电动飞机近海面飞行气动特性分析
2022-02-01赵伟鹏张英浩
赵伟鹏,张英浩,高 婷,梅 凯
(1.沈阳航空航天大学,辽宁 沈阳 110136;2.武汉第二船舶设计研究所,湖北 武汉 430205)
我国是一个海洋资源极其丰富的国家,据统计,截至2015年,全国海岸线总长为18 604.3 km,其中人工岸线总长为12 747.8 km,自然岸线总长5 856.5 km[1]。绵长的海岸线为属地经济的发展和海洋资源的开发提供了更多机会,但同时海洋活动的越发频繁和国家之间对海洋权益竞争的日趋激烈,都对海上侦查巡逻和应急救援工作提出了更高的难度和挑战。随着飞机设计与建造技术的不断进步,飞机的应用需求越来越明确化,飞机的功能分类越来越多样化,对设计和建造的要求也越来越精细。因此出现了电动飞机、地效飞机、水陆两栖飞机和舰载机等一批专门针对水气两相界面应用需求的特种飞机。这些飞机凭借着高效和快速的优势在海上巡航飞行、海上应急救援和森林防火等方面扮演着相当重要的角色。除了满足国家需求外,随着人们物质生活水平的提高,飞机也作为一项重要工具而被广泛应用于体育运动、旅游观光和海上运输等诸多民用领域。但不管是面对日益繁杂的海上巡防任务,还是确保有关民用航空上下游产业的有序发展,都对飞机近海面飞行的安全提出了更高的要求,因此迫切需要探究飞机近水面飞行气动特性。飞机近海面高速飞行过程,既受水面效应影响[2-3],又同时包含了气体、液体、刚性固体三者的高速剧烈作用,因此总是处于一个非线性强、耦合特性强的复杂环境中。在近海面飞行过程中飞机状态稍有偏差,强大的水动载荷极有可能对浮筒连接杆、机翼和发动机等重要构件造成结构性破坏,从而使飞机的漂浮特性进一步变差,且由于海上救援难度偏大,所以近海面飞行的事故率和事故严重程度都要远远高于常规飞行阶段。作为近海面飞行的代表——舰载机,美国海军发生的舰载机事故中有80%是发生在近海面的着舰过程中,BROOKS C J等[4-5]对1979—2006年发生在加拿大和1981—2011年发生在美国的直升机水面坠机事故进行了详细的调查和分析后发现其死亡率分别高达23%和26%,因此很多学者对飞机的近海面飞行展开研究。米百刚等[6]基于非结构动态网格重构技术,对NACA0012二维翼型自由空间、近地效应,以及近水面效应的非定常运动流场进行了数值计算分析。韩龙等[7]使用滑动网格法对三维等直翼NACA0015在波浪条件下的水面效应进行了数值模拟与分析。段旭鹏等[8]模拟过程全面考虑了飞机高速滑行时的水动力、气动力、水面效应和螺旋桨的动力影响。SCHWEIKHARD Y S等[9]采用离散涡模型计算了二维机翼的动态地面效应;BARBER T J[10]提出水面上发生的任何变形很可能是由翼尖涡旋引起的,而不是机翼下方压力分布增加引起的;MORYOSSEF Y等[11]在假设无粘和有粘流体的情况下,对地面效应中的振荡翼型进行了数值模拟。IM Y H等[12]使用基于LU因子分解算法和高阶逆风方案的欧拉代码,对波浪表面上的二维翼型进行了数值模拟。
现有研究多以地效飞机或大型水陆两栖飞机为研究对象,对轻型电动飞机的近海面飞行性能研究鲜少。然而,受设计布局、飞行性质等因素的影响,飞机受到的自由液面影响也会有所不同。电动飞机具有体积小,载重量少,操作灵活、起飞和降落对水域要求较低等特点,相较于地效飞机和水陆两栖飞机,它的机翼面积较小,体量较轻,因此难以测量其在近水面飞行时受到的水面效应影响程度,且本身稳定裕度小,所以升力和阻力更易受到外界条件的干扰。本文研究的电动飞机具有自升式滑翔飞行能力,满足的机动能力包括:正常飞行的机动;缓“8”字,急上升,转弯;坡度不大于60°的急转弯和失速。目前以该型飞机为基础已进一步设计研发了水上飞机[13]。因此,考虑该飞机的结构特点,研究飞机的近海面飞行特性势在必行,既可以为飞行员的训练提供必要的理论支撑,也可以为其他相关类型飞机的设计提供参考。
此外,现有研究视角多置于二维、三维机翼。飞机迎角不同、距水面高度不同和海况不同时,其受到的自由液面影响也有很大的不同,但从前人研究成果来看,还缺乏对这些方面的综合对比。本文基于STAR-CCM+软件,采用欧拉多相流模型和VOF法,该方法是一种建立在欧拉网格下的界面捕捉方法。对某型电动飞机贴近海面飞行时的非定常动态运动流场进行数值模拟研究,对表征水面效应的指标——升力系数、阻力系数进行可靠计算,分析不同迎角、不同离水高度和不同海况下水面效应的影响,以期能对水上飞机设计和飞机近海面飞行性能分析等提供参考。
1 数值方法
1.1 控制方程和湍流模型
以雷诺平均方程作为求解电动飞机近海面飞行的基本方程,其具体形式如下。

式中,ρ为流体密度;μ为流体粘度;p为静压;fi为单位质量的质量力;ui和uj为速度分量。
湍流模型选取可实现的K-Epsilon两层模型[14],它是低雷诺数方法的替代方法,可以将K-Epsilon模型应用于粘性影响层(包括粘性子层和缓冲层)。在壁面旁边的层中,湍流耗散率ε和湍流粘度μ均被指定为壁面距离的函数。系统将对整个流体域的湍动能方程进行求解,下面给出该模型的数学表达式[15-17]。
式中,v代表速度;μ代表动态粘度;σk、σε、Ct、Cε1和Cε2都代表模型系数;Pk和pε分别代表两种不同的K-Epsilon湍流模型变体式;Sk、Sε代表用户自定义源项;ε0是源项中用于抵消湍流衰减的环境湍流值;f2代表相应变体式的阻尼函数。
1.2 VOF多相模型及VOF波建模
本文选用两相流液面模拟方法是界面捕捉法——VOF法,通过定义函数来区分不同的流体介质,进而精准捕捉空气—水交界面。界面捕捉法相较于界面追踪法的优势在于易于实现、二次编程难度低和结果准确度高。VOF多相模型[18-19]是一种简单的多相模型,适用于模拟数值网格(能够求解混合物的相之间的交界面)上的多个不混溶流体流,此模型捕捉自由液面的思想如下:每一个计算网格单元中的水的体积分数为α。位于水、气交界面处的网格单元既含有气体又含有水,因此0<α<1;液面以上的网格单元都是气体,因此α=0;位于交界面以下的网格都是水,因此α=1。
VOF波模型用于模拟轻流体(空气)和重流体(水)之间的交界面上的表面重力波。海浪等级主要由有效波波高和1/10大波波高两个参数来界定,参照我国对海浪等级的划分标准,以及考虑到轻型电动飞机实际飞行情况,本研究主要模拟两种海况:波高为0 m的平静海面和波高为0.2 m的小浪海面。其中波浪水面使用斯托克斯波理论[20-21]对波浪建模,此波仿真精确度更高,能更接近海面真实波浪。其中波形和波相速度取决于水深、波高和水流,厄塞尔数定义如下。

式中,H为波高;λ为波长;d为水深。
2 气动特性分析方法及其验证
在对电动飞机近海面高速飞行进行数值模拟前,应首先对本文所用的气动特性分析方法进行验证,因飞行过程并不触水且受到实验设备条件的限制,无法通过水池实验对气动特性进行准确计算。因此本文以某型电动飞机为例,分别模拟飞机以不同迎角在空气中平飞时的情况,将升力系数、阻力系数和升阻比与风洞实验数据对比,验证本文数值方法的准确性。
2.1 计算模型
某型电动飞机[22]采用大展弦比上单翼、低平尾、前置螺旋桨、前三点式不可收放起落架布局,几何模型(半模)如图1所示,飞机的设计参数如表1所示。
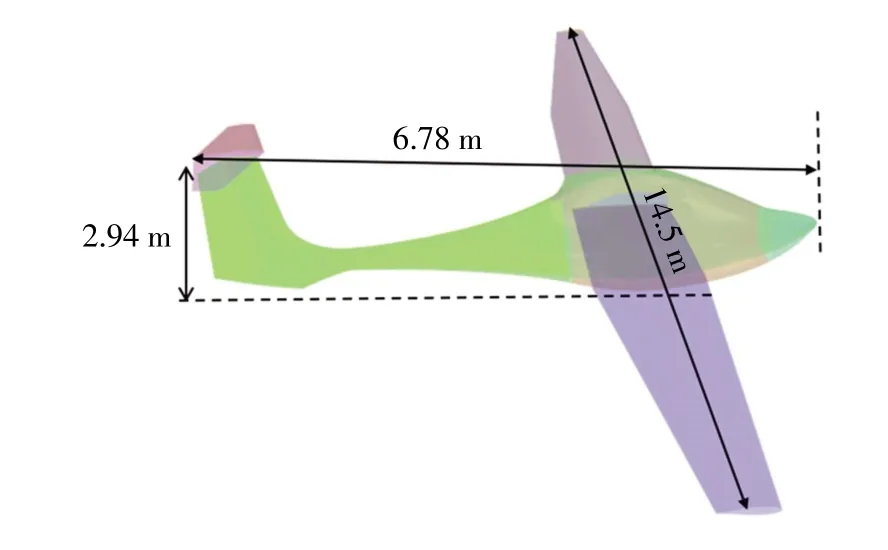
图1 电动飞机模型

表1 某型电动飞机设计参数
2.2 计算域及网格划分
为节约计算资源,缩短研究周期,且模型具有对称性特点,本文仅对一半的几何进行建模(图2),计算域的范围为6.5 L×1.5 L×5.0 L,其中L为机身长度,边界条件设置如下:机头前1.5倍机身长度,设置边界条件为速度入口;机尾后4倍机身长度,设置边界条件为压力出口,压力初始值为大气压力;计算域的上、下边界设置为速度入口,计算域、左右边界设置为对称面;飞机表面定义为无滑移、不可穿透边界条件,边界条件设置为无滑移壁面。
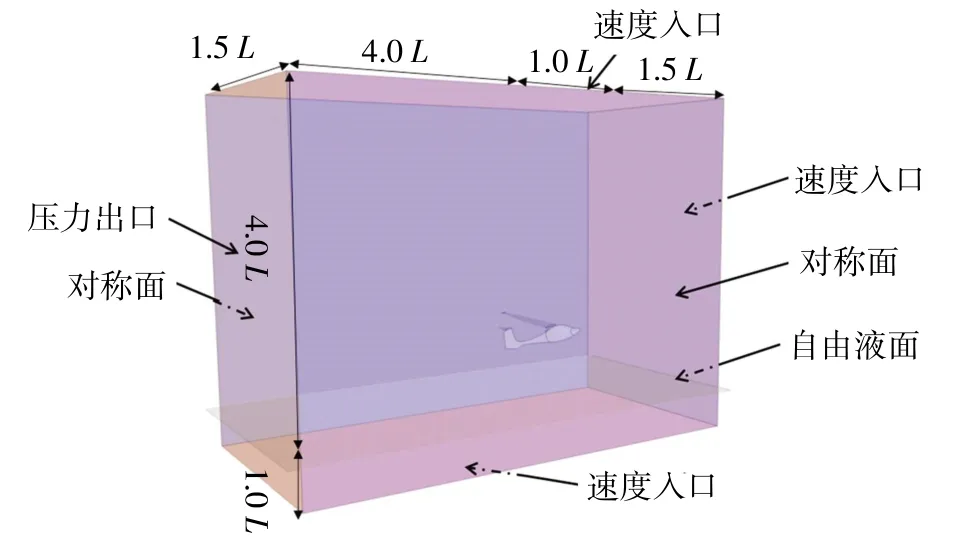
图2 计算域大小及边界条件设置
结构化网格是计算流体力学数值模拟中比较常见的网格划分形式,具有简单易生成、网格质量高和占用计算资源少的优点,它的缺点也显而易见,就是在划分复杂几何模型的时变形较大,不能精确贴合复杂构型,从而降低计算结果准确性。切割六面体网格[23-24]以兼具结构化网格优点同时又能保证对复杂表面精确贴合的独特优势,在近几年得到了广泛发展。为既能减少生成的网格数量又能兼顾计算精度,本文使用切割体、棱柱层网格生成器创建体网格,计算中采用全y+处理边界层。飞机表面边界层厚度定义为0.75 mm以满足壁面函数要求,网格增长因子的数值定义为1.3,设置棱柱层的层数为8。切割六面体网格生成前,一方面对机头、机翼、方向舵和升降舵等重点部位附近进行网格加密,另一方面对水表面附近的网格进行Z轴方向垂向加密,以保证VOF能准确捕捉到自由液面的变化。划分的网格如图3所示,图4为y+值分布图。

图3 飞机机体及加密部件网格展示
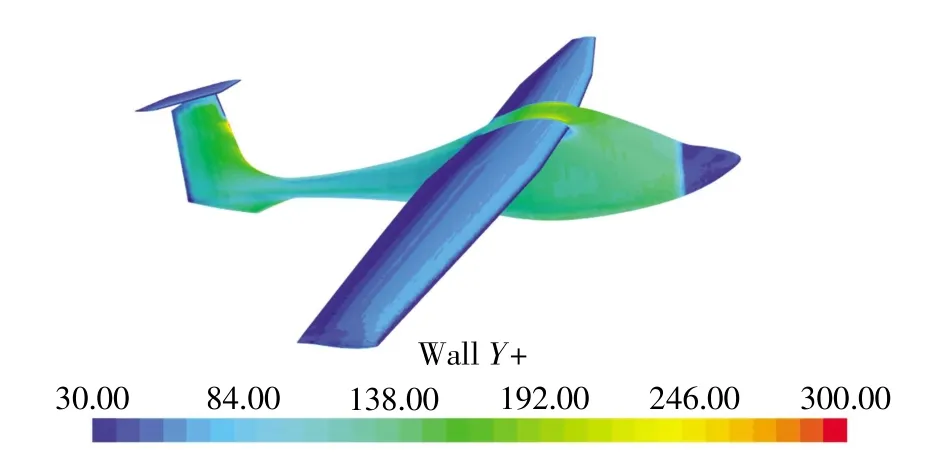
图4 机体表面y+值云图
2.3 数值模拟验证
因本文主要研究内容为飞机在水面以上的飞行过程,且受风洞水池实验条件和成本等因素的制约,故本文通过比较数值仿真结果和风洞试验测得数据,分析模拟方法的可行性。在空气域中分别模拟-6°~6°共13个工况下飞机的升力系数、阻力系数和升阻比,来流风速需定义在该型飞机的巡航速度区间(100~120 km/h)以内,模拟中的取值为31 m/s,迎角和侧滑角均设置为0°。在保证模拟结果一定精确程度的前提下,对飞机外形结构进行适当的简化,删减掉了起落架以便计算和分析。计算平均值后与风洞实验数据对比见图5。
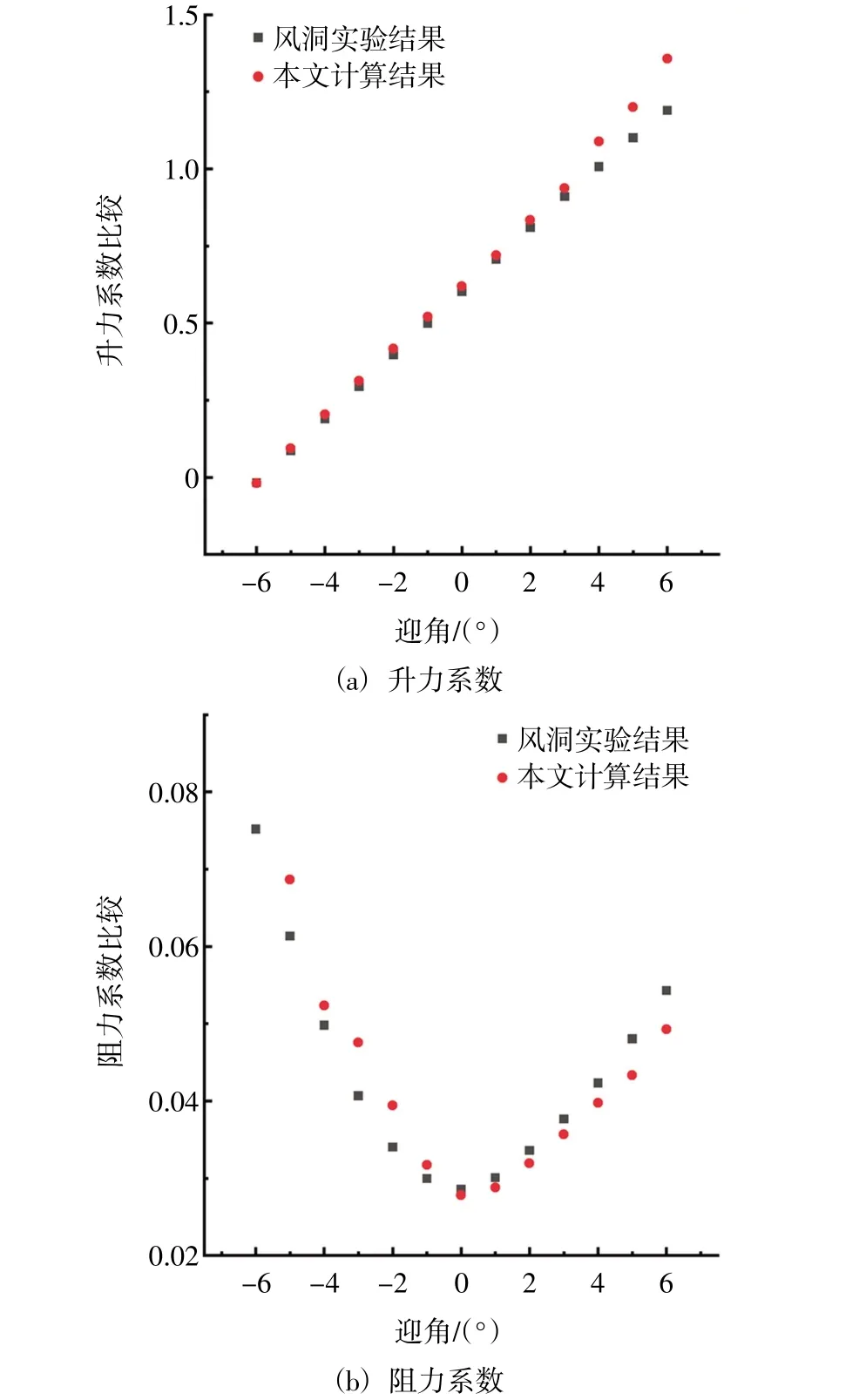
图5 数值模拟结果与实验数据对比图
3 近海面飞行气动特性分析
为了探究飞机距水面高度、迎角和海况不同时飞行气动特性变化情况,本文以升力系数、阻力系数、压力分布为主要指标展开研究。重点主要有三方面:首先模拟迎角为6°时,飞机从距水面15 m下降到距水面0.7 m的过程,探究不同飞行高度时静水面对飞机升力系数、阻力系数和机体压力分布的影响;其次在距静水面高度2 m时分别对迎角为0°、3°、6°和9°的飞机进行平飞模拟,分析迎角改变后液面影响程度的变化;最后在VOF波模型中设置波高、波长等参数,模拟飞机同样以6°迎角在波浪水面上空平飞,比较海况不同造成的影响。
3.1 距水面高度对气动特性的影响
分析距水面高度对电动飞机近海面飞行气动特性的影响,设置飞机平飞速度31 m/s,迎角6°,海浪等级为0。以飞机机头最前端作为参照,并依据飞机尾端临近水面时密集选点的原则选取距水面高度分别为15 m、2.5 m、2.0 m、1.0 m、0.9 m、0.7 m共6个工况,模拟每个工况下飞机的近海面飞行特性,分析升力系数和阻力系数的变化情况,得到时历曲线如图6所示。飞机机体在各不同高度时受到的剪切阻力和压差阻力如图7所示。

图6 不同离水高度下的飞机升力、阻力系数时历曲线
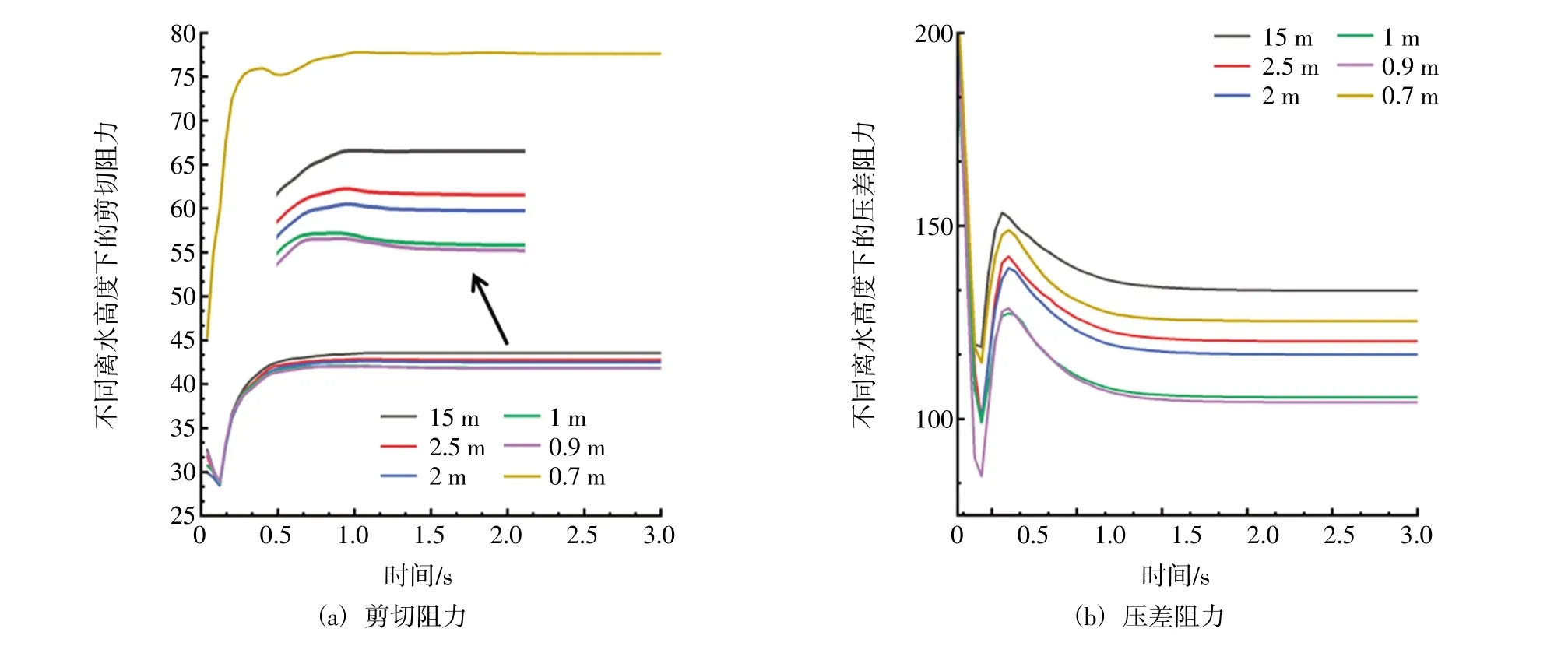
图7 剪切、压差阻力汇总图
从图6(a)中可看出随着飞机距水面高度降低,升力系数呈现出先增大后减小的变化趋势,从图6(b)中可看出阻力系数出现先减小后增大的趋势。升力系数增大与阻力系数减小这两点符合水面效应的典型作用规律,而后升力系数的减小与阻力系数的增大是因为当飞机高度下降到0.9 m时,从图7中的剪切阻力和压差阻力变化情况,以及图8飞机触水前后空气体积分数图来看,飞机虽未触水(图8(a)),但水面效应对飞机升力的提升效力减弱,升力系数已不再增大;高度继续下降到0.7 m时,机尾部分触水(图8(b)),水面效应的增升作用彻底消失,故升力系数减小且飞机受水流影响剪切阻力和压差阻力同时增加导致阻力系数增大。结果说明:飞机在近海面飞行时,水面效应区有效利用的前提是必须严格控制飞行高度,离水面过低时轻则增升效应减弱,重则触水后导致阻力急剧增大得不偿失,并有水载荷超过飞机材料本身承受能力的危险。图9所示为飞机触水前的压力云图,可以看出飞机下降过程中在机翼上方出现负压区,机翼上方压力呈现先增大后减小的趋势,而飞机机头上的压力值几乎一直不变。
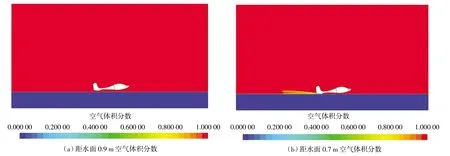
图8 飞机触水前后空气体积分数图

图9 不同高度下飞机表面的压力云图(静水)
3.2 迎角变化对气动特性的影响
减小定义飞机的平飞速度31 m/s,通过模拟不同迎角下飞机近海面的飞行过程,分析升力和阻力系数的变化情况,研究飞机迎角不同时受到静水面影响的差异。水上飞机水面正常降落时一般迎角较小,接水前飞行员改平,因此在迎角区间内等差选取模拟迎角为0°、3°、6°、9°,各工况下升力系数时历曲线如图10(a)所示,阻力系数时历曲线如图10(b)所示。
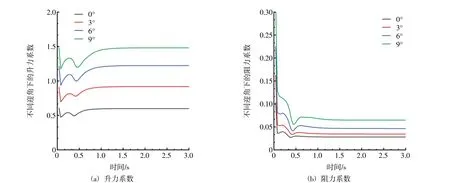
图10 不同迎角的升力、阻力系数时历图
通过对比分析图10中不同迎角下飞机的升力、阻力系数的变化可以看出在不超过失速迎角的前提下,升力、阻力系数的变化趋势与迎角的变化趋势是一致的,这种变化趋势与在地面飞行时相同[25]。
3.3 海况变化对气动特性的影响
论文最后分析了海况变化(水面波浪和风速)对气动特性的影响。首先对波浪进行建模,设置波高为0.2 m,波长为10 m,设置来流速度31 m/s,飞机迎角6°。同样选取距水面高度分别为15 m、2.5 m、2.0 m、1.0 m、0.9 m、0.7 m这6个工况进行监测。与静水条件下的结果对比分析后,发现在海面有波浪时,飞机的升力、阻力系数在1.5 s进入稳定期后并不像静水条件下那样几乎一成不变,而是像波浪一样作周期性变化,这说明飞机承受着周期性脉动载荷,但两者相位并不相同,这种变化与波浪高度有关。将有波浪时的各工况结果取稳定后4个周期数据进行平均,发现飞机飞行高度为0.9 m时,飞机尾部在每一个波浪周期内的某一瞬间触及波峰,从图11(a)中发现飞机不持续接水时对升力系数有较小影响,且从图11(b)中0.9 m时的阻力系数值依然小于1.0 m时的阻力系数值这点来看,飞机在0.9 m高度时并不受到周期性波浪力的影响;飞行高度0.7 m的飞机显然会受到周期性波浪力影响,升力系数减小,阻力系数增大,且由于在一个触水周期内触水深度周期性变化,两者也出现周期性变化。

图11 不同高度下升力、阻力系数时历图(波浪)
分别设置来流风速依次为27.7 m/s、30.25 m/s、32.8 m/s、35.35 m/s、37.9 m/s,速度设置的依据是以该型飞机巡航速度区间为上下限并在中间区段等差取3个不同速度值,高度为距水面15 m,迎角6°,探究不同风速对飞机升力系数和阻力系数如图12所示,可以看出随着风速的不断提高,飞机的升力系数和阻力系数都持续增大,符合空气动力学规律。
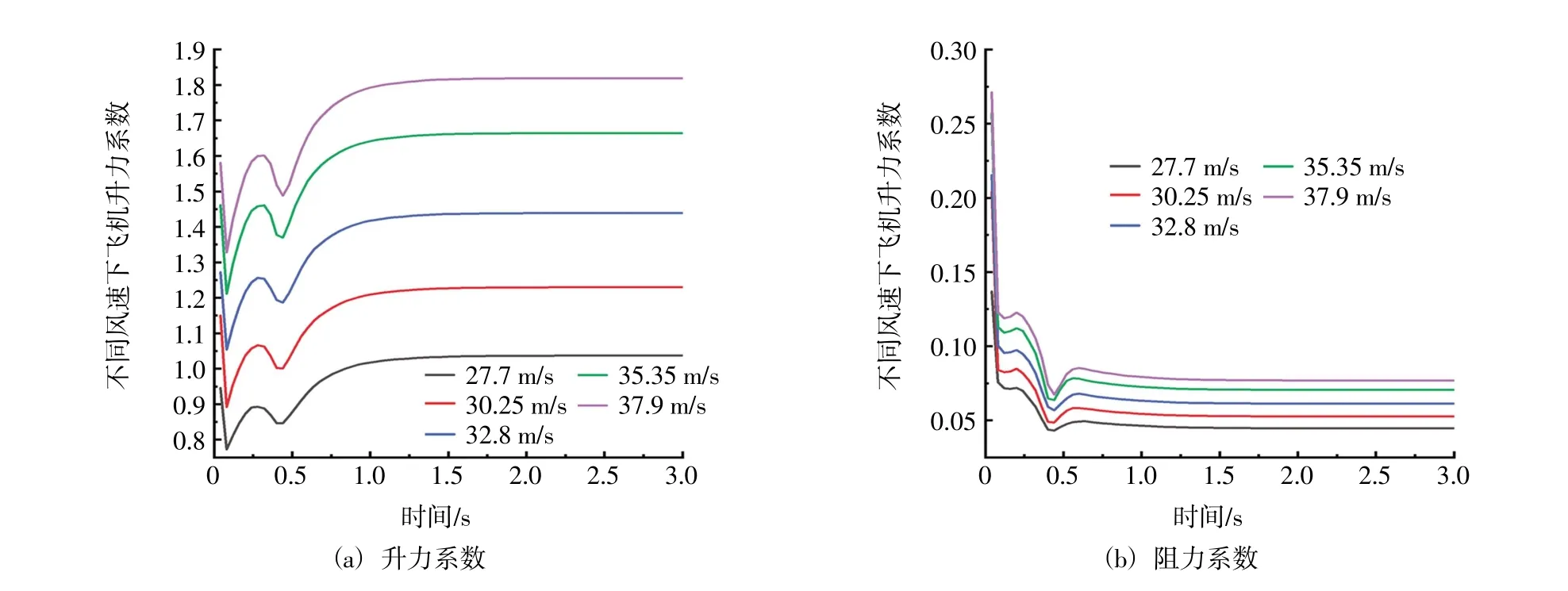
图12 不同风速下飞机升力、阻力系数时历图
4 结 论
本文基于数值模拟技术对某型电动飞机模型近海面飞行的气动特性进行研究,建立了电动飞机近海面飞行的数值模拟方案,比较分析了距水面高度、迎角和海况不同时气动特性的变化情况。研究结果表明本文所用数值模拟方案可行;电动飞机距水面飞行高度降低时,升力系数增大,阻力系数减小,当飞机继续抵近海面时水面效应的增升效果会减弱直至触水后完全消失,升力系数要先于阻力系数发生变化;飞机近海面飞行迎角变化引起的升力系数和阻力系数变化情况与在空气域中规律一致;在海面有波浪时,升力系数、阻力系数曲线随波浪作周期性变化,但其平均值与水面无波浪时的结果基本一致。
本文只是初步分析了电动飞机近海面气动特性,接下来将考虑安装浮筒后所带来的影响和水面效应与飞机动力耦合的情况,另外将重点研究着水过程中不同环境风速和浪向对飞机动稳定性的影响。
