自保护相依多部件系统的预防维修建模及策略优化
2022-02-08沈静远王春丽
沈静远, 王春丽
(南京理工大学 经济管理学院,江苏 南京 210094)
0 引言
随着人工智能、信息科学等相关技术的发展,系统智能化成为不可逆转的趋势,并且将由可控化、自动化的低级智能阶段转向高级智能阶段,即具有自维护、自适应、自进化等特征[1]。故障的自愈化也是智能化发展高级阶段的重要特点。高金吉[2]对故障自愈原理进行了深度研究,将故障自愈化技术研究主要领域分为自修复技术、代偿技术(含智能切换)、故障自愈调控技术、免疫技术以及自保护技术等。其中,自保护是指当受到环境或工况变化的影响时,系统可以自保护来避免故障或故障。
带有辅助部件的系统也具备自保护性。这类系统通常包含两类部件,一类为主要部件,作用是执行系统功能,这类部件一旦故障,整个系统便会故障。另一类为辅助部件,用于保护主要部件免受环境冲击的影响,这类部件的故障不会导致系统故障。在现实中,这种主辅系统有很多,例如带有减震装置的镗床以及配备阻尼器的精密仪器等[3~5]。国内外学者对这种类型的系统进行了深入研究。例如,Taghipour和Banjevic[6]以及Babishin等[7]。这些学者对主辅系统的研究卓有成效,但他们的模型大都是假设两类部件相互独立的假设,忽略了部件相依的事实。在实际的主辅系统中,主要部件与辅助部件存在相依关系。例如,用于切削钻孔的镗刀通常配置阻尼器作为辅助部件来缓解工作时产生的震动,一旦阻尼器失效,镗刀由于不断受到震动的影响,退化速率加快,从而更易故障。因此,镗刀与阻尼器是退化相依的。而对于主辅系统的部件相依性的研究还十分有限,只有少数学者进行了研究。例如,高文科等[8]和Shen等[9]。这些学者补充了主辅系统部件相依性方面的研究空缺,但他们建立的模型都只包含一个辅助部件,具有一定的局限性。
本文以部件相依的主辅系统为研究对象,基于部件状态检测,提出了一个系统预防维修策略,即(Dc;p,Na;pτ)策略。且利用半再生过程技术推导了系统的长期运行平均成本,并以长期运行平均成本最小化为目标,对所提的预防维修策略进行了优化。本文的创新点主要体现在以下几个方面:第一,考虑了系统包含多个辅助部件的情况;第二,充分研究了部件相依性对系统的影响;第三,将辅助部件失效个数作为决策变量,提出了一个新的预防维修策略。
1 系统描述与模型假设
假设系统由一个主要部件和n个辅助部件组成。一旦主要部件故障,则系统故障;辅助部件的故障不会直接导致系统故障但会加速主要部件的退化。系统在运行过程中受到环境中随机冲击的影响,假设冲击到达服从强度为λ的齐次的泊松过程{N(t),t≥0},其中N(t)表示在[0,t]内冲击发生的次数。辅助部件的作用是保护主要部件免受环境冲击的影响。令随机变量Xij(i=1,2,…,j=1,2,…,n)表示第j个辅助部件受到的第i次随机冲击导致的损伤大小,当某一次冲击的损伤超过某个辅助部件预先设定的故障阈值时,则认为该辅助部件故障。假设所有辅助部件的故障阈值均为Da,则第j个辅助部件受到第i次冲击故障的概率Pa;j可以表示为Pa;j={Xij≥Da}。特别地,假设随机变量{Xij,i=1,2,…,j=1,2,…,n}是独立同分布的,可得Pa;1=Pa;2,…,Pa;n。在这种情况下,为方便起见,我们用Pa=Pa;j表示任意一个辅助部件受到随机冲击而故障的概率。
主要部件的性能在运行过程中随时间不断退化,辅助部件在一定程度上隔离和减轻了环境冲击对主要部件的影响。但当辅助部件故障后,随机冲击对主要部件退化过程的影响就无法避免了。为了刻画这一现象,本文假设主要部件的平均退化速率随辅助部件故障数量的增加而增加。用αk(k=0,1,…,n)表示系统中有k个辅助部件故障时主要部件的平均退化速率,并且满足αn≥αn-1≥…≥α0。主要部件的退化量随时间不断累积,我们用Dc(t)表示主要部件在t时刻的累积退化量。当主要部件的累积退化量超过给定的退化阈值Dc;f时,即当Dc(t)≥Dc;f时,则认为主要部件故障。
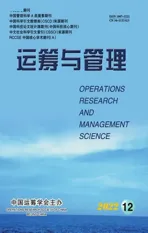
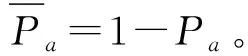
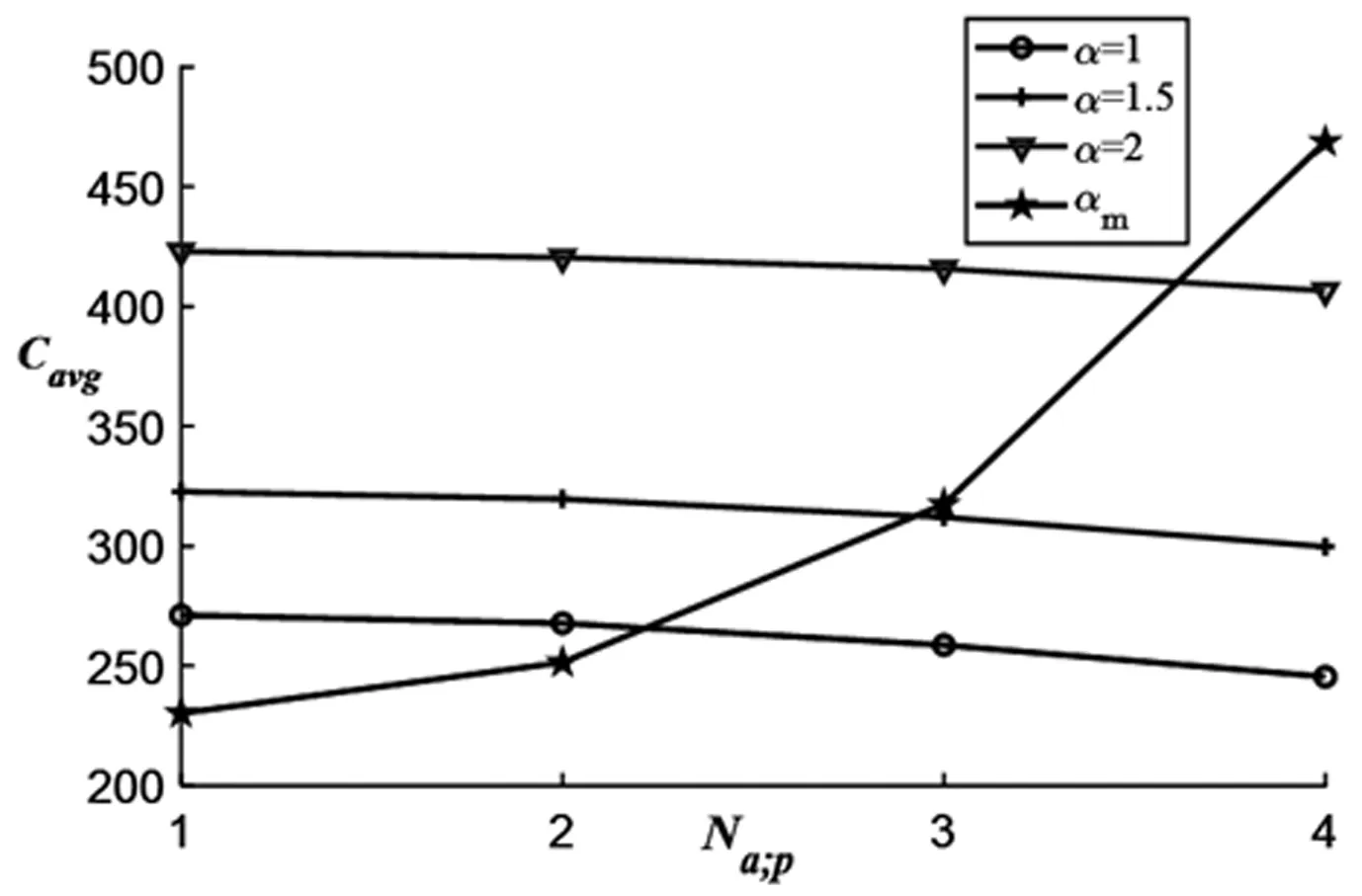
在这个系统中,主要部件的故障会使整个系统故障,所以这一类故障是自显的。相反,辅助部件的故障是隐性的。因此,每隔τ时间对系统进行定期检测,假设检测完美且时间可忽略不计。每次检测可以确定故障的辅助部件数量以及主要部件的退化水平。令Na(t)和Dc(t)分别表示t时刻辅助部件的故障数量和主要部件的累积退化水平,则可以根据Na(t)和Dc(t)的值来制定相应的维修策略。在任一检测时刻,若检测到故障的辅助部件数量超过或等于给定的预防性维修阈值Na;p,则直接更换掉所有的故障辅助部件,否则不对辅助部件进行任何操作。对于主要部件,当检测到主要部件的退化水平满足Dc;p≤Dc(t) 图1 n=4且Na;p=3时,系统状态变化的一个可能的样本路径 用随机变量Tc;p和Tc;f分别代表主要部件预防维修和事后维修的时间,用Cc;p和Cc;f表示相应的成本。考虑到经济性,假设预防维修的时间和成本分别小于事后维修的时间和成本。此外,每个辅助部件的更换时间Ta和Ca成本分别用Ci和Cd表示。和为一次检查的成本和单位停机成本。基于所提出的检测维修策略,我们的主要研究目的之一是推导出该策略下的长期运行平均成本。并以长期运行平均成本最小化为目标,将检测周期τ、预防维修阈值Dc;p和Na;p作为决策变量,建立优化问题,进行维修策略优化,通过计算给出最优解或可行解。 在本文中,我们用半再生过程[10]来描述系统的运行过程。半再生过程是再生过程的一种推广。半再生过程允许过程存在多类“再生”时刻,过程从同一类“再生”时刻出发服从同样的概率分布律。由于过程从不同类型的“再生”时刻出发可能遵循不同的分布规律,因此对于半再生过程而言,这些“再生”时刻称为半再生点。任意两个相邻的半再生点之间的距离称为一个半再生周期。在半再生过程中,系统在某一个半再生点之后的状态只依赖于在该半再生点时系统的状态,与半再生点前系统的状态无关。令{Sk,k=1,2,…}表示从半再生过程{Z(t),t≥0}中选取的半再生点的集合,zk表示时刻sk的系统状态,则{zk,k=0,1,…}可以看作是过程{z(t),t≥0}嵌入的马尔可夫链。根据相关定理[10],如果{Zk,k=0,1,…}存在平稳分布,则系统的长期运行平均成本可以由一个半再生周期内的期望成本除以期望时间得到,即 (1) 其中,π为{Zk,k=0,1,…}的平稳分布,Eπ[C(Sk+1-Sk)]和Eπ[Sk+1-Sk]分别是在π分布下的半再生周期(Sk,Sk+1]内的期望成本和期望时间。进一步,用V(t)表示在t时刻系统距离下一次检测的时间。我们用一个三维向量来表示系统在t时刻的状态,即Z(t)=(Dc(t),Na(sk),V(t))。那么,{Z(t),t≥0}可以看作是一个半再生过程,选取的半再生点为:(a)系统至少一个部件故障的时刻;(b)检测开始的时刻;(c)检测和维修(如果需要)结束的时刻。令Zk=(Dc(Sk),Na(Sk),V(Sk))表示系统在半再生点Sk时的状态,则{Zk,k=0,1,…}为过程{Zk(t),t≥0}嵌入的马尔可夫链。 根据Asmussen[10]的理论,如果马尔可夫链{Zk,k=0,1,…}是Harris遍历的,那么一定存在稳态分布π。为了说明{Zk,k=0,1,…}的Harris遍历性,下面提出定理1。 定理1对于第1节中提出的具有多个辅助部件的自保护系统,用于刻画系统演化过程{Z(t),t≥0}的半再生过程的嵌入马尔可夫链{Zk,k=0,1,…}是Harris遍历的,相应的平稳分布存在。 马尔可夫链{Zk,k=0,1,…}存在平稳分布π,则系统长期运行平均成本可以通过公式(1)得到。接下来,我们的主要关注点是推导出π、Eπ[C(Sk+1-Sk)]和Eπ[Sk+1-Sk]的计算公式。 令(w,m,v)为系统状态(Dc(t),Na(t),V(t))的实现值,其中w∈[0,Dc;f],m=0,1,…,n,v∈[0,τ]。令状态(w,m,v)的平稳概率密度用π(w,m,v)表示,则有 (2) 为了推导π(w,m,v)的值,我们进一步研究一个半再生周期(Sk,Sk+1]内系统的状态变化。根据Sk+1时刻半再生点的类型,分成以下3种情形进行讨论。 情形1在时刻Sk+1至少有一个部件故障 在此情形中,故障的部件可能是主要部件、辅助部件或者两者都有。因此又存在两种场景。 场景a:仅有辅助部件故障 这意味着(Sk,Sk+1)内没有发生冲击或发生的冲击未对辅助部件造成伤害。并且,恰巧冲击发生在Sk+1时刻并导致至少一个辅助部件故障。假设系统在Sk+1时刻的状态为(w1,m1,v1),其中0 (3) 场景b:时刻故障的部件是主要部件或包含主要部件 在该场景下,记Sk+1时刻系统的状态为(Dc;f,m1,v1),其中m1≥0并且0≤v1<τ,则我们可以得到 (4) 情形2在时刻Sk+1开始进行检测 这个情形表示在(Sk,Sk+1)内没有部件故障。系统在Sk+1的状态为(w1,m1,0),其中0 (5) 情形3时刻Sk+1检测完成或维修完成(如果需要维修) 这意味着一次新的检测周期在时刻Sk+1后开始。基于提出的维修策略,可得 π(w1,m1,τ)=π(w1,m1,0),0 (6) (7) (8) (9) 其中,公式(9)最后两个加数分别表示维修前辅助部件故障个数为0的情况。除了在公式(6)~(9)中讨论的情况外,还有w1≥Dc;p或m1≥Na;p时,π(w1,k1,τ)=0的情况。公式(3)~(9)给出了半再生周期(Sk,Sk+1]内系统状态转移的公式。结合公式(2)则可以计算出马尔可夫链{Zk,k=0,1,…}的平稳分布π。由于{Zk,k=0,1,…}的状态是连续的,因此很难直接求出π。要解决这个问题,可以将连续的状态空间离散成有限的状态空间,利用逐次逼近法进行简化计算。 在这部分,将基于平稳状态分布π计算在半再生周期(Sk,Sk+1]内的期望成本和期望时间。基于2.1中求得的π(w,m,v)的值,Eπ[C(Sk+1-Sk)]和Eπ[Sk+1-Sk]可以进一步通过下列式子得到 (10) (11) 其中,E(w,m,v)[C(Sk+1-Sk)])和E(w,m,v)[Sk+1-Sk]分别表示Sk时刻系统状态为(w,m,v)(w∈[0,Dc;f],m=0,1,…,n,v∈[0,τ])条件下,(Sk,Sk+1]内的期望成本和期望时间。 假设系统在Sk时刻的状态为(Dc;f,m,v)(其中v∈[0,τ]),即Sk时刻至少主要部件故障。则立即进行事后维修,同时对辅助部件进行机会检测和更换(如果需要)。在这种情形下,维修结束时刻可以看作是下一个半再生时刻Sk+1。根据辅助部件故障的个数,我们可以得到 (12) (13) 另外,假设系统在Sk时刻的状态为(w,m,0),即在Sk时刻开始进行检测。基于第1节提出的策略, (14) (15) 最后,假设系统在Sk时刻的状态为(w,m,v),其中0≤w E(w,m,v)[C(Sk+1-Sk)]=0,若w (16) 若αmv (17) 若αmv≥Dc;f-w,即系统在下一次检测到来前发生故障,令c=(Dc;f-w)/αm,则有 (18) 将等式(12)、(14)和(16)带入(10)中,结合2.1中推导出的π可得到期望成本Eπ[C(Sk+1-Sk)]。类似地,通过将等式(13)、(15)、(17)和(18)带入(11)中,即可得到期望周期Eπ[Sk+1-Sk]。最后,长期运行平均成本可由等式(1)得到。 在本章中,我们考虑一个具有四个阻尼器作为辅助部件的镗刀系统,假设整个系统遭受的环境冲击是服从强度为λ=2/天的齐次泊松过程。每次冲击导致一个阻尼器故障的概率为Pa=0.3。镗刀为这个系统的主要部件,受到阻尼器的保护并随时间不断退化。平均退化速率与系统中工作的阻尼器的数量有关。假设α0=0.5,α1=1,α2=2,α3=4,α4=5。其中,αm(m=0,1,…,4)是当系统中故障的阻尼器数量为m时镗刀的期望退化速率。当镗刀的累积退化量超过预先设定的故障阈值Dc;f=10时,则认定其故障。由于镗刀故障就会立即停机,因此故障是自显的。 基于本文的系统,我们考虑定期检测和预防更换策略。假设检测间隔为τ=0.5天。每次检测的成本为Ci=10元,检测时间忽略不计。在每次检测中,如果故障的阻尼器个数不少于Na;p=2,则所有故障的阻尼器将被更换。更换一个阻尼器花费的时间服从参数为Ua=10/天的指数分布。每个阻尼器的更换成本为Ca=50元。如果检测发现镗刀的累积退化量超过预防更换阈值Dc;p=8,即使镗刀仍正常工作,我们也对其进行预防更换,成本为Cc;p=1500元。此外,若镗刀在两次检测之间故障,将以成本为Cc;p=3000元被事后更换。每次预防更换和事后更换花费的时间是分别服从参数为uc;p=4/天和uc;f=1/天的指数分布。整个系统在维修期间停机不运行,单位停机成本为cd=50元/天。 系统的状态变化在本文中用半再生过程建模。系统的长期运行平均成本通过第2节中的方法求得,为Cavg=251.46元。很显然,当给定的参数变化时,系统的长期运行平均成本也会相应改变。图2给出了Cavg随不同Dc;p,Nc;p,τ而变化的三维图。第一张图展现了Cavg随τ和Dc;p的变化规律,可以看出,当Dc;p或τ固定时,Cavg都随另一个变量的增大呈先下降后上升的趋势;第二张图体现了Cavg随τ和Na;p的变化规律;第三张图呈现的是Cavg随Dc;p和Na;p的变化情况。 图2 Cavg随Dc,p,Na,p,τ中两个参数变化的三维图 将Dc,p,Na,p和τ作为决策变量,优化问题可以建立为以长期运行平均成本最小化为目标优化预防维修阈值和检测周期,即 (19) 为了体现主要部件与辅助部件之间的相依关系的影响,下面我们将不考虑相依性得到的成本与考虑这种相依性的结果做对比。若不考虑主辅部件之间的相依关系,则主要部件退化率α为一固定的数值,我们分别取α为1,1.5和2,同时保持其他参数与上述参数相同,画出系统长期运行单位成本随辅助部件预防维修阈值Na;p变化的三条曲线并与考虑相依情形下的系统长期运行单位成本变化曲线作比较。从图3可以看出辅助部件与主要部件不相依时,主要部件的退化率越高,长期运行单位成本也越高并且系统长期运行单位成本随着Na;p的增加而下降。而在辅助部件与主要部件相依情况下,这种趋势则完全相反。产生这种不同结果的原因是,在部件不相依的情况下,即使设定的辅助部件预防更换阈值很小,也不会减缓主要部件的退化,反而使得辅助部件预防更换更加频繁,产生较高的辅助部件更换成本和停机成本。而在部件相依的情况下,当辅助部件预防更换阈值设置较高时,主要部件以高退化率退化的时间占比也越高,主要部件更容易达到预防更换阈值以及故障阈值,从而产生较高的主要部件维修成本,故Cavg随Na;p的增大而增大。 图3 不同主要部件退化率下取不同值时的变化 本文研究了一个自保护系统,系统包含的多个辅助部件能够在环境冲击到来时,通过牺牲自己来保护主要部件不受环境冲击的影响,避免主要部件突发故障。此外,本文充分考虑两类部件之间的相依关系,即当辅助部件故障时,主要部件的退化率不断提高。对于这样的多部件系统,我们提出了一个计算系统长期运行平均成本的半再生过程方法和基于检测的预防维修策略(Dc;p,Na;p,τ)。我们从研究中得到出了以下结论:(1)半再生过程技术对处理状态变化复杂的过程有良好的效果。(2)主要部件与辅助部件之间的相依关系会对系统运行及成本产生较大影响。本文通过研究具有辅助部件的系统,扩展了自保护系统的内涵,补充了部件相依性的研究,所提的预防维修策略对实际工程中的维修决策具有一定的指导意义。
2 系统长期运行平均成本
2.1 {Zk,k=0,1,…}的平稳分布




2.2 一个半再生周期内的期望成本和期望时间:Eπ[C(Sk+1-Sk)]和Eπ[Sk+1-Sk]


3 数值研究
4 结论