基于生物集群智能的FANET移动模型研究*
2022-02-12汤小芳杨余旺谢勇盛赵启超
汤小芳 杨余旺 谢勇盛 赵启超
(南京理工大学 南京 210094)
1 引言
近年来,小型无人机(UAVs)在民用领域越来越流行[1],配备多种传感器和无限网络组件的无人机为飞行自组网(FANET)相关技术的实验研究提供了可行性。与传统的移动Ad hoc网络一样,目前对于FANET的研究大多基于仿真,移动模型作为仿真实验的重要组成部分,影响着仿真结果的有效性和可靠性,因此一个合格的移动模型应该反映真实情况下的运动特征[2~4]。
为了提高网络仿真的质量,学者们在移动模型领域进行了深入研究,并提出了多种具有针对性的新型移动模型。文献[5]以参考点群组移动模型为基础,提出了双层移动模型,该模型适用于具有双层群组移动特性的场景,与参考点群组移动模型相比,其丢包率和平均延迟更小,链路保持时间更长。文献[6]提出了粒子群移动模型,该模型用简单的计算框架模拟了无人机的群体运动,将无人机运动自身的时间相关性和无人机之间的空间相关性作为度量标准。在文献[7]中,针对无人机协同工作的自组网需求,提出了一种信息素移动模型,但是该模型对网络并不友好,因为信息素使无人机彼此远离,导致节点链路频繁中断。文献[8]受到蚁群算法的启发,提出了一种针对UAV编队飞行的自然驱动的移动模型,该模型利用反信息素来有效地覆盖选定的区域,通过吸引信息素来探测追踪最大数量的目标。Tolety和 Davies[9~10]针对城市街道中行人的移动特征,设计了Gauss-Markov移动模型和城市街道移动模型,该模型中节点的运动速度和方向存在时间相关性。为了模拟商场中工人搬运货物时的运动,Hsien[11]研究了工人搬运货物时的移动特征,提出了一种基于蚁群算法的移动模型,但是该模型没有考虑节点的避障问题,且节点存在急停和急转向的现象。
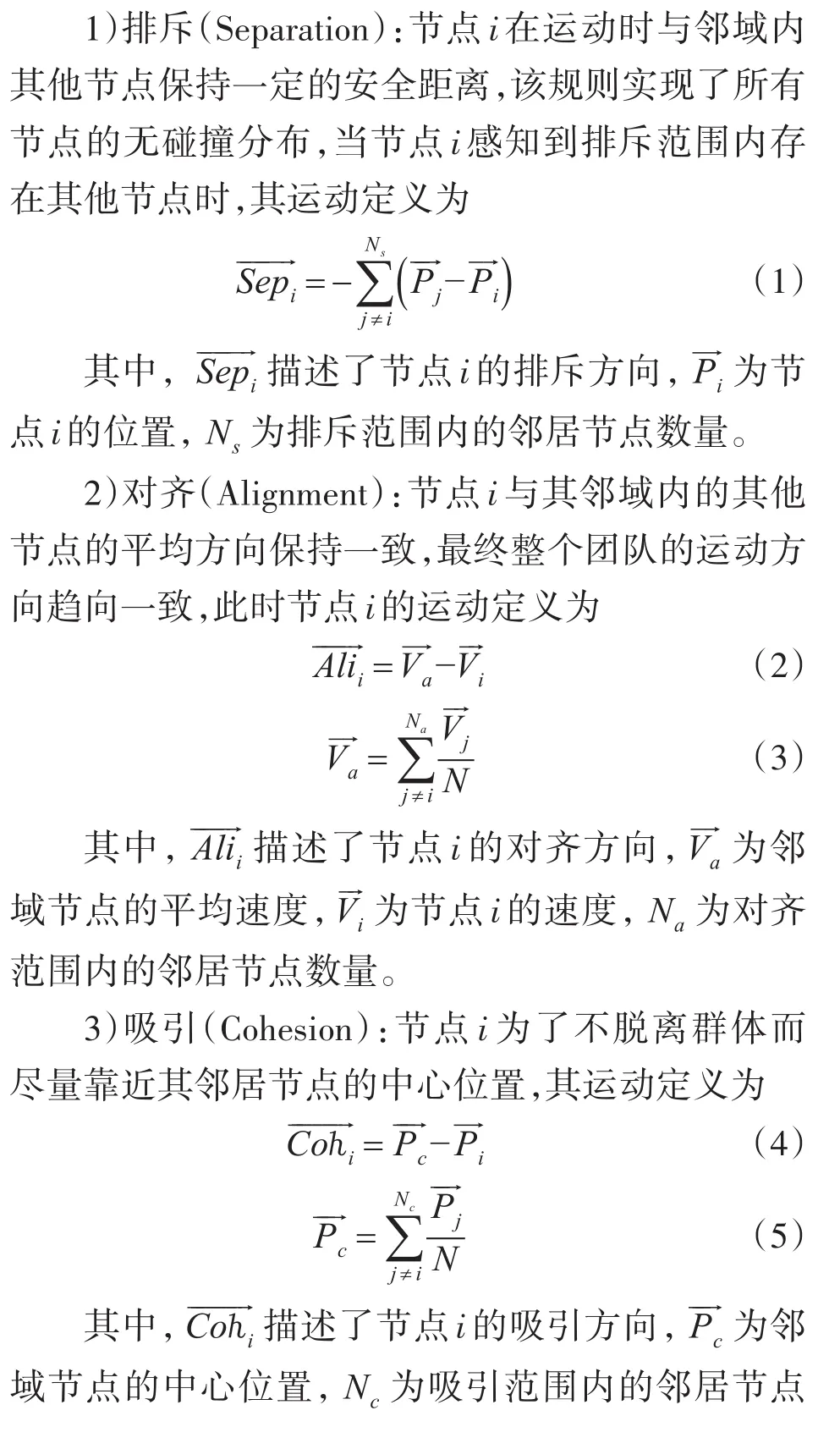
在FANET中,无人机节点并非孤立存在的,它们在运动过程中表现出强烈的群集运动特征,这种运动特征与鸟类的群集运动有着相似之处[12~14],主要体现在[6]:第一,所有节点因共同的目标而相互关联,在飞行过程中应保持合适的编队形态,例如在执行同一任务时,所有节点的运动方向和速率应趋向一致,节点之间不宜相距太远;第二,节点在飞行时应遵循运动学和动力学约束,不能以纯随机的方向和速率运动,不存在急停和急转弯等不符合实际的现象,每个无人机节点的运动轨迹都应是平滑的;第三,节点之间应保持无碰撞分布,且能及时规避外部障碍物。目前所提出的移动模型主要是针对传统的移动Ad hoc网络设计的,其群组运动方式较为单一[15~16],无法在同一种模型中有效模拟出无人机集群的多种运动行为,因此,本文提出了一种基于生物集群智能的移动模型(BSIM),对Boids模型中的SAC规则进行补充和改进,有效模拟了无人机集群的多种运动行为。
2 生物集群运动
2.1 Boids模型
1987年Reynolds首次提出了一种用于模拟自然界中生物群集运动的计算机仿真模型,即Boids模型。Reynolds发现鸟群和鱼群在运动时都遵循三条非常简单的规则,即SAC规则,如图1所示。当SAC规则同时发挥作用时,计算机模拟出的群集运动与实际鸟群运动十分相似[17~19]。图1(a)排斥:个体为了避免碰撞而相互分离。图1(b)对齐:调整个体的方向为邻居范围内个体的方向的平均值。
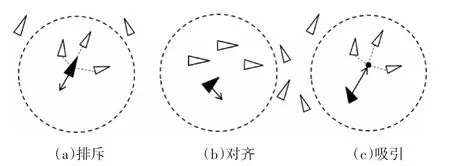
图1 Boids模型原理图
图1(c)吸引:个体移动到邻居范围内个体的中心位置。
2.2 存在的问题
Boids模型是群集运动中的经典模型,虽然具有简单易行的优点,但是如果要仿真FANET中无人机集群的运动,却不是最优的选择。Boids模型只能模拟出最基本的蜂拥行为,无法展示无人机集群的平移、盘旋等行为,并且当节点数量增多时,无人机节点往往分散成多个群组,这与现实场景有所背离。
3 BSIM模型
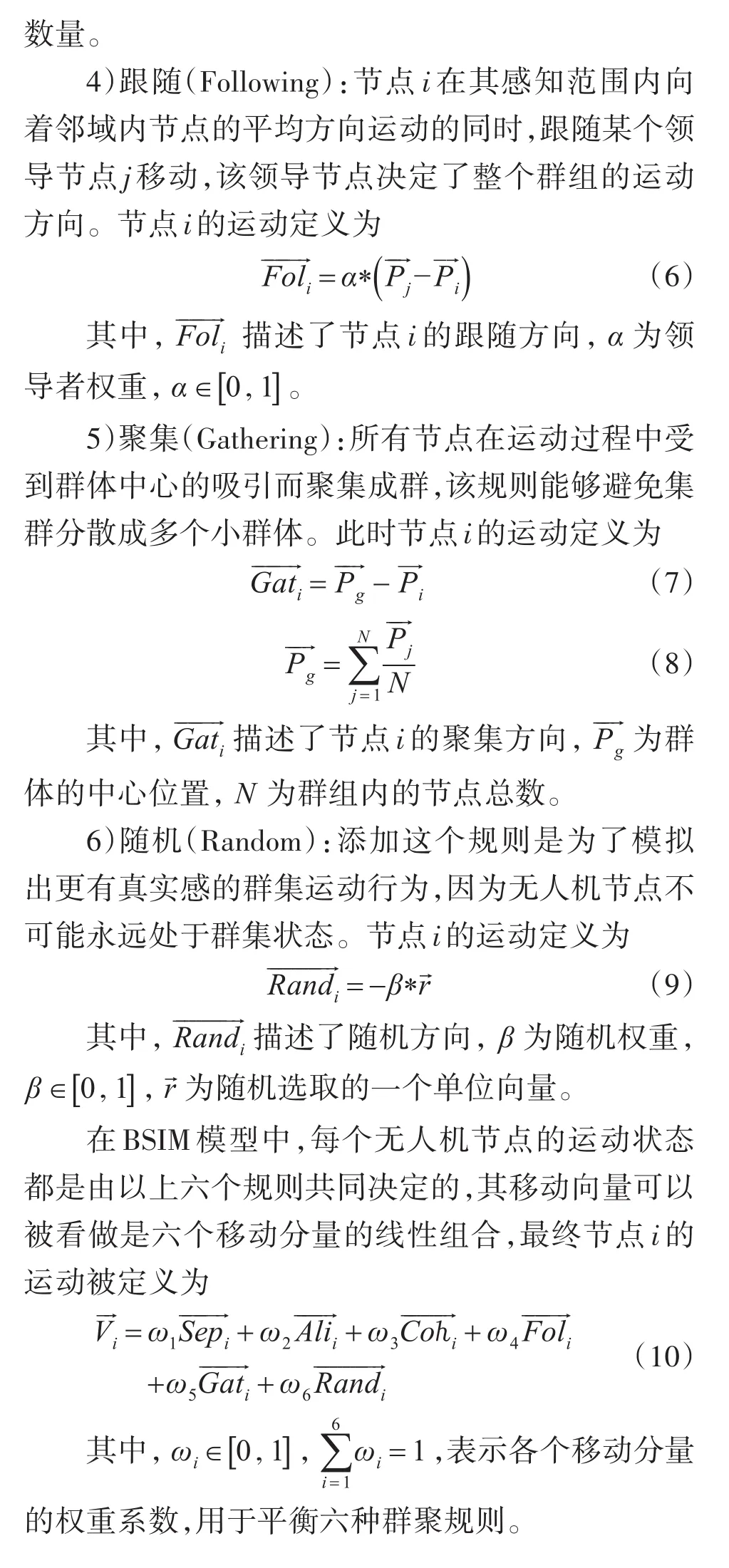
在Boids模型原有SAC规则的基础上,引入三条运动规则,分别为跟随、聚集和随机,每个无人机节点的运动状态由这六条规则共同决定,下面将对这些规则进行详细阐述和公式化描述。
4 仿真
4.1 仿真环境设置
为了验证BSIM模型的运行效果,我们在Matlab上进行了仿真实验,为了简化问题,现做出如下假设。
1)由于无人机相对于仿真区域来说体积很小,为方便处理,将无人机视为空间里的一个质点;
2)假设从仿真开始,所有无人机已经到达了指定的相同高度区域,并且在之后的运动过程中,飞行高度保持一致;
3)所有无人机节点最初随机分布在仿真区域中;
4)仿真区域内不存在障碍物,不考虑环境避障问题;
5)所有无人机以恒定的速度飞行。
仿真参数如表1所示。
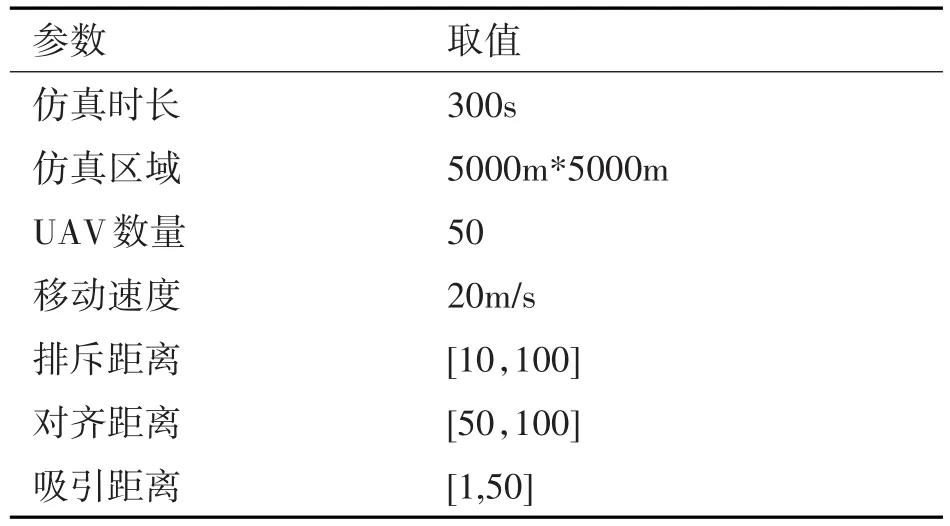
表1 仿真参数设置
4.2 仿真结果
在本次仿真实验中,我们设置了50个无人机节点,由于上述假设中认定所有无人机保持一致的飞行高度,因此可以将所有无人机节点随机分布于5000m*5000m的二维仿真区域,可将其视为空中的俯视图。
式(10)是对无人机节点运动的数学化描述,式中的权重系数ω1、ω2、ω3、ω4、ω5和ω6的取值决定了无人机节点的飞行状态,为了在BSIM模型中模拟出无人机集群的多种运动行为,我们在仿真过程中通过动态修改这些权重系数的值,从而使无人机集群进行不同运动行为之间的切换。经过多次实验,我们发现:1)当ωi的取值依次为0.2、0.2、0.2、0.05、0.3、0.05时,无人机集群表现出聚集行为;2)当ωi的取值依次为 0.4、0.05、0.05、0.05、0.05、0.4时,无人机集群分散,表现出随机行为;3)当ωi的取值依次为0.2、0.2、0.1、0.3、0.15、0.05时,无人机集群整体出现平移行为;4)当ωi的取值依次为0.3、0.05、0.4、0.1、0.1、0.05时,无人机集群出现盘旋行为。
图2展示了无人机节点在仿真的不同时刻的群集状态图。图2(a)展示的是初始时刻所有无人机节点随机分布于仿真区域中,节点之间较为分散;图2(b)为无人机节点彼此相互靠拢,最终聚集成群,在靠近的过程中节点之间保持一定的安全距离;图2(c)为无人机节点聚集后以群组的方式发生平移,平移过程中所有节点的方向和速度趋向一致,平移前后群组的形状总体保持一致;图2(d)中无人机节点呈现出类似于鸟类的盘旋行为,该行为能有效帮助无人机集群在现实场景中躲避攻击。
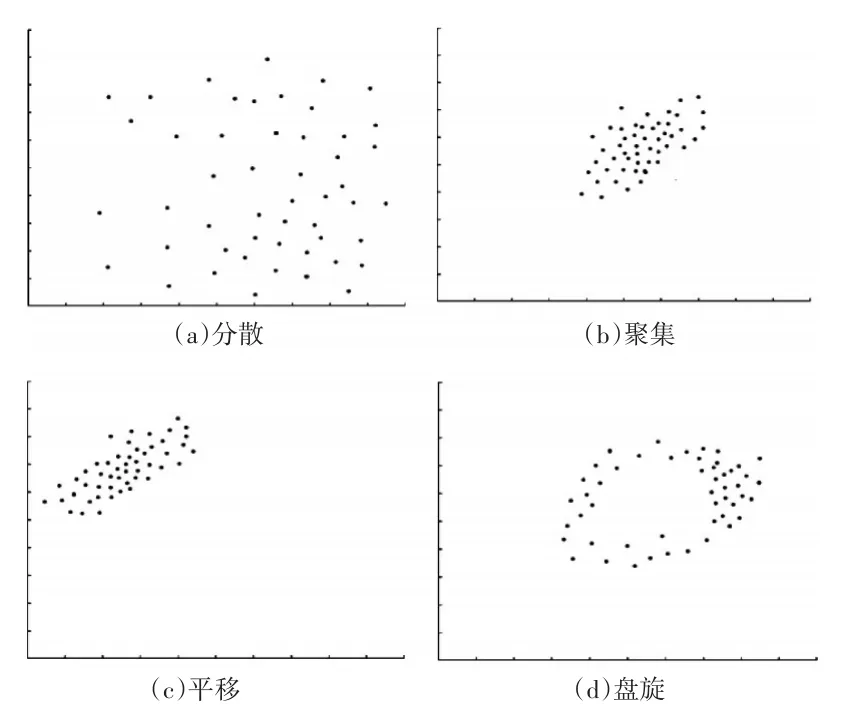
图2 BSIM模型的不同群聚状态图
5 结语
生物集群智能通过具有简单行为机制的个体间的相互协作,从而使群体呈现出复杂的智能行为,个体的行为模式以及个体间的组织结构是其研究的关键。本文针对飞行自组网,提出了一种基于生物集群智能的移动模型,通过对Boids群聚规则进行优化,建立改进后的数学模型,有效模拟了无人机集群的多种运动行为,包括聚集、分散、平移和盘旋,达到了在同一种模型中模拟出不同运动行为的效果,为飞行自组网的路由协议等相关研究提供了可靠、通用的移动模型。
