VICTS天线跟踪系统关键技术研究*
2022-02-12高巍赵亮
高 巍 赵 亮
(1.中国电子科技集团公司第三十九研究所 西安 710065)(2.陕西省天线与控制技术重点实验室 西安 710065)
1 引言
采用VICTS技术的天线具有超低剖面-高度仅十几公分;集成度高-天线内置控制单元、功放及跟踪接收机;重量轻,安装灵活等特点,并且可以满足在车辆行进过程中的正常通信业务,具有广泛的应用前景[1]。
该类型天线原理与传统抛物面天线具有很大的区别,存在波束指向算法复杂,增益跟随波束仰角和信号频率变化等问题,导致在跟踪过程中难以对准目标,动态性能较差,以及在复杂遮挡环境下波束指向被拉偏从而导致失锁等问题。为解决上述问题,本文从VICTS动中通跟踪系统原理出发并结合该类天线特点,对跟踪过程中存在的一些问题进行分析并提出解决方案。
2 VICTS天线跟踪系统
VICTS天线采用二维断面扫描装置,结构上共分三层,分别为激励层、CTS层和极化层。各层天线面均为同心圆盘结构,并通过天线控制单元、电机以及机械传动结构带动天线面旋转。波束扫描依靠激励层和CTS层的协同控制实现。VICTS天线自跟踪系统通常采用图1所示方案。
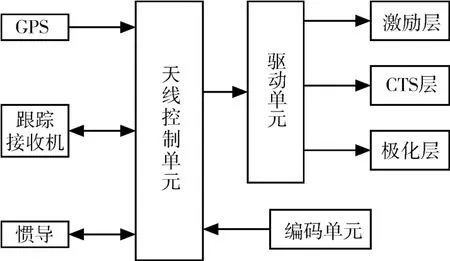
图1 VICTS跟踪系统原理框图
VICTS动中通天线自跟踪系统以天线控制单元为核心,利用一系列传感器配合伺服系统,能够实现在静止或动态情况下对卫星的精确指向。在跟踪开始阶段,依靠GPS获取当地经纬度并计算出卫星指向。通过惯导测得车体姿态角,将卫星指向从大地系转换到测量系下,并利用天线控制单元并结合波束指向算法,控制各层天线面旋转一定角度使波束指向卫星。然后通过跟踪接收机不断采集的信号电平的大小,采用圆锥扫描等信号闭环方式微调指向,一方面可以消除系统结构误差,使天线精确指向卫星;另一方面对惯导航向进行实时校准,保证天线对卫星长期稳定的跟踪。
3 VICTS天线跟踪系统关键技术
传统抛物面天线的增益是恒定值,与其波束仰角无关,因此在跟踪阶段对准卫星时,其信号电平的大小为定值。由VICTS天线的原理可知,其增益随波束仰角和信号频率变化,导致在卫星跟踪过程中信号电平随仰角变化而变化,在采用信号闭环方式时,由于天线增益的变化,导致计算出错误的调整量,从而影响跟踪性能。
同时对于VICTS天线而言,由于其不存在实际的物理轴,没有安装速度陀螺的平台,因此无法像抛物面天线一样应用陀螺环方式来隔离载体姿态变化,导致动态跟踪性能较差。
在实际应用过程中会发现,当天线经过城市建筑物、绿化带树林等区域时,会发生频繁进入遮挡然后脱离遮挡,且存在全遮挡、部分遮挡、长遮挡、短遮挡之间不断来回切换的情况。这种复杂遮挡会导致信号电平时有时无,且有时不是最大值,此时极易干扰信号闭环过程导致天线指向拉偏引起失锁情况,为此同样需要制定相应的遮挡策略解决该问题。
3.1 系统标校
由于VICTS天线增益随信号频率和波束仰角发生变化,因此考虑在远场测试条件下通过系统标校将不同仰角下的天线增益标定出来,在信号闭环过程中将低仰角下增益跌落值补偿进去,这样可以避免上述情况从而得到平稳的跟踪效果。
VICTS天线的波束指向由激励层和CTS层的之间的角度关系决定,在天线生产装配过程中存在一定的结构误差,使得天线的电轴零点与理论值有一定的偏差,导致天线指向精度变差。在系统标校过程中可对此进行一并标定,消除系统误差从而获取更高的指向精度。
3.2 动态跟踪精度
动中通系统动态跟踪精度主要取决于两方面因素:速度补偿精度和伺服带宽。由于VICTS天线无法引入陀螺环隔离载体姿态变化,因此考虑利用安装在天线平台上的惯导输出的轴速度来计算出应补偿到天线电轴的速度前馈量。速度前馈量的计算公式如下所示。

其中:vaz、vel分别为方位和俯仰方向速度补偿量;Zv、Xv、Yv分别为载体方位、俯仰、横滚旋转轴速度;A、E为方位和俯仰载体系指向角度。
同时由VICTS天线特点可知,其结构谐振频率要较抛物面天线高很多。因此还可以适当提高其伺服带宽来补偿由结构精度带来的前馈补偿误差,从而获取更高的跟踪精度。
3.3 复杂遮挡环境
根据复杂遮挡对信号电平的影响特性,提出一种利用信号电平波动大小作为判据的方法来解决该问题。
在天线进入跟踪状态并对准卫星后,不断采集一段时间内的信号电平并实时更新。通过计算该段时间内的信号电平波动大小是否大于正常跟踪时的电平波动值,并将其作为是否需要进行指向调整的判断依据。当信号电平波动较大时,认为此时处于遮挡阶段,放弃指向调整。当信号电平波动较小时进行指向调整。这种策略能有效避免由于复杂遮挡过程引起的指向偏离问题。
4 实验与分析
将上述提到的方法应用到某型VICTS动中通天线系统进行验证测试,天线增益在40°波束仰角时等效0.6m口径抛物面天线。分别在二级公路、剧烈颠簸路面、复杂遮挡环境下进行跑车实验。
4.1 平直路面跟踪精度测试
在二级公路以80km/h时速行驶进行测试,系统跟踪亚太六号同步卫星,测试过程对其信号电平进行采样并记录如图2所示。
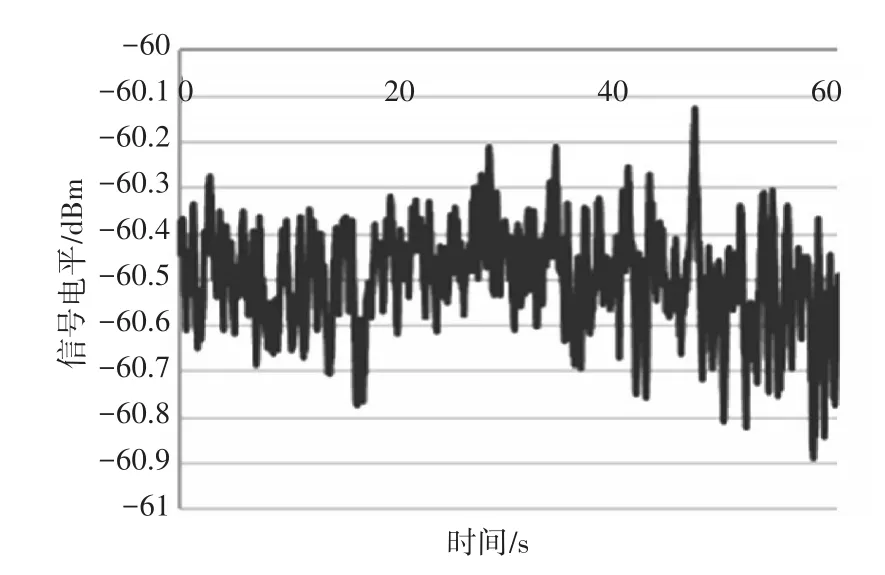
图2 平直路面跑车测试结果
可以看出车辆行进过程中信号波动较为平稳,在-60.15dBm~-60.85dBm之间,极值变化小于0.7dB。按《公安车载应急通信系统技术规范》测试标准,采用电平跌落法计算跟踪精度为0.113θ0.5,远大于其0.13θ0.5的标准,跟踪精度良好。
4.2 颠簸路面动中通能力测试
为了模拟最恶劣的应用场景,选取一段剧烈起伏路面进行测试,并进行连续转弯,同样跟踪亚太六号同步卫星,并将测试过程中信号电平与载体姿态进行采样并记录如图3所示。
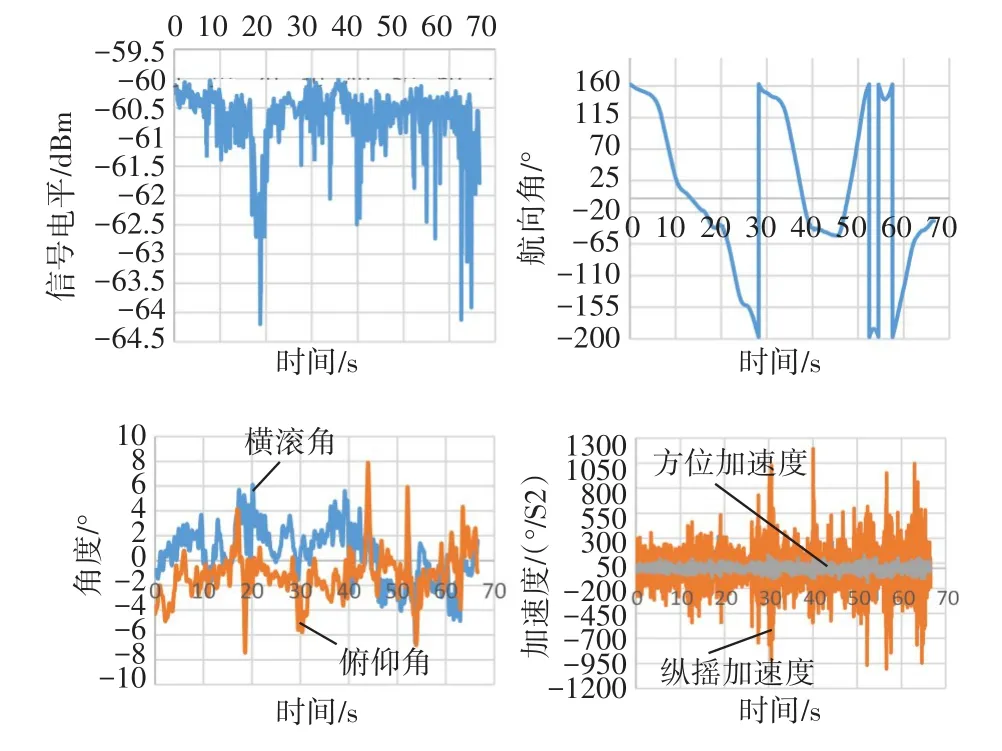
图3 颠簸路面跑车测试结果
可以看出车辆行进过程中载体姿态变化剧烈,横滚角和俯仰角在-8°~+8°之间变化,最大加速度超过1000 °/S2。航向变化在-180°~+180°之间,航向最大加速度超过130°/S2。由于VICTS天线本身增益随波束仰角发生变化,因此测试过程中始终用寻星仪监测电视信号质量,画面全程无卡顿,系统未失锁。
4.3 复杂遮挡环境下跟踪系统测试
在城市道路进行遮挡测试,沿途经过大楼、绿化带树林、电线杆、广告牌等遮挡物。同时控制行车状态进行不同遮挡时长的测试,对全遮挡、部分遮挡、长时间遮挡、短时间遮挡等各种类型的遮挡情况进行测试,测试时长60min,测试全程信号电平变化如图4所示。
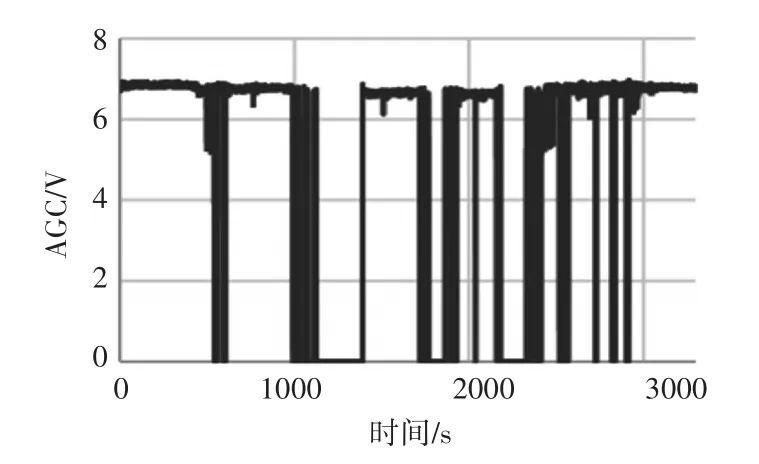
图4 遮挡测试结果
可以看出,在复杂遮挡环境下长时间跑车测试过程中,电平均在遮挡消失瞬间后迅速恢复,没有出现波束指向被拉偏导致系统失锁的情况。
5 结语
本文针对VICTS天线在实际应用场合下影响其跟踪性能的主要因素进行分析并给出解决方案。通过在不同路面和遮挡环境下的跑车实验结果来看,系统实际跟踪效果良好,验证了所提方法的有效性。
