基于系统集成及避碰技术的船舶智能化
2022-02-03富玲峰
徐 浩,富玲峰
(中电科(宁波)海洋电子研究院有限公司,浙江 嘉兴 314000)
0 引言
智能船舶是目前船舶新技术研究的一个热点,近几年获得了极大的关注。中国船级社(CCS)在2015年12月1日发布了《智能船舶规范》,从智能航行、智能机舱、智能船体、智能能效管理、智能货物管理和智能集成平台6个方面对智能船舶能要求进行了规范,旨在引领船舶和配套技术的发展[1]。
本文主要研究智能船舶的智能航行领域,目前国内外在这方面的研究主要集中在航线优化与设计和自主航行这两方面[2],很多航行控制算法和产品已经在小型无人艇上进行使用和试验,但都作为单独的无人艇个体进行研究,在商用船舶和营运船舶领域目前仍在积极研究中。而关于智能航行的研究都集中在海船和江船,在内河智能船舶方面也仅限于船舶位置监视、危化品过境监控及过闸控制等方面,没有涉及船舶智能航行、船岸一体化调度、综合业务管理等领域。
1 集成系统组成
智能船舶系统中,一方面借助船舶通导设备、环境感知设备等如航行/姿态检测、AIS、RFID、CCTV、北斗卫星、导航雷达等技术手段,形成多方位立体化的航运要素信息感知体系,实现船舶对助航设施、碍航物等航行环境的智能感知;另一方面,依靠先进的船岸一体化通信技术和数据交换技术等,实现监管单位对智能船舶的远程监控、调度及指挥。智能船舶系统架构如图1所示。
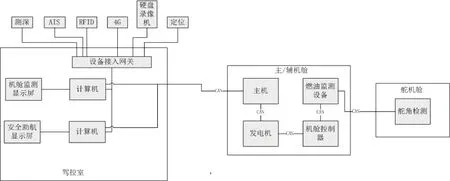
图1 智能船舶系统总体架构
智能船舶系统通过公网4G,AIS,VHF等通信手段接入海河联运项目的通信网络,与综合信息平台进行高速数据交互。智能船舶的通信手段及与系统的关系如图2所示。

图2 智能船舶通信系统
2 工作原理
智能船舶系统利用计算机技术、控制技术等对感知和获得的信息进行分析和处理,将原先由人工实现的环境感知、事态认知和决策执行等环节通过信息化系统进行替代,具体如图3所示。利用信息化系统实现对船舶航行进行实时监管和安全预警,实现航行过程中的避障预警,实现岸基一体化的数据交互,最终实现船舶在宽广水域的自动航行。

图3 智能船舶系统工作原理
智能船舶系统中的信息系统是指架设在船上的数据处理中心。其中,信息化显控终端承担信号汇集、分析、处理、显示、人机交互及对内外通信的任务;感知空间是借助船载的通导系统和机舱监控系统,实现船舶状态及周边环境状态的感知;认知空间是对感知数据进行综合分析和处理,评估航行过程中潜在的各种效率、风险及危险,为保障航行安全和提高能效提供支撑依据;决策执行是根据认知的结果做出合理判断;决策的目标是保障航行安全、提高航行效率。
3 避碰技术及DCPA原理
避碰技术的核心在于障碍物的探测与识别技术。对周边环境进行检测、识别障碍物,预测距离、运动方向和速度,判断船舶与其它空间物体之间的距离是否已经构成碰撞危险。根据安全规避策略控制船舶进行路径调整,针对运动目标需要,进行动态跟踪及运动轨迹预测;针对多障碍目标的感知,选择路径调整及避碰策略。对于船舶来说,还要将识别目标信息与电子航道信息、动力信息、线路信息进行综合处理,形成避碰决策[3]。
最近会遇距离(DCPA)表示两船或船与障碍物在会遇过程中最近时的距离,是衡量两船是否发生碰撞可能的重要标准。到达最近会遇距离处的时间(TCPA),表示两船或船与障碍物在会遇过程中的时间概念。若DCPA=0,说明若船只保持航向和航速不变,本船将与他船或障碍物同时达到某一点,必然发生碰撞危险;若DCPA>0,说明本船尚有一定的通过距离,但能否安全通过,取决于当时的环境和具体情况。当DCPA=0或DCPA小于安全距离的情况下,TCPA越小,表明船舶到达最近会遇距离处的时间越短,碰撞的危险程度越大;反之,TCPA越大,表明船舶到达最近会遇距离处的时间较长,碰撞的危险程度相对较小。
如果障碍物罗经方位有所变化,但变化幅度不大,虽然DCPA≠0,但不能确定在安全距离以外通过,需要了解障碍物方位变化和距离变化之间的关系,以便确定会遇的DCPA值。
如图4所示,设本船位于O点,AC为障碍物相对本船的运动线。当障碍物从距本船距离为D1的B处运动到距离为D2的A处时,障碍物与本船航向偏差为α1,此时最近会遇距离DCPA=d。因此,可推导得到:
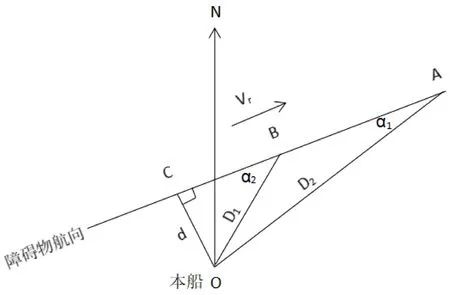
图4 方位变化与距离变化的关系
DCPA=D2Sinα1
TCPA=D2Cosα1/Vr
其中,α1和α2是障碍物航向与本船航向的夹角(范围为0~180°);Vr是障碍物相对于本船的运动速度。通过分析可知,同一路径前提下D越大,对应的α就越小,DCPA也会越来越小,但TCPA会遇的时间会越长。因此,可以判断是否存在碰撞危险,从而实现了避碰的要求。
4 结语
本文详细介绍了一种可实用于智能船舶的系统集成方法,可以降低开发成本并缩短开发时间,能保证整个系统的稳定性。同时,详细介绍了DPCA的避碰技术,通过采集船舶与障碍物相对于船舶的运动路线的距离,以推导的公式计算出相应的数据,把计算出的数据和给定的表格进行比对,就能够得出船舶碰撞的危险级别,当比较危险时,就需要调整船舵及船舶航速。
