电磁作动器出力特性及自适应抑制算法
2022-01-27张庆伟闫政涛杨理华
张庆伟, 俞 翔, 闫政涛, 杨理华
(1.海军工程大学 动力工程学院,武汉 430033;2.海军工程大学 舰船与海洋学院,武汉 430033;3.江汉大学 智能制造学院,武汉 430056;4.海军潜艇学院 动力操纵系,山东 青岛 266199;5.中国科学院声学研究所 噪声与振动重点实验室,北京 100190)
船用机械设备运转产生的振动会在海水中形成复杂的低频线谱噪声[1]。隔振是降低机械振动传递的有效途径之一,被动隔振在中高频段表现较好[2],但无法满足舰船机械设备低频振动隔离要求。主动隔振技术通过附加力源可有效抑制低频振动,目前国内外已展开诸多研究[3-4]。
Zhang等[5]设计了一种主动压电式作动器和橡胶被动隔振器相结合的混合隔振器,结构紧凑可靠性高,实现了共振频率振幅明显降低。Zhang等[6]设计了一种基于麦克斯韦法向应力的新型负刚度电磁作动器,可以提高静刚度下的低频隔振效果。刘露等[7]设计了一种压电式作动器有效抑制了飞行器振动对仪器仪表的干扰。但以上作动器难以满足对重量大、振动剧烈的船用机械设备隔振。李彦等[8]设计了一种空气弹簧和磁悬浮作动器相结合的一体化隔振器,但磁悬浮作动器出力线性度较差,需要进行非线性补偿,增加了控制难度。电磁式作动器能够较好解决上述问题,通过输出作用力来抵消线谱振动,适用于舰船设备的主动隔振。电磁作动器在一定范围内输出力与激励保持线性关系,但受永磁体磁化强度限制,随激励增大将导致作动器进入饱和区。当控制系统受到强烈干扰时,将输出较大控制信号,容易超出作动器工作电流范围,导致隔振系统失效。为提高电磁作动器性能,石慧等[9]对作动器动子或定子形态、气隙、倒角形式和线圈匝数等进行了优化分析;宁一高等[10]通过在不同工况下改变作动器的刚度降低力传递率来提高隔振效果;马建国等[11]以降低铁损耗和铜损耗为目标,对永磁体参数、磁极尺寸和匝数进行了调整。但始终因磁饱和现象,无法实现在强烈干扰或冲击下的主动隔振。
本文对电磁作动器进行了仿真和试验分析,为保证在强烈干扰下系统实现有效控制,提出了自适应抑制算法,仿真和试验结果表明,该算法较好解决了作动器饱和影响,对双频激励取得了显著的控制效果,在受到冲击时展现了较强的抗干扰能力。
1 电磁作动器
1.1 结构分析
电磁作动器由定子铁芯、线圈、永磁体、动子铁芯、簧片和动子芯轴等组成。其原理为线圈通入交流电产生交变磁场与永磁体恒定磁场相互作用输出电磁力。其内部结构和动力学模型如图1所示。

(a) 作动器结构图

(b) 动力学模型图1 电磁作动器结构图及力学模型
作动器的动力学方程为
(1)

K(jω)I
(2)
式中:Br为永磁体剩余磁化强度;μ0为空气磁导率;αleak为漏磁系数;agap为气隙宽度;h为气隙高度;l为永磁体高度;dmov为动子外径;wpm为永磁体厚度;RAC(jω)为交流磁路磁阻;Rmov(jω)为永磁体磁阻。由式(2)可知,电磁出力与电流保持线性关系。
1.2 磁路仿真
基于COMSOL中AC/DC模块磁场(mf)接口对作动器磁路结构进行电磁仿真。运用麦克斯韦张量法进行有限元分析,表达式为
∇·B=0
∇·D=ρ

(3)
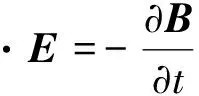
式中:J表示电流密度;ρ表示剩余电荷密度;D表示电位移矢量;E表示电场强度;本构关系为D=ε0εrE;B表示磁感应强度,H表示磁场强度,本构关系为B=μ0μrH+Br。各参数设置情况如表1所示。进行网格剖分,为保证计算精确,在出力区域细化处理。添加频域计算,得到磁路仿真图如图2所示,色谱表示磁通密度模,线上箭头表示磁路方向。
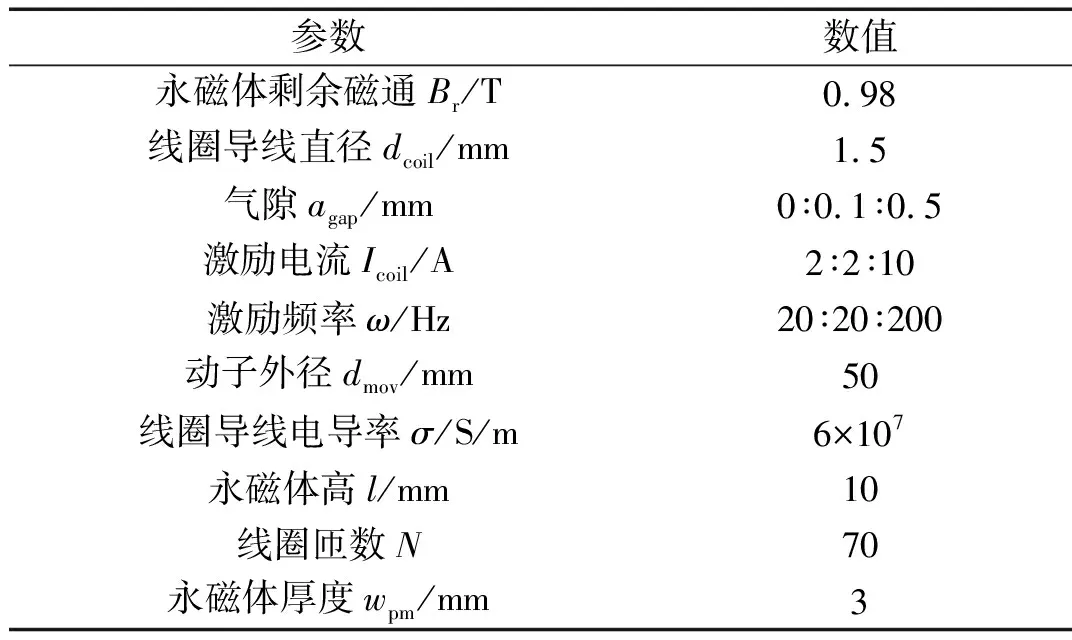
表1 磁路模型主要参数设置情况
对结果进行后处理,研究气隙宽度agap对电磁输出力的影响,结果如图3所示。各激励频率在agap=0.3 mm输出力达到最大值。在6 A电流、20 Hz频率激励下,输出力能够达到130 N。

图2 电磁作动器磁路仿真图Fig.2 Magnetic circuit simulation diagram of electromagnetic actuator
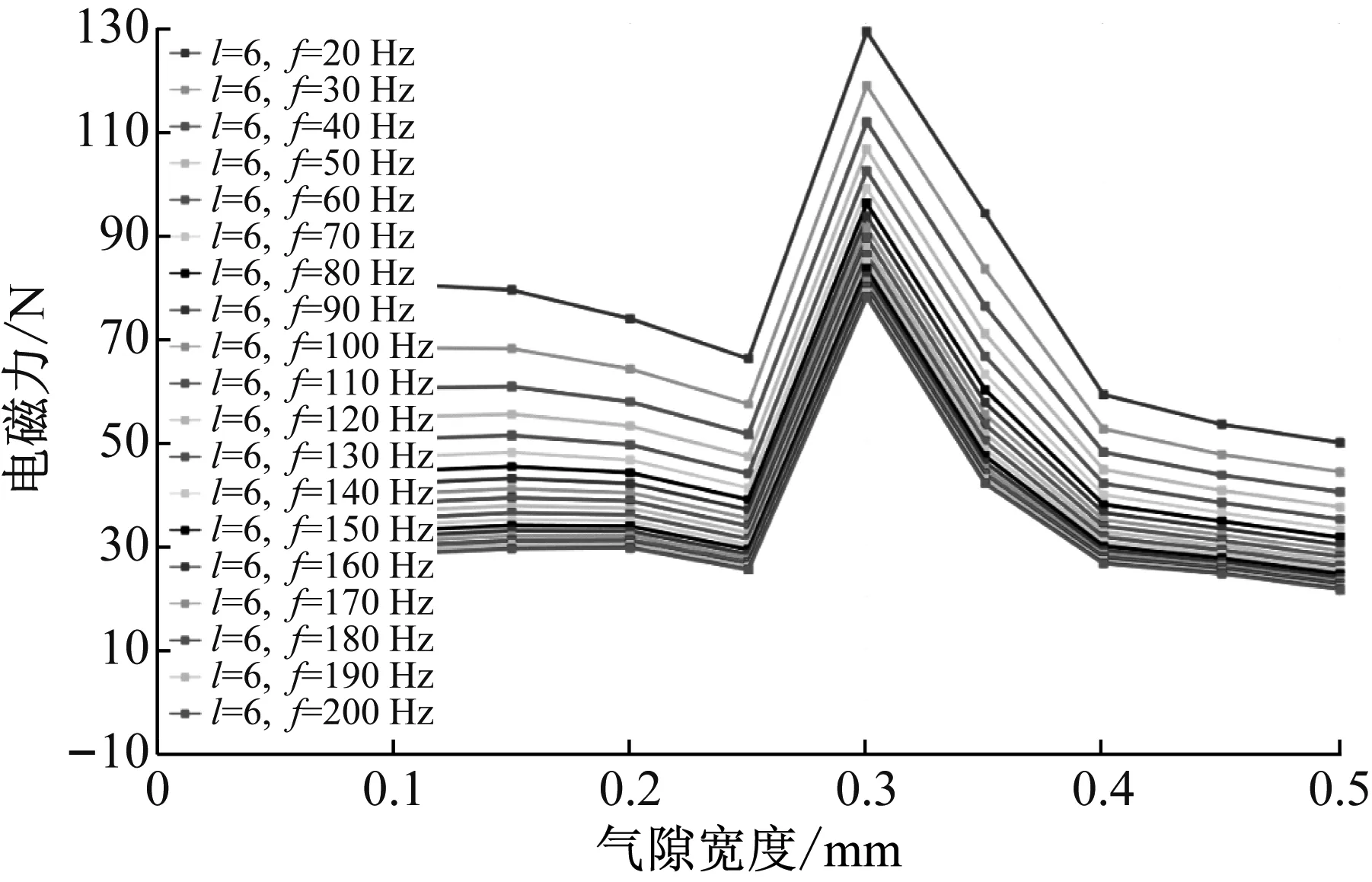
图3 电磁作动器出力随气隙宽度变化值
研究电磁输出力和电流、频率关系,得到结果如图4所示,仿真结果符合理论定性分析,电磁输出力与电流保持线性关系。

图4 电磁作动器输出力随电流变化关系Fig.4 The relationship between the output force of the electromagnetic actuator and the current
1.3 出力测试
电磁力的输出需要经过动子铁芯和簧片等机械元件才能到达隔振设备,搭建了电磁作动器出力性能的测试工装,示意图如图5所示。
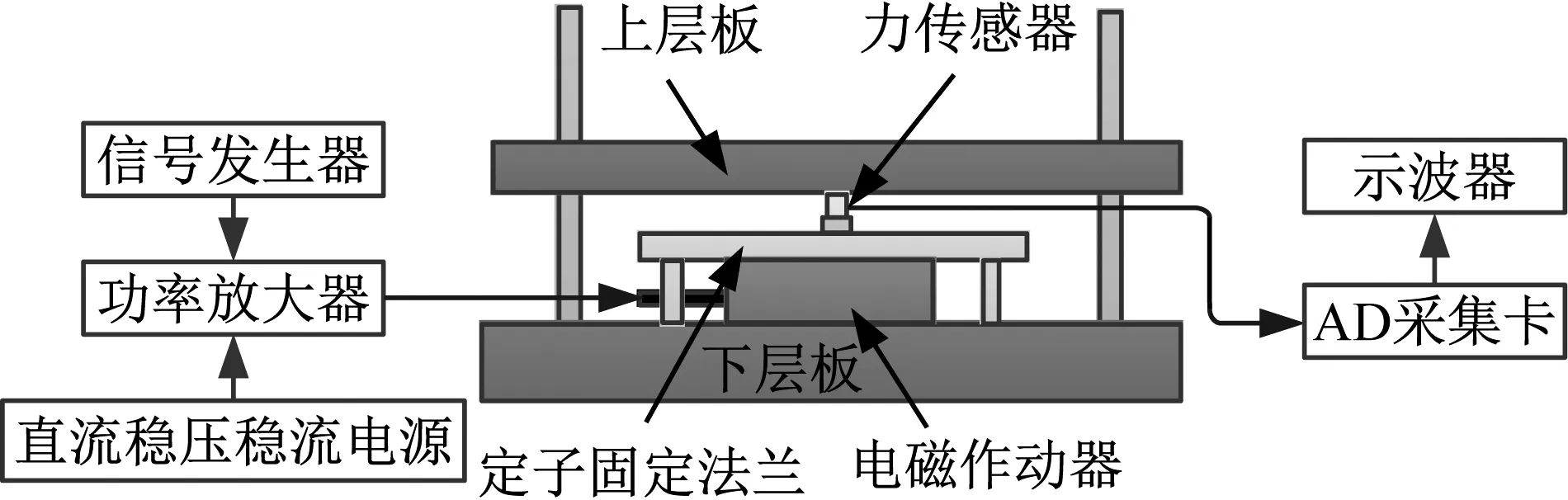
图5 电磁作动器出力性能测试工装Fig.5 Electromagnetic actuator output performance test tool
信号发生器按照一定的扫描方式输出不同频率、不同电流的正弦激励给功率放大器,驱动电磁作动器,ICP型力传感器对拉压力进行测量,传感器内置了专门的集成调理电路,AD采集板卡对力信号完成采集。得到输出力测试结果如图6和7所示。
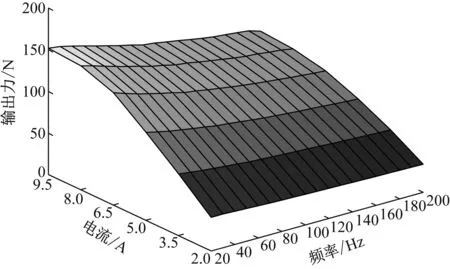
图6 电磁作动器出力性能测试结果Fig.6 Test results of output performance of electromagnetic actuator
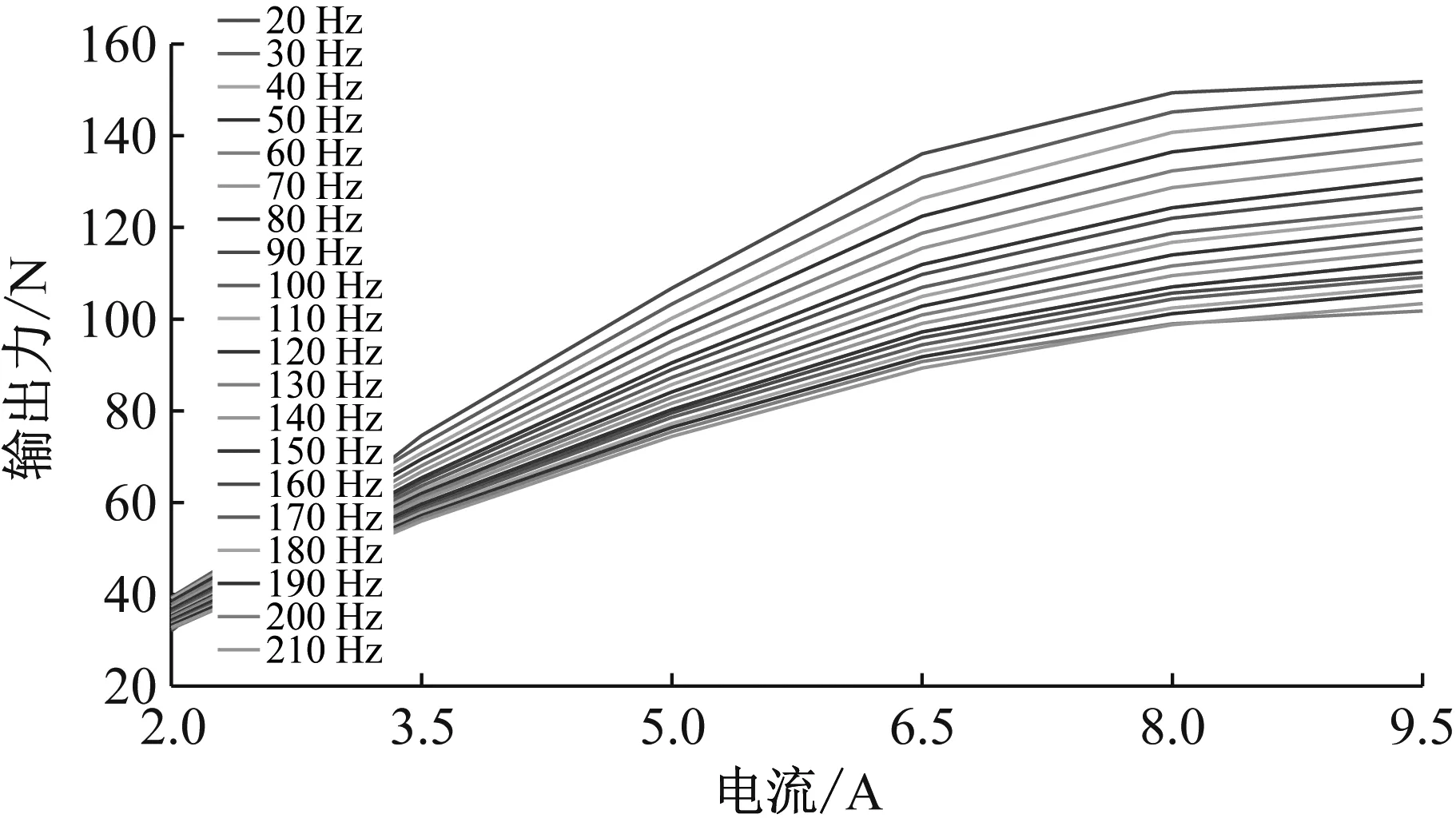
图7 测试输出力随电流变化关系Fig.7 The relationship between Test output force and current
由图7可知,在激励电流6.5 A之前,测试输出力与电流大小保持良好的线性关系,且与仿真结果吻合度较高。在6.5 A之后输出力低于仿真计算结果,在8 A电磁力趋于平稳。其原因在于随电流增大,当定子磁场强度达到一定时,永磁体的磁化强度达到饱和状态。根据B-H磁化曲线可知,磁场强度H增大到一定程度,磁感应强度B不再增加,说明了电磁力的输出因磁饱和而收敛到定值。
2 自适应抑制算法
在自适应控制过程中,当系统受到外界强烈干扰,误差信号激增,引起控制权系数剧烈变化,使得输出信号超出作动器有效工作范围,最终导致系统发散失控。因此应对控制器的输出信号进行约束,将幅值限定在作动器饱和区以内。本文在FXLMS算法基础上引入抑制因子,对控制器权系数的更新进行调整。
FXLMS算法将最小均方算法与次级通道滤波结构相结合对权矢量w(n)进行更新,在主动控制领域被广泛应用。其算法原理图如图8所示。
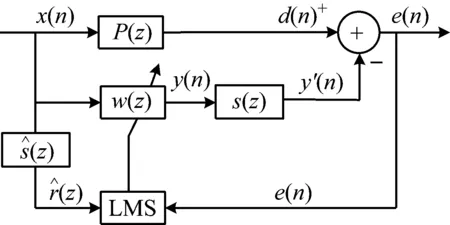
图8 FXLMS算法框图Fig.8 FXLMS algorithm block diagram
FXLMS算法的权系数迭代公式为
w(n+1)=w(n)+μ∇(n)=

(4)

(5)
对控制器输出信号进行约束,可写为
(6)
式中:τ为约束阈值,sign(wTx)为取符运算,即当超出阈值时进行限幅,在范围内时按式(4)原始进行更新。
在式(6)基础上,为保证控制精度,引入拉格朗日函数求取条件极值,设定目标函数为
(7)
对w、λ分别求导
(8)
令式(8)结果均为零,得到
(9)
(10)
(11)
将Δw作为抑制因子引入式(4)对权系数更新进行修正,得到最终迭代公式

(12)
通过抑制因子的引入,当控制器输出在τ值以下时式(12)等同于式(4);当控制器输出在τ值以上时Δw迅速减小至零,使得权系数更新幅值减小,输出稳定在阈值附近,从而避免作动器进入饱和区。
根据式(6)输出形式,可取反正切函数,如
(13)
得到其导函数为
(14)
式中:α为与阈值有关的系数,β可调整导函数窗宽。图9为反正切函数及导函数图像。
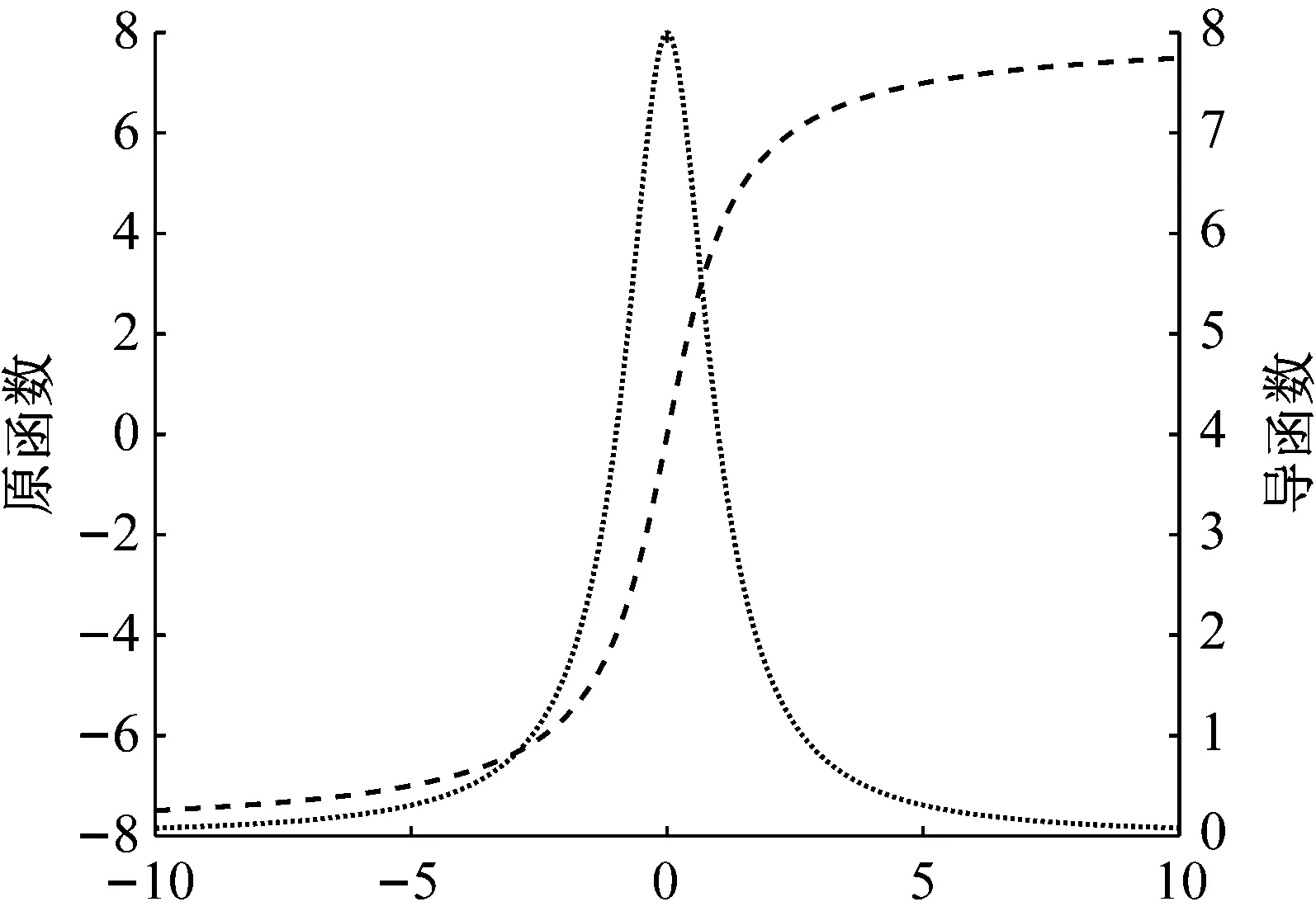
图9 反正切函数及其导函数Fig.9 Arctangent function and its derivative function
3 仿真分析
对上述抑制算法进行仿真验证,根据电磁作动器测试试验,阈值τ设为8,表示作动器的最大输入电流信号为8A。在实际控制中,为满足式(6)要求,应分段处理,即设置不同的β,得到分段函数如式(15)所示。
(15)
采用频率为37 Hz和60 Hz幅值均为8的双频谐波信号叠加信噪比20 dB的高斯噪声作为参考信号。控制滤波器长度均为300阶。算法迭代步长为0.000 1。得到各算法误差信号控制前后时间历程及控制输出信号结果如图10~12所示。

图10为未考虑作动器饱和时FXLMS算法结果,未引入抑制因子时,控制器输出信号明显超出阈值。图11为考虑作动器饱和,对超出阈值部分直接限幅处理,从图11(b)可以看出,对输出信号进行限幅相当于削波处理,不利于系统控制稳定性。在刚开始迭代时,输出幅值在阈值以内,误差信号得到了有效收敛,当超过阈值时,由于削波使得算法失效,导致系统发散。图12为考虑作动器饱和,自适应抑制算法结果。由图12(a)可知,误差信号迅速实现收敛,表明了Δw的引入加快了收敛速度,且幅值降低了85%左右。由图12(b)得到输出信号较好约束在阈值以内,与图11(b)相比,实现了平稳输出,表明式(12)对输出信号的可靠调整。根据仿真结果,证明了抑制算法对输出信号的有效约束和振动的显著控制。
4 试验分析
进一步验证算法可行性,采用NI PXI搭载RT系统进行主动隔振试验。试验对象为电磁激振器及附加配重,用来模拟中小型机械设备。将本文设计的作动器与被动隔振装置有效集成为主被动复合隔振器,在无输出力时具有较好的被动隔振效果和承载能力。试验设备主要有NI PXI控制系统,Copley Xenus伺服驱动器,PCB加速度传感器,电磁激振器,WYK-20040K直流稳压稳流电源等,试验台架及原理示意图如图13所示。

(a) 试验台架

(b) 试验原理示意图
在试验前先对系统次级通道进行离线辨识,利用20~200 Hz白噪声激励作动器,采用横向FIR滤波器作为辨识模型,长度为200阶。通过LMS算法不断更新其权系数逼近次级通道真实传递函数,幅值曲线趋于平稳后辨识结束,得到次级通道矩阵并将其写入下位机。
由信号发生器产生37 Hz、60 Hz双频幅值均为8 A谐波信号作为初始激励信号。控制滤波器长度均为300阶。算法迭代步长为0.000 03。采样频率设定为10 kHz,即满足采样定理,又保证对信号的实时跟踪。针对AD板卡采集信号存在的50 Hz工频干扰,在试验中设计巴特沃斯带阻滤波器进行滤除。以下层误差信号传感器采集的加速度响应作为评价标准,开启主动控制前后信号的降幅即为隔振效果。在试验进行2 s后,开启算法控制。得到时频域控制效果和输入电流幅值如图14、15所示。
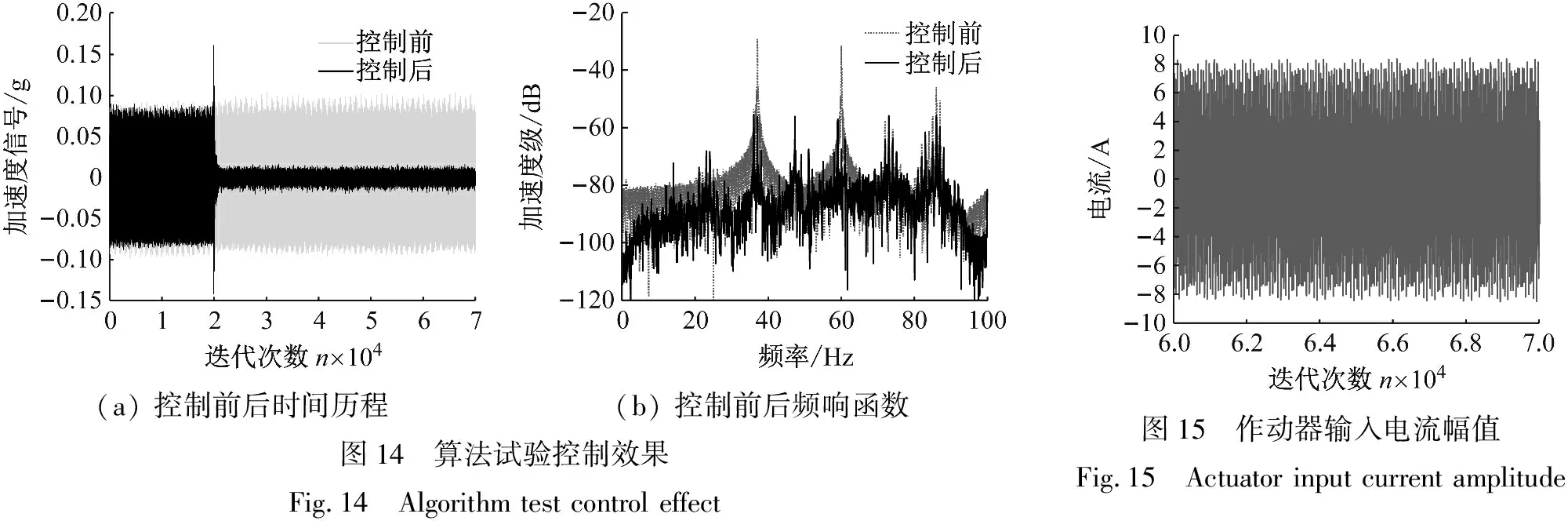
控制开启后,在时域上误差信号迅速得到收敛,且幅值降低了85%以上。在频域上对37 Hz和60 Hz线谱分别衰减了27 dB和35 dB,控制效果较好。输入电流也较好地约束在±8 A以内。试验结果表明在较大干扰下,自适应抑制算法能够较好约束输出信号,保证电磁作动器在正常激励电流内工作,实现了对振动的有效隔离。
进一步验证算法鲁棒性,在试验运行到20 s时,对系统基座施加冲击,误差信号能够迅速稳定,在21~22 s之间连续施加冲击,误差信号仍能够快速稳定到收敛值。其加速度响应时间历程如图16所示。通过对系统不断施加冲击,说明了抑制算法仍能有效控制输出信号,在误差信号急剧增大时,控制器权系数能够迅速回稳。因此得出算法具有较强的抗干扰能力。
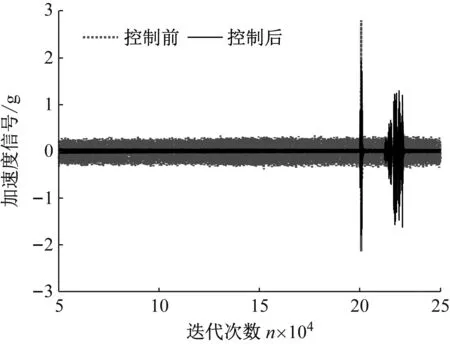
图16 加冲击后加速度响应时间历程Fig.16 Acceleration response time history after shock
5 结 论
(1) 针对船用机械设备低频线谱振动,电磁式作动器具有结构紧凑、输出力大、承载能力大、线性度高等优点。通过对电磁作动器特性分析得出随电流激励增大,作动器会由于磁饱和而进入饱和区。当系统受到强烈干扰或冲击,容易导致控制器输出信号超出作动器工作电流范围,使得控制发散。
(2) 为保证系统受到强烈冲击不失效,通过引入了抑制因子对控制权系数更新进行修正,在阈值范围内按原始信号输出,当超出阈值时,权系数不再更新,输出信号限幅。仿真和试验结果表明,该算法较好解决了作动器饱和影响,对双频激励取得了显著的控制效果,在受到冲击时展现了良好的控制鲁棒性。
