR为2 dB,雷达3的SNR为4 dB,雷达4的SNR为6 dB。
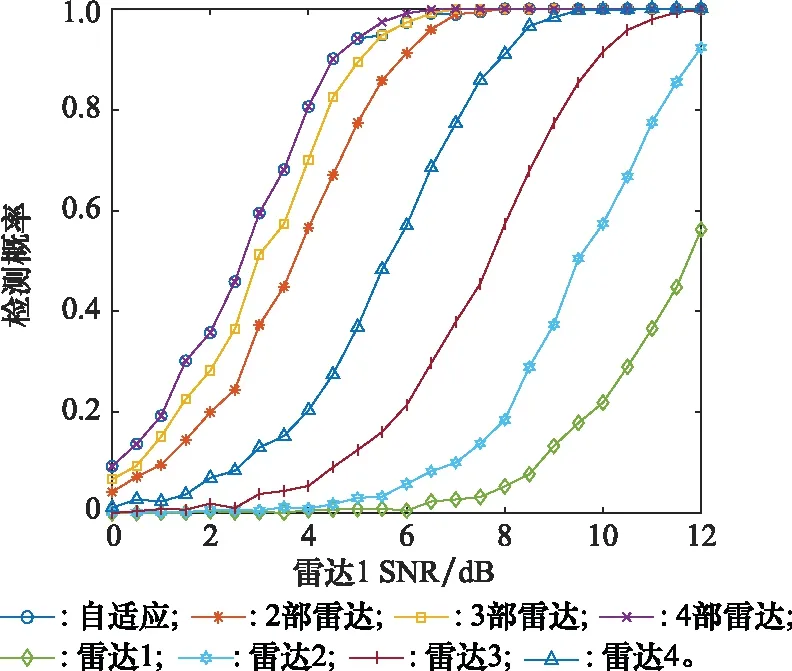
图6 均匀背景中的检测概率Fig.6 Detection probability in uniform background
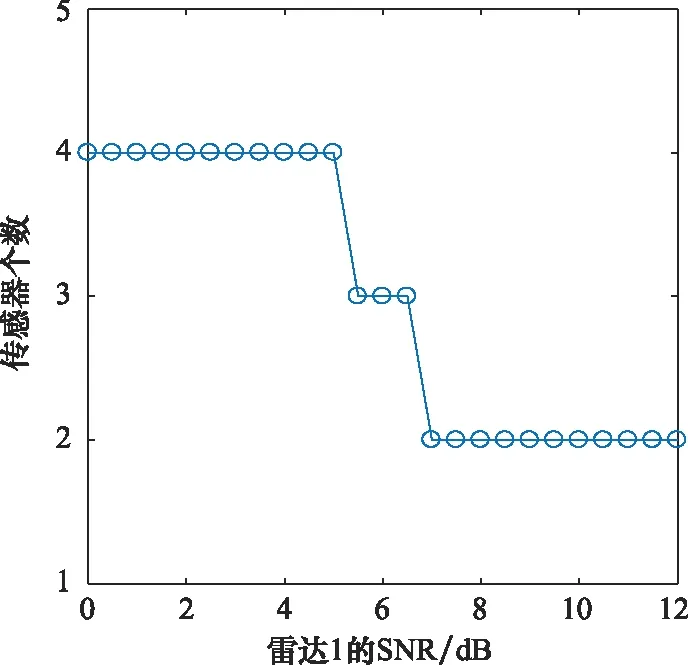
图7 均匀背景中自适应融合检测器个数Fig.7 Number of adaptive fusion detectors in uniform background
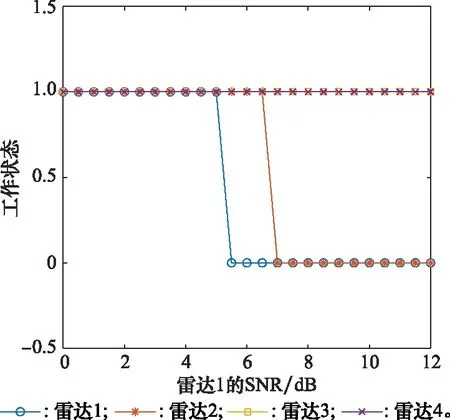
图8 均匀背景中自适应雷达工作状态Fig.8 Adaptive radar working state in uniform background
由图6~图8可以看出,当每部雷达工作的SNR都比较小的时候,算法会自动选取4部雷达数据进行融合,以保证有较高的检测概率。随着每部雷达SNR的增加,每部雷达的检测可信度也增加,自适应融合算法选取3部性能较好的雷达参与融合,不需要融合的雷达则可以关闭发射信号,比如图7中的雷达1状态为0时,表示已关闭该雷达。当两部雷达的SNR较大达到一定程度时,自适应融合算法则会选取两部雷达数据进行融合,关闭其他两部雷达,如图8中的雷达1和雷达2,工作状态均为0,以节约能量。
3.3 多目标干扰背景中的雷达检测
图9~图11为不同数目的雷达在多目标干扰背景中的检测性能,仿真中设置左右滑窗的干扰目标数目均为4,左滑窗干扰目标所处的窗口位置为[4, 6, 10, 15],右滑窗干扰目标所处的窗口位置为[20, 22, 26, 31],每部雷达的干扰噪声比(interference to noise ratio, INR)满足,INR=SNR,=1,2,3,4。
由图9~图11可以看出,多目标干扰背景中,当每部雷达的SNR增大时,单部雷达和融合后的检测算法性能都会增加,而且自适应融合的雷达数目会减少,以节约能量。

图9 多目标干扰背景中的检测概率Fig.9 Detection probability in multi-target interference background
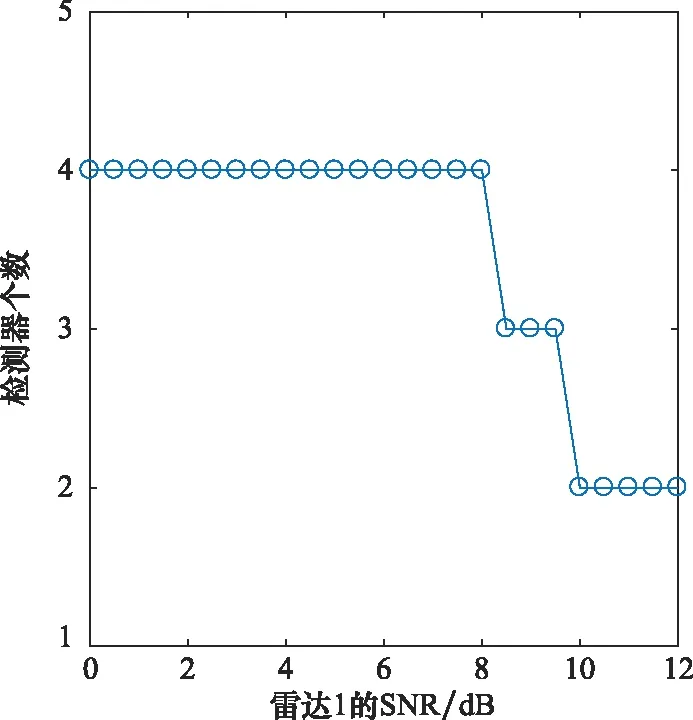
图10 多目标干扰背景中自适应融合检测器个数Fig.10 Number of adaptive fusion detectors in multi-target interference background

图11 多目标干扰背景中自适应雷达工作状态Fig.11 Adaptive radar working state in multi-target interference background
3.4 雷达能量的自适应控制
以4部雷达融合为例,对雷达能量的控制进行了仿真,假设噪声的功率为1,通过调整雷达的信号能量以达到预定的检测概率。
图12和图13是开始时刻4部雷达工作的SNR都比较低的情况下,即起始时刻4部雷达发射信号的能量较低,融合后的检测概率不满足要求,随着迭代次数的增加,则自适应调整4部雷达的信号发射能量,直至满足系统要求。
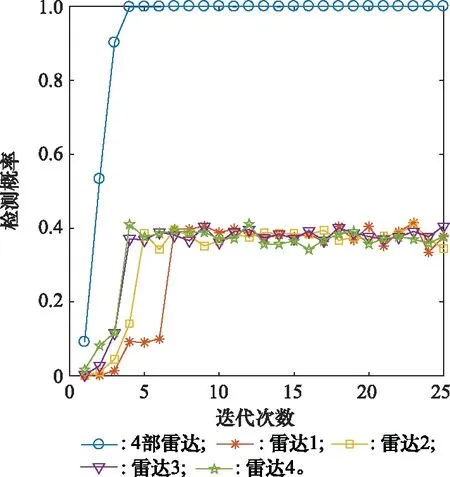
图12 迭代时的检测概率(4部雷达初始均为低SNR)Fig.12 Detection probability for iteration times (the initial SNR of four radars is low)

图13 迭代时的信号能量(4部雷达初始均为低SNR)Fig.13 Signal energy for iteration times (the initial SNR of four radars is low)
图14和图15是开始时刻雷达1和雷达2工作在低SNR情况下,雷达3和雷达4工作在高SNR情况下。可以看出,系统会按照检测概率要求,自适应降低雷达3和雷达4的能量,提高雷达1和雷达2的信号能量,直至满足系统要求为止。
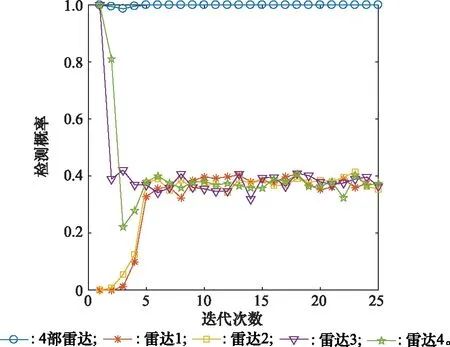
图14 迭代时的检测概率(2部雷达初始均为低SNR)Fig.14 Detection probability for iteration times (the initial SNR of two radars is low)
表1给出了与图15对应的雷达信号能量值,由表1可以看出,起始时刻,组网系统的检测概率可以达到1,系统总能量

表1 雷达融合时信号能量的控制

图15 迭代时的信号能量(2部雷达初始均为低SNR)Fig.15 Signal energy for iteration times (the initial SNR of two radars is low)
为20.202 2,但经过系统多次迭代调整后,在系统总能量14.2附近,系统的检测概率依旧可以达到1,从而节省了系统的总能量。
4 结 论
本文在组网雷达检测融合回波信号SNR未知的条件下,基于模糊逻辑和MX-CMLD算法,提出了一种高效的自适应分布式模糊MX-CMLD-CFAR检测算法,并给出了该检测算法的自适应融合检测框架。在Swerling II型目标及高斯分布噪声假设下,针对均匀背景、多目标干扰背景的雷达目标检测情况进行了融合检测仿真。仿真结果表明,自适应分布式模糊MX-CMLD-CFAR算法具有较好的检测性能,并可以在一定程度上实现雷达资源的管理。
